Clear Sky Science · fr
Détection d’objets sous-marine en temps réel via dynamique dans le domaine fréquentiel et modulation spatiale améliorée des caractéristiques
Voir clairement sous les vagues
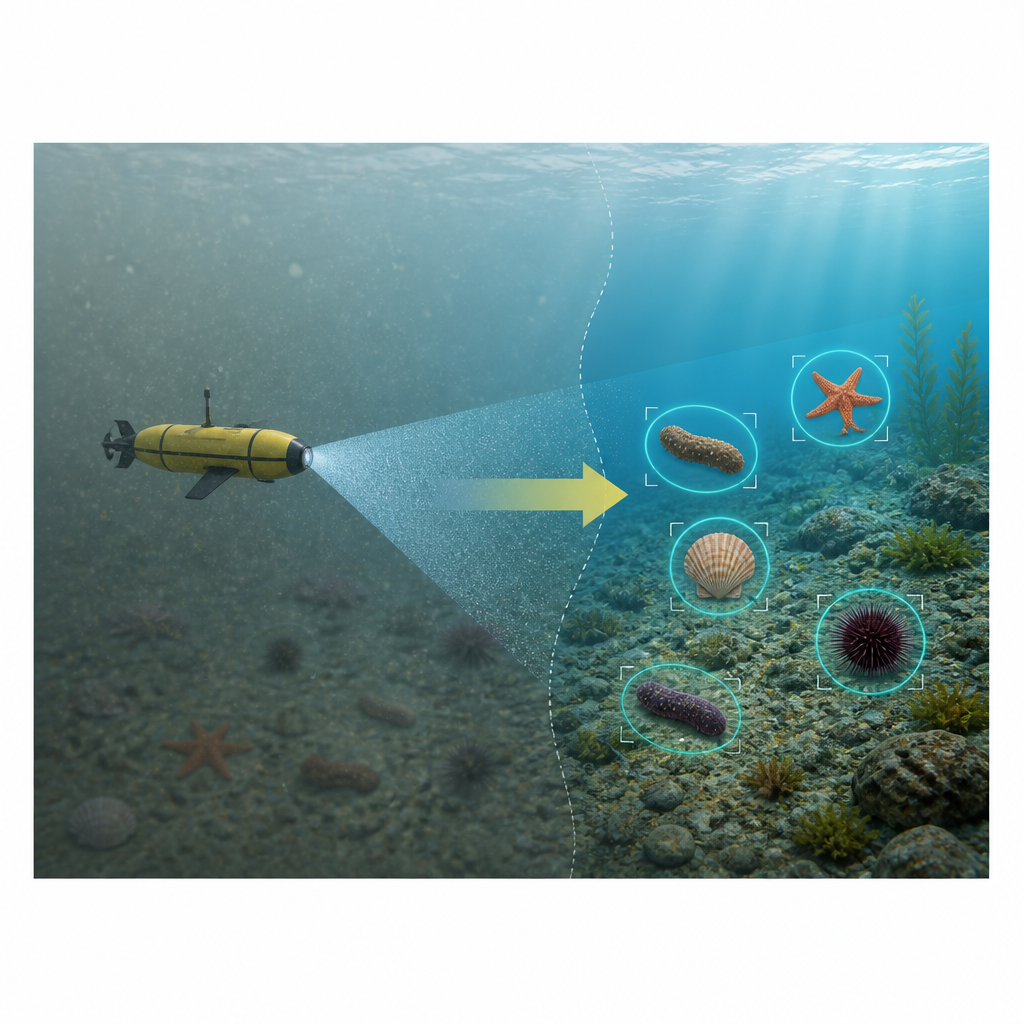
Le monde sous la mer est essentiel pour la sécurité alimentaire, l’énergie et la santé environnementale, mais il est aussi difficile à observer. L’eau trouble, les particules en suspension et la faible luminosité peuvent rendre des tâches simples — comme compter des étoiles de mer ou vérifier des conduites au fond de l’océan — étonnamment ardues. Cette étude présente une nouvelle méthode de vision par ordinateur qui aide les robots et caméras sous-marins à repérer de petits animaux marins de manière plus précise et plus rapide, même lorsque la vue est floue ou voilée.
Pourquoi la vision sous-marine est si difficile
Contrairement à l’air, l’eau courbe et diffuse la lumière, en particulier les rouges et les jaunes dont nos yeux se servent pour le contraste. Les images prises sous l’eau apparaissent souvent bleu-vert, brumeuses et pauvres en détails, avec un fort rétroéclairage dû aux particules flottantes. De petits animaux comme les pétoncles ou les oursins peuvent occuper seulement quelques pixels sur une image et se confondre facilement avec des rochers, du sable ou des algues. Les logiciels traditionnels de détection d’objets, conçus à l’origine pour des images nettes en milieu terrestre, ont tendance à manquer ces cibles faibles ou à confondre le bruit de fond avec de vrais animaux. Parallèlement, les robots et capteurs sous-marins fonctionnent souvent sur du matériel limité, si bien que la méthode de détection doit être rapide et légère, pas seulement précise.
Une manière plus rapide d’exploiter des images bruitées
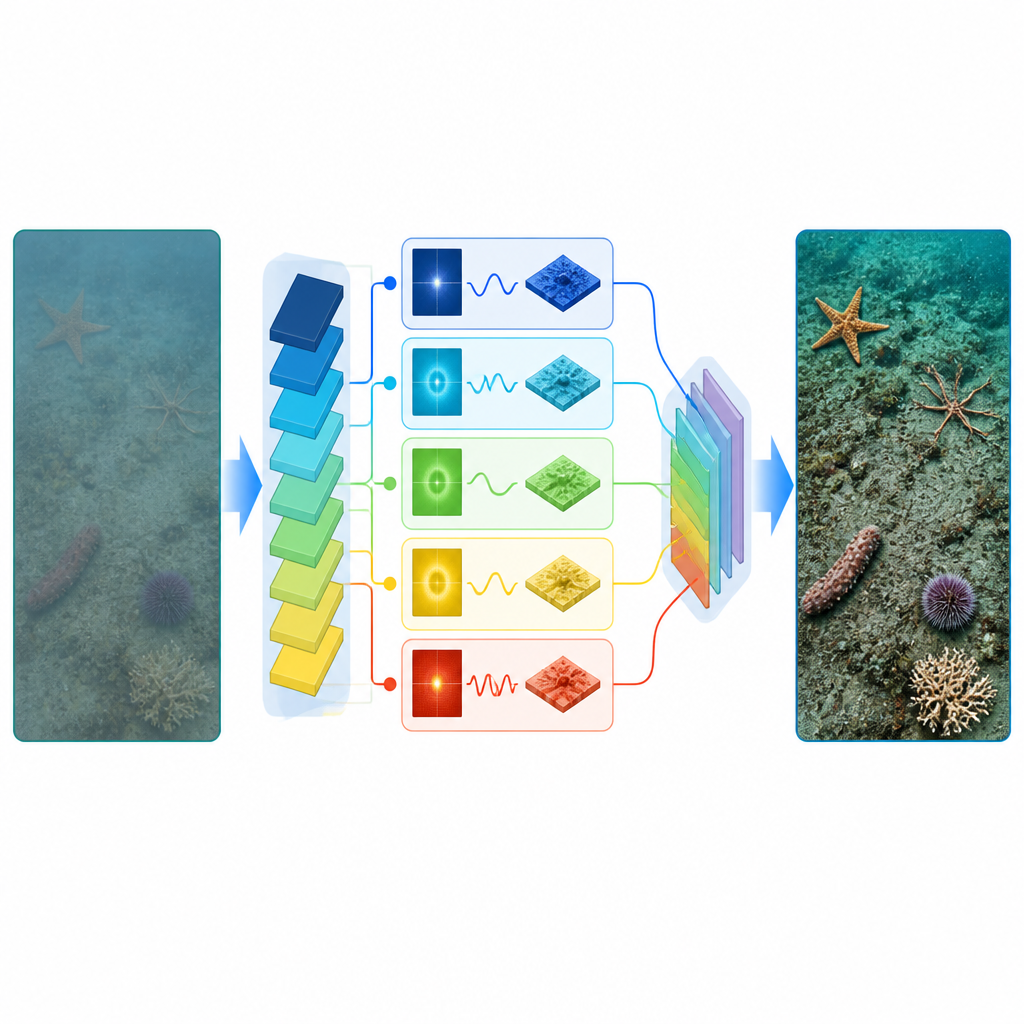
Les auteurs s’appuient sur une famille récente de modèles connue sous le nom de Detection Transformers, qui analysent une image en apprenant les relations entre toutes ses parties au lieu de faire glisser une petite fenêtre dessus. Leur variante conserve la vitesse en temps réel d’un système antérieur appelé RT-DETR mais remplace le backbone par un nouveau, nommé FasterFDBlock, mieux adapté aux scènes sous-marines bruyantes. Ce backbone combine une astuce appelée convolution partielle, qui ne traite qu’une fraction des canaux d’image pour gagner du temps, avec une approche fréquentielle de l’image. En travaillant dans le domaine fréquentiel, le modèle peut distinguer le bruit ponctuel aléatoire des contours nets qui délimitent les animaux, atténuant le premier tout en préservant le second et réduisant les calculs inutiles.
Garder les petits animaux nets
Les réseaux profonds de vision perdent souvent les détails fins lorsqu’ils réduisent progressivement une image pour extraire des motifs de haut niveau. Cela peut être fatal pour repérer de minuscules pétoncles ou étoiles de mer déjà proches du seuil de visibilité. Pour lutter contre cela, les chercheurs repensent le bloc d’attention central de l’encodeur, créant ce qu’ils appellent AIFI-SEFN. Concrètement, une branche de ce module considère l’image dans son ensemble via l’attention, tandis qu’une branche complémentaire se concentre sur la texture locale et la forme. Elle agrège et rééchantillonne les caractéristiques à différentes échelles, utilise des convolutions légères pour capturer les arêtes et motifs, puis module la quantité de détail laissée passer. Le résultat est un mélange plus riche de contexte global et de structure locale nette, de sorte que les petits animaux ressortent plus clairement sur des fonds rocheux ou végétaux irréguliers.
Fusionner l’information à travers les échelles
Les images sous-marines contiennent rarement des objets d’une seule taille ; le même type d’organisme peut apparaître comme une minuscule tache au loin ou comme un grand amas au premier plan. Les méthodes simples de fusion d’informations entre couches peu profondes et profondes, comme l’addition brute de cartes de caractéristiques, peuvent enterrer les petits détails sous de puissants signaux de haut niveau ou laisser le bruit superficiel dominer la scène. Le nouveau module de modulation multi-échelle des caractéristiques s’attaque à ce problème en résumant d’abord ce que chaque couche « voit » par un pool global, puis en assignant des poids adaptatifs aux caractéristiques sémantiques et détaillées pour chaque canal. Ces poids sommeillent toujours à un, de sorte que le modèle doit décider, canal par canal, si le détail ou le contexte large est le plus important. Ce mélange sélectif renforce les signaux des vraies cibles et atténue les distractions causées par les rochers, le sable et les ombres, sans ajouter beaucoup de coût supplémentaire.
Que vaut la méthode en pratique
L’équipe a testé son approche sur un jeu de données public difficile d’images sous-marines incluant concombres de mer, oursins, pétoncles et étoiles de mer, dont beaucoup sont petits, superposés ou partiellement cachés. Par rapport au modèle RT-DETR d’origine, le nouveau système a augmenté le score standard de détection (mean Average Precision) de 70,4 à 72,1 pour cent tout en réduisant le nombre de paramètres de plus d’un quart et en diminuant la quantité de calcul d’à peu près un quart. Il fonctionne toujours à plus de 70 images par seconde, suffisamment rapide pour une utilisation en temps réel sur du matériel graphique courant. Des comparaisons visuelles des cartes de chaleur et des résultats de détection montrent que le modèle amélioré se concentre davantage sur les animaux réels, ignore les textures confuses des rochers et des algues, et récupère plus de cibles minuscules ou à faible contraste dans des scènes troubles ou peu éclairées.
Ce que cela signifie pour le travail sous-marin
Concrètement, cette recherche montre comment enseigner à un modèle léger et rapide à mieux voir dans l’un des environnements visuels les plus difficiles de la planète. En façonnant soigneusement la façon dont le réseau traite les fréquences bruitées, le détail local et les caractéristiques à différentes échelles, les auteurs rendent la détection d’objets sous-marine à la fois plus précise et plus efficace. Cet équilibre est important pour les véhicules sous-marins autonomes et autres systèmes de terrain qui doivent prendre des décisions rapides et fiables avec une puissance de calcul limitée. À mesure que ces méthodes seront adaptées à davantage de jeux de données et de plateformes embarquées, elles pourraient aider les scientifiques à surveiller la vie marine, les ingénieurs à inspecter les structures sous-marines et les robots à naviguer des fonds marins complexes avec plus de confiance.
Citation: Cai, S., Zhu, A. Real-time underwater object detection via frequency-domain dynamics and spatially enhanced feature modulation. Sci Rep 16, 14884 (2026). https://doi.org/10.1038/s41598-026-44628-9
Mots-clés: détection d’objets sous-marine, véhicules sous-marins autonomes, vision en temps réel, reconnaissance de petits objets, caractéristiques dans le domaine fréquentiel