Clear Sky Science · it
Rilevamento in tempo reale di oggetti subacquei tramite dinamiche nel dominio della frequenza e modulazione spazialmente potenziata delle caratteristiche
Vedere chiaramente sotto le onde
Il mondo sotto il mare è fondamentale per la sicurezza alimentare, l’energia e la salute ambientale, ma è anche difficile da osservare. Acqua torbida, particelle in sospensione e luce fioca possono rendere sorprendenti difficili anche compiti semplici, come contare le stelle marine o controllare tubazioni sul fondale. Questo studio introduce un nuovo metodo di visione artificiale che aiuta robot e telecamere subacquee a individuare piccoli animali marini con maggiore precisione e rapidità, anche quando la visuale è sfocata o offuscata.
Perché la visione subacquea è così difficile
A differenza dell’aria, l’acqua devia e diffonde la luce, specialmente i rossi e i gialli che i nostri occhi usano per il contrasto. Le immagini scattate sott’acqua spesso appaiono blu-verdi, nebbiose e povere di dettaglio, con forte retrodiffusione dovuta a particelle sospese. Piccoli animali come capesante o ricci di mare possono occupare solo poche pixel in un’immagine e confondersi facilmente con rocce, sabbia o alghe. I software di rilevamento tradizionali, progettati originariamente per immagini nitide terrestri, tendono a perdere questi bersagli deboli o a scambiare il disordine di sfondo per veri animali. Allo stesso tempo, robot e sensori subacquei spesso operano su hardware limitato, quindi il metodo di rilevamento deve essere rapido e leggero, non solo accurato.
Un modo più veloce per leggere immagini rumorose
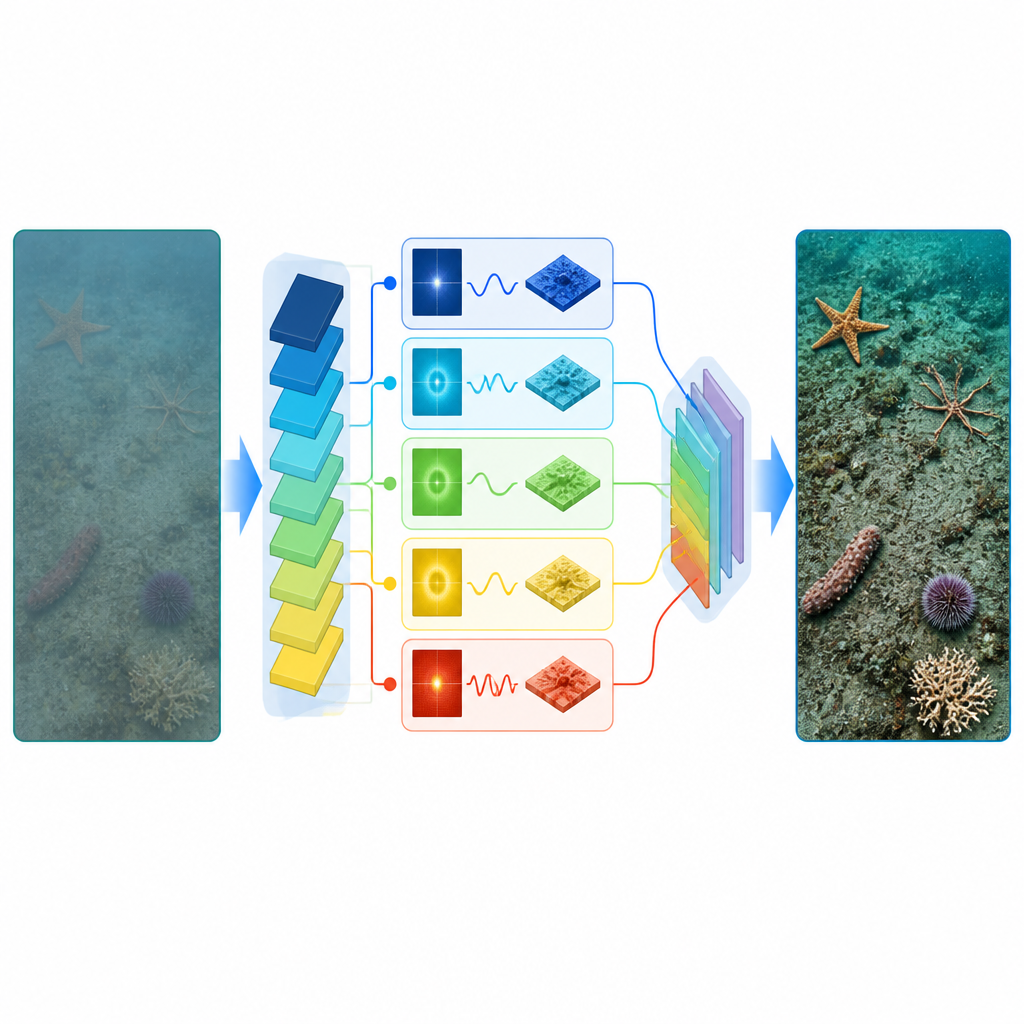
Gli autori si basano su una recente famiglia di modelli noti come Detection Transformers, che esaminano un’immagine imparando le relazioni tra tutte le sue parti anziché scorrere una piccola finestra. La loro variante mantiene la velocità in tempo reale di un sistema precedente chiamato RT-DETR ma sostituisce il backbone con uno nuovo, chiamato FasterFDBlock, più adatto alle scene subacquee rumorose. Questo backbone combina una tecnica chiamata convoluzione parziale, che elabora solo una frazione dei canali dell’immagine per risparmiare tempo, con una visione basata sulle frequenze dell’immagine. Lavorando nel dominio della frequenza, il modello riesce a distinguere il rumore puntinato casuale dai contorni netti che delineano gli animali, attenuando il primo mentre preserva il secondo e riducendo calcoli inutili.
Mantenere i piccoli animali a fuoco
Le reti profonde di visione spesso perdono dettagli fini man mano che riducono ripetutamente l’immagine per estrarre schemi di livello superiore. Questo può essere fatale per individuare minuscole capesante o stelle marine che già si trovano ai limiti della visibilità. Per contrastare questo effetto, i ricercatori riprogettano il blocco di attenzione centrale nell’encoder, creando ciò che chiamano AIFI-SEFN. In termini semplici, un ramo di questo modulo osserva il quadro generale usando l’attenzione, mentre un ramo complementare si concentra su texture e forme locali. Esegue pooling e ingrandimento delle caratteristiche su più scale, utilizza convoluzioni leggere per catturare bordi e pattern e poi regola quanta di questa informazione dettagliata viene fatta passare. Il risultato è una miscela più ricca di contesto globale e struttura locale nitida, così i piccoli animali risaltano con maggiore chiarezza su fondali rocciosi e vegetazione.
Fusione delle informazioni attraverso le scale
Le immagini subacquee raramente contengono oggetti di una sola dimensione; lo stesso tipo di organismo può apparire come un minuscolo puntino in lontananza o una grande macchia in primo piano. Modi semplici di fondere informazioni da layer superficiali e profondi, come sommare le mappe di caratteristiche, possono seppellire i dettagli piccoli sotto forti segnali di alto livello o permettere al rumore superficiale di sovrastare la scena. Il nuovo modulo Multi-scale Feature Modulation affronta questo problema riepilogando prima ciò che ogni livello “vede” tramite pooling globale, quindi assegnando pesi adattivi alle caratteristiche semantiche e dettagliate per ogni canale. Questi pesi sommano sempre a uno, quindi il modello deve decidere, canale per canale, se conta di più il dettaglio o il contesto ampio. Questa fusione selettiva rafforza i segnali dei veri bersagli e attenua le distrazioni dovute a rocce, sabbia e ombre, senza aggiungere un costo computazionale significativo.
Quanto funziona il metodo
Il team ha testato l’approccio su un dataset pubblico impegnativo di immagini subacquee che include cetrioli di mare, ricci, capesante e stelle marine, molti dei quali piccoli, sovrapposti o parzialmente nascosti. Rispetto al modello RT-DETR originale, il nuovo sistema ha aumentato il punteggio standard di rilevamento (mean Average Precision) dal 70,4 al 72,1 percento, riducendo nel contempo il numero di parametri di oltre un quarto e diminuendo la quantità di calcolo di quasi un quarto. Funziona ancora a oltre 70 fotogrammi al secondo, abbastanza rapido per l’uso in tempo reale su hardware grafico tipico. Confronti visivi di mappe di attivazione e risultati di rilevamento mostrano che il modello migliorato si concentra meglio sugli animali reali, ignora texture fuorvianti in rocce e alghe e recupera più bersagli piccoli o a basso contrasto in scene torbide o a bassa luminosità.
Cosa significa per il lavoro subacqueo
In termini pratici, questa ricerca mostra come insegnare a un modello snello e veloce a vedere meglio in uno dei contesti visivi più difficili sulla Terra. Modellando con cura il modo in cui la rete gestisce le frequenze rumorose, i dettagli locali e le caratteristiche a diverse scale, gli autori rendono il rilevamento subacqueo sia più accurato sia più efficiente. Questo equilibrio è importante per veicoli subacquei autonomi e altri sistemi sul campo che devono prendere decisioni rapide e affidabili con potenza di calcolo limitata. Man mano che questi metodi saranno adattati a più dataset e piattaforme embedded, potrebbero aiutare gli scienziati a monitorare la vita marina, gli ingegneri a ispezionare strutture subacquee e i robot a navigare terreni di fondale complessi con maggiore fiducia.
Citazione: Cai, S., Zhu, A. Real-time underwater object detection via frequency-domain dynamics and spatially enhanced feature modulation. Sci Rep 16, 14884 (2026). https://doi.org/10.1038/s41598-026-44628-9
Parole chiave: rilevamento oggetti subacquei, veicoli subacquei autonomi, visione in tempo reale, riconoscimento di piccoli oggetti, caratteristiche nel dominio delle frequenze