Clear Sky Science · ar
كشف الأشياء تحت الماء في الوقت الفعلي عبر ديناميكيات نطاق التردد وتعديلات الميزات المحسنة مكانياً
الرؤية بوضوح تحت الأمواج
العالم تحت البحر مهم للأمن الغذائي والطاقة والصحة البيئية، لكنه أيضاً يصعب رؤيته. يمكن أن تجعل المياه العكرة والجسيمات العائمة والضوء الخافت مهاماً بسيطة مثل عد نجوم البحر أو فحص الأنابيب على قاع البحر صعبة بشكل مفاجئ. تقدم هذه الدراسة طريقة جديدة في رؤية الحاسوب تساعد الروبوتات والكاميرات تحت الماء على اكتشاف الكائنات البحرية الصغيرة بدقة وسرعة أكبر، حتى عندما تكون الرؤية ضبابية أو معتمة.
لماذا الرؤية تحت الماء صعبة جداً
على خلاف الهواء، الماء يثني الضوء وينثره، خاصة الأحمر والأصفر اللذين نعتمد عليهما للتباين. الصور الملتقطة تحت الماء غالباً ما تبدو زرقاء-خضراء، ضبابية ومنخفضة التفاصيل، مع انعكاسات مضيئة من الجسيمات العائمة. الحيوانات الصغيرة مثل المحار أو قنافذ البحر قد تشغل بضعة بكسلات فقط في الصورة ويمكن أن تندمج بسهولة مع الصخور أو الرمال أو الأعشاب البحرية. برمجيات كشف الأشياء التقليدية، المصممة أصلاً للصور الحادة على الأرض، تميل إلى تفويت هذه الأهداف الخافتة أو تفسير فوضى الخلفية على أنها كائنات حقيقية. وفي الوقت نفسه، تعمل الروبوتات والمستشعرات تحت الماء غالباً على أجهزة محدودة، لذا يجب أن تكون طريقة الكشف سريعة وخفيفة الوزن، وليس فقط دقيقة.
طريقة أسرع لقراءة الصور المشوشة
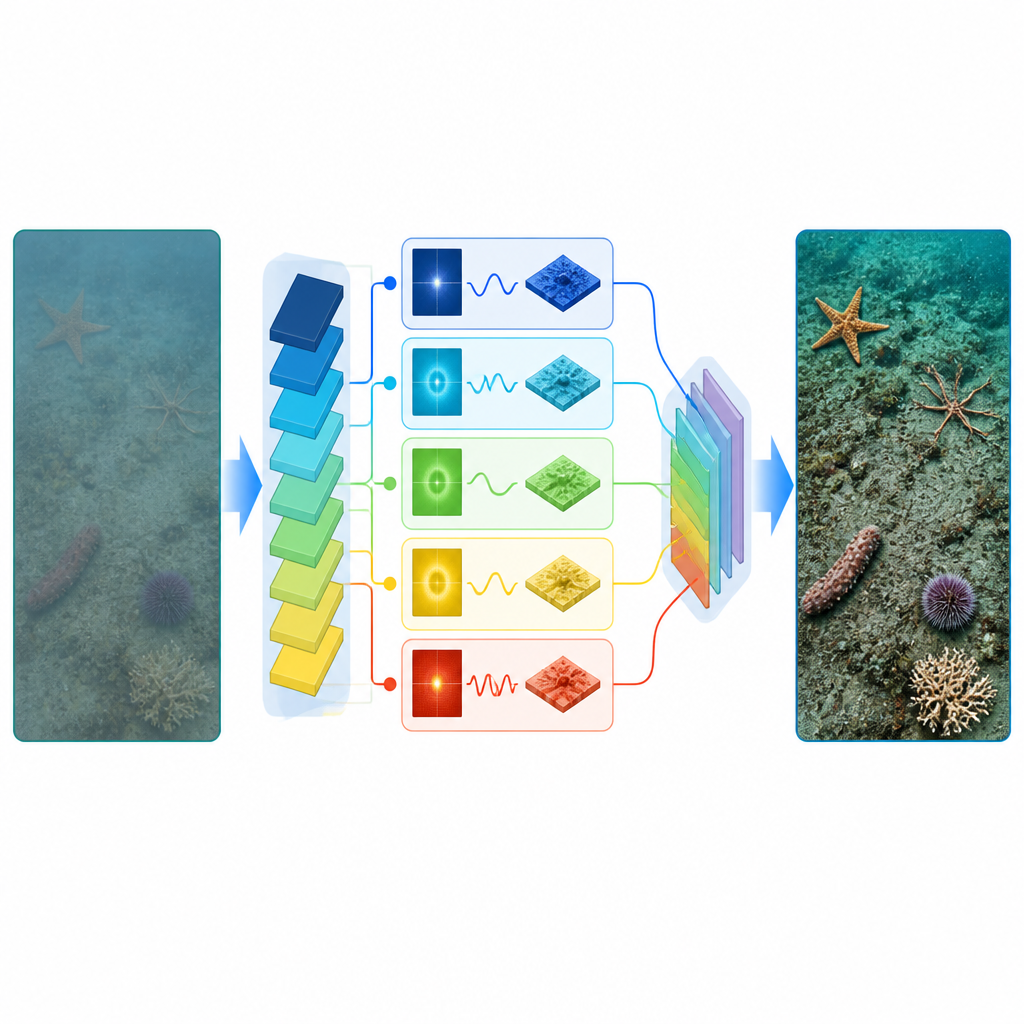
الباحثون يبنون على عائلة حديثة من النماذج تعرف باسم Detection Transformers، التي تفحص الصورة بتعلّم العلاقات بين كل أجزائها بدلاً من تحريك نافذة صغيرة فوقها. متغيرهم يحتفظ بسرعة الوقت الفعلي لنظام سابق اسمه RT-DETR لكنه يستبدل العمود الفقري بشيء جديد يسمى FasterFDBlock، وهو أنسب لمشاهد تحت الماء المشوشة. يجمع هذا العمود الفقري حيلة تسمى الالتفاف الجزئي (partial convolution) التي تعالج جزءاً من قنوات الصورة فقط لتوفير الوقت، مع منظور قائم على التردد للصورة. بالعمل في نطاق التردد، يمكن للنموذج تمييز الضوضاء العشوائية المنقطة عن الحواف الحادة التي تحدد الكائنات، مخففاً الأولى مع الحفاظ على الثانية وتقليلاً للحسابات الضائعة.
الحفاظ على صغائر الكائنات في بؤرة التركيز
غالباً ما تفقد الشبكات البصرية العميقة التفاصيل الدقيقة عندما تقلص الصورة مراراً لاستخراج أنماط على مستوى أعلى. قد يكون ذلك قاتلاً لاكتشاف المحار الصغير أو نجوم البحر التي تكاد تكون عند حافة الرؤية. لمواجهة ذلك، أعاد الباحثون تصميم كتلة الانتباه الأساسية في المشفر، مُنشئين ما يسميانه AIFI-SEFN. ببساطة، فرع واحد من هذا الوحدة ينظر إلى الصورة الكلية باستخدام الانتباه، بينما يركز فرع مرافق على النسيج المحلي والشكل. يجمع ويكبر الميزات عبر المقاييس، يستخدم التفافات خفيفة لالتقاط الحواف والأنماط، ثم يتحكم بكمية هذا التفصيل المسموح بمرورها. النتيجة مزيج أغنى من السياق العالمي والبنية المحلية الواضحة، بحيث تبرز الحيوانات الصغيرة بوضوح أكبر مقابل القيعان والطحالب الخشنة.
دمج المعلومات عبر المقاييس
نادراً ما تحتوي الصور تحت الماء على كائنات بحجم واحد فقط؛ قد يظهر نفس النوع من الكائن كإشارة صغيرة في الخلفية أو بقعة كبيرة في المقدمة. الطرق البسيطة لدمج المعلومات من الطبقات السطحية والعميقة، مثل جمع خرائط الميزات معاً، قد تطمس التفاصيل الصغيرة تحت إشارات عالية المستوى الثقيلة أو تسمح لضوضاء السطح أن تطغى على المشهد. تتعامل وحدة تعديل الميزات متعددة المقياس الجديدة مع هذا بتلخيص ما «تراه» كل طبقة أولاً عبر التجميع العالمي، ثم تعيين أوزان متكيفة للميزات الدلالية والتفصيلية لكل قناة. هذه الأوزان دائماً ما تجمع إلى واحد، لذلك يجب على النموذج أن يقرر قناة بقناة ما إذا كان التفصيل أو السياق الواسع هو الأهم. هذا الدمج الانتقائي يقوّي إشارات الأهداف الحقيقية ويخفّض المشتتات من الصخور والرمل والظلال، دون إضافة تكلفة كبيرة.
ما مدى فاعلية الطريقة
اختبر الفريق منهجهم على مجموعة بيانات عامة صعبة من صور تحت الماء تضم خيارات مثل خيار البحر، قنافذ البحر، المحار، ونجوم البحر، كثير منها صغير أو متداخل أو مخفي جزئياً. بالمقارنة مع نموذج RT-DETR الأصلي، رفعت النظام الجديد درجة الكشف المعيارية (متوسط الدقة) من 70.4 إلى 72.1 في المئة بينما خفض عدد المعاملات بأكثر من الربع وقلّلت كمية الحوسبة بنحو الربع أيضاً. ما زال يعمل بسرعة تزيد عن 70 إطاراً في الثانية، وهو سريع بما يكفي للاستخدام في الوقت الفعلي على أجهزة الرسوم الشائعة. تُظهر المقارنات البصرية لخرائط الحرارة ونتائج الكشف أن النموذج المحسّن يتركز على الحيوانات الحقيقية بشكل أوثق، ويتجاهل النسيج المربك في الصخور والطحالب، ويستعيد المزيد من الأهداف الصغيرة أو منخفضة التباين في المشاهد المعكرة أو الخافتة.
ماذا يعني هذا للعمل تحت الماء
بعبارة بسيطة، تُظهر هذه الأبحاث كيفية تعليم نموذج نحيف وسريع ليرى أفضل في أحد أصعب البيئات البصرية على الأرض. من خلال تشكيل كيفية تعامل الشبكة مع ترددات الضوضاء والتفاصيل المحلية والميزات عبر المقاييس، يجعل المؤلفون كشف الأشياء تحت الماء أكثر دقة وكفاءة في الوقت نفسه. هذا التوازن مهم للمركبات المائية الذاتية والأنظمة الميدانية الأخرى التي يجب أن تتخذ قرارات سريعة وموثوقة بقدرة حوسبة محدودة. ومع تكييف هذه الأساليب لمجموعات بيانات ومنصات مدمجة أكثر، قد تساعد العلماء على مراقبة الحياة البحرية، والمهندسين على فحص الهياكل تحت الماء، والروبوتات على التنقل في تضاريس قاع البحر المعقدة بثقة أكبر.
الاستشهاد: Cai, S., Zhu, A. Real-time underwater object detection via frequency-domain dynamics and spatially enhanced feature modulation. Sci Rep 16, 14884 (2026). https://doi.org/10.1038/s41598-026-44628-9
الكلمات المفتاحية: كشف الأشياء تحت الماء, المركبات المائية الذاتية, الرؤية في الوقت الفعلي, تمييز الأجسام الصغيرة, ميزات في نطاق التردد