Clear Sky Science · ja
周波数領域の動態と空間的に強化された特徴変調によるリアルタイム水中物体検出
波の下で鮮明に見る
海の中の世界は食料、安全保障、環境の健全性にとって重要ですが、視認は容易ではありません。濁った水、漂う粒子、暗い光などにより、ヒトデの数を数えたり海底のパイプを点検したりするような単純な作業でも意外に困難になります。本研究は、視界がぼやけたり濁ったりしている場合でも、水中ロボットやカメラが小さな海洋生物をより正確かつ迅速に検出できる新しいコンピュータビジョン手法を紹介します。
なぜ水中視覚は難しいのか
空気とは異なり水は光を屈折・散乱させ、特に赤や黄の波長を弱めてコントラストを損ないます。水中で撮影された画像は青緑がかり、霞んで詳細が乏しく、浮遊粒子による逆散乱で明るい斑点が生じることがよくあります。ホタテやウニのような小さな生物は画像中で数ピクセルしか占めないことがあり、岩や砂、海藻に埋もれて見えにくくなります。陸上の鮮明な画像向けに設計された従来の物体検出ソフトは、こうした微弱な対象を見落としたり背景の雑多な部分を誤って生物と判定したりしがちです。同時に、水中ロボットやセンサーは通常ハードウェア資源が限られているため、検出手法は正確であるだけでなく高速で軽量である必要があります。
ノイズの多い画像を速く読み取る方法
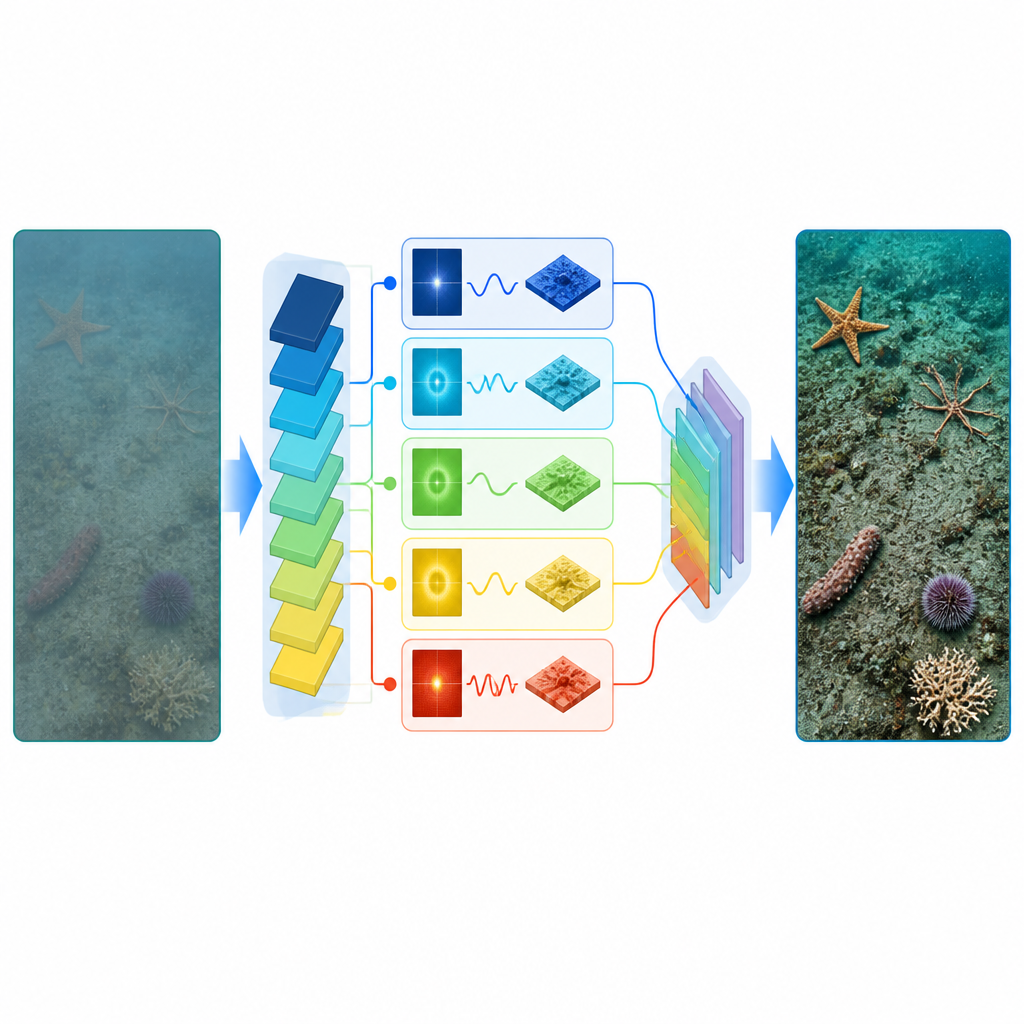
著者らは、画像の各部分間の関係を学習して全体を走査するDetection Transformersと呼ばれる近年のモデル群を基盤としています。彼らのバリアントはRT-DETRと呼ばれる先行システムのリアルタイム速度を維持しつつ、FasterFDBlockという新しいバックボーンを導入し、水中のノイズに適した設計に置き換えています。このバックボーンは、処理時間を節約するために画像チャネルの一部だけを扱う部分畳み込みという工夫と、画像を周波数領域で扱う視点を組み合わせています。周波数領域で処理することで、ランダムな斑点ノイズと生物の輪郭を示す鋭いエッジを識別し、前者を抑えつつ後者を保持して無駄な計算を削減できます。
小さな生物を見失わない工夫
深層ビジョンネットワークはしばしば、より高次のパターンを抽出するために画像を繰り返し縮小する過程で微細な情報を失います。それは既に視認限界近くにいる小さなホタテやヒトデの検出に致命的です。これに対処するため、研究者らはエンコーダ内の中核的な注意ブロックを再設計し、AIFI-SEFNと呼ぶモジュールを作りました。簡単に言えば、このモジュールの一方のブランチは注意機構で大域的な文脈を捉え、もう一方のブランチは局所のテクスチャや形状に注目します。特徴をスケール間でプーリングして拡張し、軽量な畳み込みでエッジやパターンを捉え、それらの詳細をどの程度通すかをゲーティングします。その結果、グローバルな文脈と鮮明な局所構造がより豊かに融合され、小さな生物が荒い海底や海藻の中でもよりはっきりと際立ちます。
異なるスケールの情報を融合する
水中画像には単一のサイズの対象しか含まれないことはほとんどなく、同種の生物が遠景では点のように小さく、前景では大きな斑点として現れることがあります。浅い層と深い層の情報を単純に足し合わせるだけでは、高次の強い信号により小さな詳細が埋もれたり、浅い層のノイズが場面を圧倒したりします。新しいマルチスケール特徴変調モジュールは、まず各層が「何を見ているか」をグローバルプーリングで要約し、次にチャネルごとに意味的特徴と詳細特徴に適応的な重みを割り当てます。これらの重みは常に合計が1になるため、モデルはチャネルごとに詳細が重要か広い文脈が重要かを判断します。この選択的な融合により、実際の対象からの信号を強化し、岩や砂、影などの気を散らす要素を抑えつつ、余分な計算コストをほとんど増やさずに済みます。
手法の有効性
チームは、ナマコ、ウニ、ホタテ、ヒトデなどを含み、多くが小さく重なり合ったり部分的に隠れたりしている挑戦的な公開水中画像データセットで手法を評価しました。元のRT-DETRモデルと比較して、新システムは標準的な検出指標(mean Average Precision)を70.4%から72.1%に向上させる一方で、パラメータ数を4分の1以上削減し、計算量も約4分の1削減しました。一般的なグラフィックスハードウェア上で実時間使用に十分な毎秒70フレーム以上で動作します。ヒートマップや検出結果の視覚比較では、改良モデルが実際の生物をより正確に捉え、岩や海藻の紋理による混乱を無視し、濁った環境や低照度シーンでの小さな低コントラスト対象もより多く回復していることが示されています。
水中作業への意義
日常的な観点から、この研究は、最も視覚的に困難な環境の一つである水中で、スリムで高速なモデルにより見え方を改善する方法を示しています。ネットワークがノイズ周波数、局所詳細、異なるスケールの特徴をどのように扱うかを慎重に設計することで、著者らは水中物体検出の精度と効率の両立を実現しました。このバランスは、限られた計算資源で迅速かつ信頼できる判断を下す必要のある自律型水中ビークルやその他の現場システムにとって重要です。これらの手法がより多くのデータセットや組み込みプラットフォームに適用されるにつれ、海洋生物のモニタリング、海中構造物の点検、ロボットによる複雑な海底地形の航行支援などに役立つ可能性があります。
引用: Cai, S., Zhu, A. Real-time underwater object detection via frequency-domain dynamics and spatially enhanced feature modulation. Sci Rep 16, 14884 (2026). https://doi.org/10.1038/s41598-026-44628-9
キーワード: 水中物体検出, 自律型水中ビークル, リアルタイムビジョン, 小物体認識, 周波数領域特徴