Clear Sky Science · nl
Realtime detectie van onderwatervoorwerpen via frequentiedomein-dynamica en ruimtelijk versterkte feature-modulatie
Helder zien onder de golven
De wereld onder de zee is van vitaal belang voor voedselzekerheid, energie en milieugezondheid, maar is ook moeilijk te overzien. Troebel water, zwevende deeltjes en zwak licht kunnen zelfs eenvoudige taken zoals het tellen van zeesterren of het controleren van pijpleidingen op de zeebodem verrassend lastig maken. Deze studie introduceert een nieuwe computervisie-methode die onderwaterrobots en camera’s helpt kleine zeedieren nauwkeuriger en sneller te detecteren, zelfs wanneer het zicht wazig of vertroebeld is.
Waarom onderwatervisies zo lastig is
In tegenstelling tot lucht buigt en verstrooit water licht, vooral de rode en gele golflengten waarop onze ogen vertrouwen voor contrast. Onderwaterfoto’s zien er vaak blauwgroen, wazig en detailarm uit, met felle terugverstrooiing van zwevende deeltjes. Kleine dieren zoals kokkels of zee-egels beslaan soms slechts een paar pixels in een afbeelding en kunnen makkelijk opgaan in rotsen, zand of zeewier. Traditionele detectiesoftware, oorspronkelijk ontworpen voor scherpe beelden op land, mist deze zwakke doelwitten vaak of verwart achtergrondruis met echte dieren. Tegelijkertijd draaien onderwaterrobots en sensoren meestal op beperkte hardware, dus de detectiemethode moet snel en lichtgewicht zijn, niet alleen nauwkeurig.
Een snellere manier om rumoerige beelden te lezen
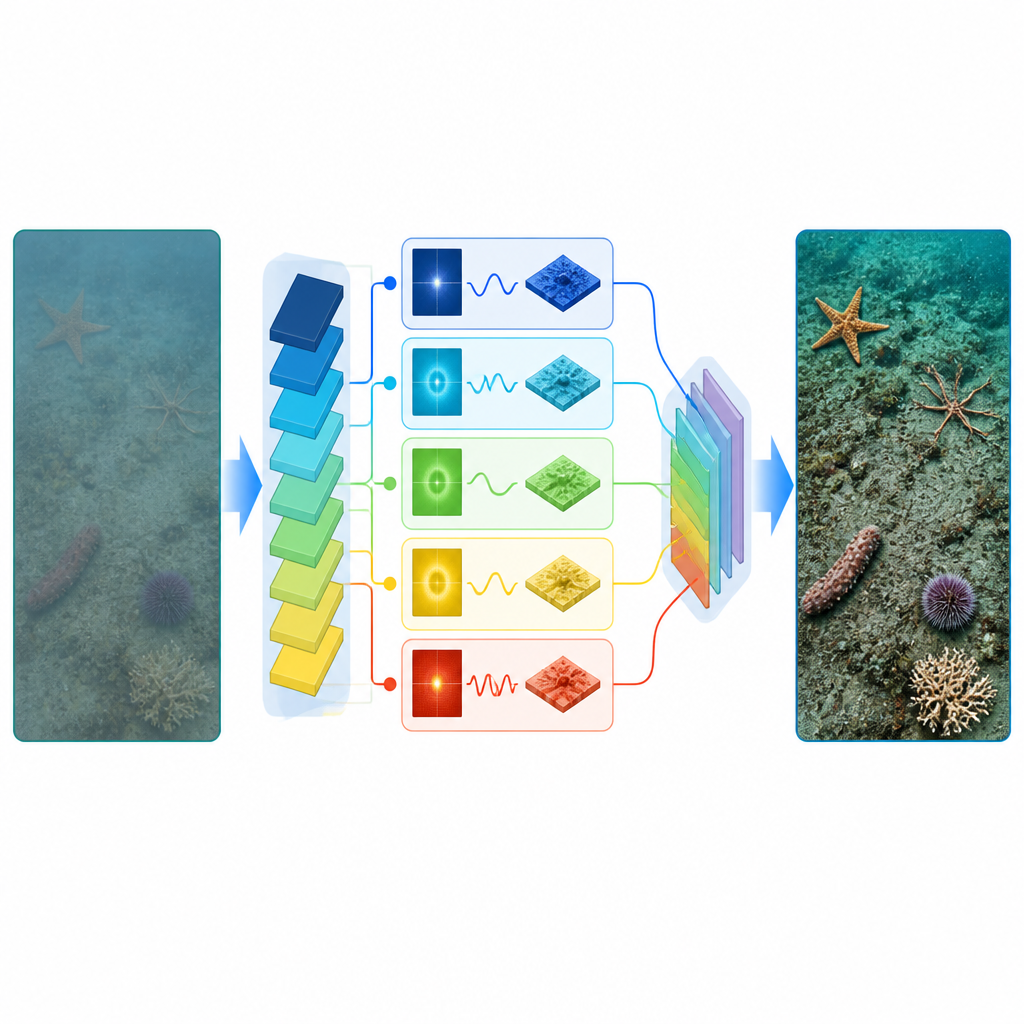
De auteurs bouwen voort op een recente modelfamilie bekend als Detection Transformers, die een afbeelding scannen door relaties tussen alle onderdelen te leren in plaats van met een klein venster over het beeld te schuiven. Hun variant behoudt de realtime-snelheid van een eerder systeem genaamd RT-DETR, maar vervangt de backbone door een nieuw ontwerp, FasterFDBlock, dat beter geschikt is voor rumoerige onderwaterscènes. Deze backbone combineert een truc genaamd partial convolution, die slechts een deel van de beeldkanalen verwerkt om tijd te besparen, met een frequentie-gebaseerde kijk op het beeld. Door in het frequentiedomein te werken kan het model willekeurige spikkelruis onderscheiden van scherpe randen die dieren omkaderen, de eerste dempen terwijl de laatste behouden blijven, en zo onnodige berekeningen verminderen.
Kleine dieren scherp houden
Diepe visienetwerken verliezen vaak fijne details naarmate ze een afbeelding herhaaldelijk verkleinen om hogere patronen te extraheren. Dat kan fataal zijn voor het vinden van kleine kokkels of zeesterren die al dicht bij de grens van zichtbaarheid zitten. Om dit tegen te gaan, herontwerpen de onderzoekers het kern-attentiemechanisme in de encoder en creëren wat zij AIFI-SEFN noemen. Simpel gezegd kijkt de ene tak van dit module naar het grote geheel met aandacht, terwijl een begeleidende tak zich focust op lokale textuur en vorm. Het poolt en vergroot features over schalen, gebruikt lichtgewicht convoluties om randen en patronen vast te leggen, en regelt vervolgens hoeveel van deze details wordt doorgelaten. Het resultaat is een rijkere mix van globale context en scherpe lokale structuur, zodat kleine dieren duidelijker afsteken tegen ruwe zeebodems en planten.
Informatie mengen over schalen
Onderwaterbeelden bevatten zelden objecten van één formaat; hetzelfde type organisme kan als een klein stipje op afstand of als een groot vlak op de voorgrond verschijnen. Eenvoudige manieren om informatie uit ondiepe en diepe lagen te fuseren, zoals het simpel optellen van feature-maps, kunnen kleine details verbergen onder sterke high-level signalen of ondiepe ruis het beeld laten overheersen. De nieuwe Multi-scale Feature Modulation-module pakt dit aan door eerst samen te vatten wat elke laag "ziet" via globale pooling, en daarna adaptieve gewichten toe te kennen aan semantische en gedetailleerde features per kanaal. Deze gewichten tellen altijd op tot één, dus het model moet kanaal voor kanaal beslissen of detail of brede context zwaarder weegt. Deze selectieve menging versterkt signalen van echte doelen en dempt afleidingen van rotsen, zand en schaduwen, zonder veel extra kosten toe te voegen.
Hoe goed werkt de methode
Het team testte hun aanpak op een uitdagende publieke dataset van onderwaterbeelden met zeekomkommers, zee-egels, kokkels en zeesterren, waarvan er veel klein, overlappend of deels verborgen zijn. Vergeleken met het oorspronkelijke RT-DETR-model verhoogde het nieuwe systeem de standaard detectiescore (mean Average Precision) van 70,4 naar 72,1 procent, terwijl het aantal parameters met meer dan een kwart werd verminderd en de rekenbelasting bijna een kwart afnam. Het draait nog steeds op meer dan 70 frames per seconde, snel genoeg voor realtimegebruik op gangbare grafische hardware. Visuele vergelijkingen van heatmaps en detectieresultaten tonen dat het verbeterde model daadwerkelijk aan dieren vastklampt, verwarrende texturen in rotsen en zeewier negeert, en meer kleine of laagcontrastdoelen terugwint in troebele of slecht verlichte scènes.
Wat dit betekent voor onderwaterwerk
In eenvoudige termen laat dit onderzoek zien hoe je een slank, snel model beter kunt laten zien in een van de moeilijkste visuele omgevingen op aarde. Door zorgvuldig te sturen hoe het netwerk omgaat met rumoerige frequenties, lokale details en features op verschillende schalen, maken de auteurs onderwaterobjectdetectie zowel nauwkeuriger als efficiënter. Die balans is belangrijk voor autonome onderwatervoertuigen en andere veldsystemen die snelle, betrouwbare beslissingen moeten nemen met beperkte rekenkracht. Naarmate deze methoden op meer datasets en ingebedde platforms worden toegepast, kunnen ze wetenschappers helpen marien leven te monitoren, ingenieurs bijstaan bij inspectie van onderwaterconstructies en robots met meer vertrouwen door complex zeebodemterrein navigeren.
Bronvermelding: Cai, S., Zhu, A. Real-time underwater object detection via frequency-domain dynamics and spatially enhanced feature modulation. Sci Rep 16, 14884 (2026). https://doi.org/10.1038/s41598-026-44628-9
Trefwoorden: onderwaterobjectdetectie, autonome onderwatervoertuigen, realtime visie, herkenning van kleine objecten, frequentiedomein-features