Clear Sky Science · es
Detección de objetos submarinos en tiempo real mediante dinámica en el dominio de la frecuencia y modulación espacialmente mejorada de características
Ver con claridad bajo las olas
El mundo bajo el mar es vital para la seguridad alimentaria, la energía y la salud ambiental, pero también es difícil de ver. El agua turbia, las partículas en suspensión y la luz tenue pueden dificultar incluso tareas simples como contar estrellas de mar o revisar tuberías en el lecho marino. Este estudio presenta un nuevo método de visión por computador que ayuda a robots y cámaras submarinas a detectar pequeños animales marinos con mayor precisión y rapidez, incluso cuando la vista está borrosa o nublada.
Por qué la visión submarina es tan difícil
A diferencia del aire, el agua dobla y dispersa la luz, especialmente los rojos y amarillos que nuestros ojos usan para el contraste. Las imágenes tomadas bajo el agua a menudo se ven azul verdosas, nebulosas y con pocos detalles, con retrodispersión brillante causada por partículas flotantes. Los animales pequeños, como vieiras o erizos de mar, pueden ocupar solo unos pocos píxeles en una imagen y fundirse fácilmente con rocas, arena o algas. El software tradicional de detección de objetos, diseñado originalmente para imágenes nítidas en tierra, tiende a pasar por alto estos objetivos tenues o a confundir el ruido de fondo con animales reales. Al mismo tiempo, los robots y sensores submarinos suelen funcionar con hardware limitado, por lo que el método de detección debe ser rápido y ligero, además de preciso.
Una forma más rápida de interpretar imágenes ruidosas
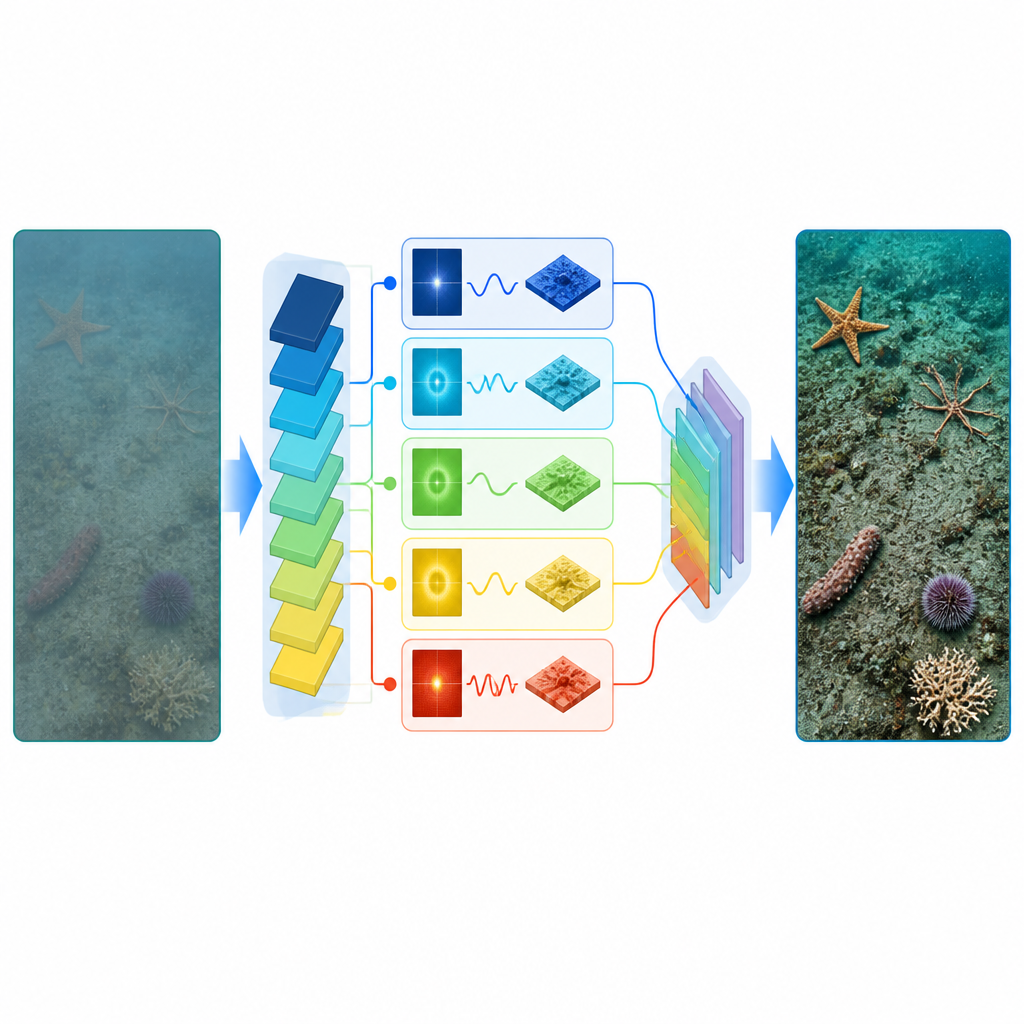
Los autores se basan en una familia reciente de modelos conocidos como Detection Transformers, que analizan una imagen aprendiendo relaciones entre todas sus partes en lugar de deslizar una pequeña ventana sobre ella. Su variante mantiene la velocidad en tiempo real de un sistema anterior llamado RT-DETR pero sustituye el backbone por uno nuevo, llamado FasterFDBlock, mejor adaptado a escenas submarinas ruidosas. Este backbone combina un recurso llamado convolución parcial, que procesa solo una fracción de los canales de la imagen para ahorrar tiempo, con una visión basada en la frecuencia de la imagen. Al trabajar en el dominio de la frecuencia, el modelo puede distinguir el ruido salpicado aleatorio de los bordes nítidos que delinean a los animales, atenuando el primero mientras preserva el segundo y reduciendo el cómputo innecesario.
Mantener los animales pequeños enfocados
Las redes profundas de visión a menudo pierden el detalle fino a medida que reducen repetidamente una imagen para extraer patrones de alto nivel. Eso puede ser fatal para detectar pequeñas vieiras o estrellas de mar que ya están al borde de la visibilidad. Para combatir esto, los investigadores rediseñan el bloque de atención central del codificador, creando lo que llaman AIFI-SEFN. En términos sencillos, una rama de este módulo observa el panorama general usando atención, mientras que una rama compañera se centra en la textura y la forma local. Agrupa y amplía características a través de escalas, usa convoluciones ligeras para capturar bordes y patrones, y luego regula cuánto de ese detalle se deja pasar. El resultado es una mezcla más rica de contexto global y estructura local nítida, de modo que los animales pequeños destacan con más claridad sobre lechos marinos agrestes y plantas.
Fusionar información a través de escalas
Las imágenes submarinas rara vez contienen objetos de un solo tamaño; el mismo tipo de organismo puede aparecer como un punto diminuto a lo lejos o como un parche grande en primer plano. Formas simples de fusionar información de capas poco profundas y profundas, como sumar mapas de características, pueden enterrar detalles pequeños bajo señales de alto nivel o permitir que el ruido superficial abrume la escena. El nuevo módulo de Modulación de Características Multiescala aborda esto resumiendo primero lo que cada capa "ve" mediante un pooling global, y luego asignando pesos adaptativos a las características semánticas y detalladas para cada canal. Estos pesos siempre suman uno, de modo que el modelo debe decidir, canal por canal, si importa más el detalle o el contexto amplio. Esta mezcla selectiva fortalece las señales de objetivos reales y atenúa las distracciones de rocas, arena y sombras, sin añadir mucho coste extra.
Qué tan bien funciona el método
El equipo probó su enfoque en un conjunto de datos público desafiante de imágenes submarinas que incluye pepinos de mar, erizos, vieiras y estrellas de mar, muchos de ellos pequeños, superpuestos o parcialmente ocultos. En comparación con el RT-DETR original, el nuevo sistema elevó la puntuación estándar de detección (mean Average Precision) del 70,4 al 72,1 por ciento, reduciendo además el número de parámetros en más de una cuarta parte y disminuyendo la cantidad de cómputo en casi una cuarta parte. Sigue funcionando a más de 70 fotogramas por segundo, lo suficientemente rápido para uso en tiempo real en hardware gráfico típico. Comparaciones visuales de mapas de calor y resultados de detección muestran que el modelo mejorado se centra más en los animales reales, ignora texturas confusas en rocas y algas, y recupera más objetivos diminutos o de bajo contraste en escenas turbias o con poca luz.
Qué significa esto para el trabajo submarino
En términos cotidianos, esta investigación muestra cómo enseñar a un modelo esbelto y rápido a ver mejor en uno de los entornos visuales más difíciles de la Tierra. Al moldear cuidadosamente cómo la red maneja frecuencias ruidosas, detalle local y características a distintas escalas, los autores hacen que la detección de objetos submarinos sea a la vez más precisa y más eficiente. Ese equilibrio es importante para vehículos submarinos autónomos y otros sistemas de campo que deben tomar decisiones rápidas y fiables con potencia de cálculo limitada. A medida que estos métodos se adapten a más conjuntos de datos y plataformas embebidas, podrían ayudar a científicos a monitorizar la vida marina, a ingenieros a inspeccionar estructuras submarinas y a robots a navegar con mayor confianza por terrenos complejos del lecho marino.
Cita: Cai, S., Zhu, A. Real-time underwater object detection via frequency-domain dynamics and spatially enhanced feature modulation. Sci Rep 16, 14884 (2026). https://doi.org/10.1038/s41598-026-44628-9
Palabras clave: detección de objetos submarinos, vehículos submarinos autónomos, visión en tiempo real, reconocimiento de objetos pequeños, características en el dominio de la frecuencia