Clear Sky Science · zh
用自主机器人击败精英乒乓球选手
机器人走上体育舞台
想象一下在乒乓球桌对面面对一台机器人,发现它不仅能与你来回对打——还能击败经验丰富的选手。本文介绍了Ace,一台能达到人类精英运动员水平的自主乒乓机器人。除了作为一个酷炫的体育装置外,Ace 还让我们瞥见了这样的未来:机器在日常环境中处理与人之间的高速、身体互动,从工厂到家庭助理都可能实现。

为什么乒乓是一个苛刻的考验
乒乓球比电视上看起来要难得多。在高水平比赛中,球速可超过每秒20米,选手在回球之间有时不到半秒的时间去观察、决策和移动。除了速度外,球的旋转——快速自转——会弯曲其在空中的轨迹,并改变它与球台和球拍碰撞后的反弹方式。旋转速度可超过每秒1000弧度,使得来球出现弯曲或在落台后难以预测的弹跳。早期的乒乓机器人通过从简单装置发球、使用更小的场地,或在很大程度上忽略旋转来避开这些复杂性。Ace 则迎接真实比赛的全部挑战,使用标准器材并遵守正式规则进行对抗。
实时观察高速移动的球
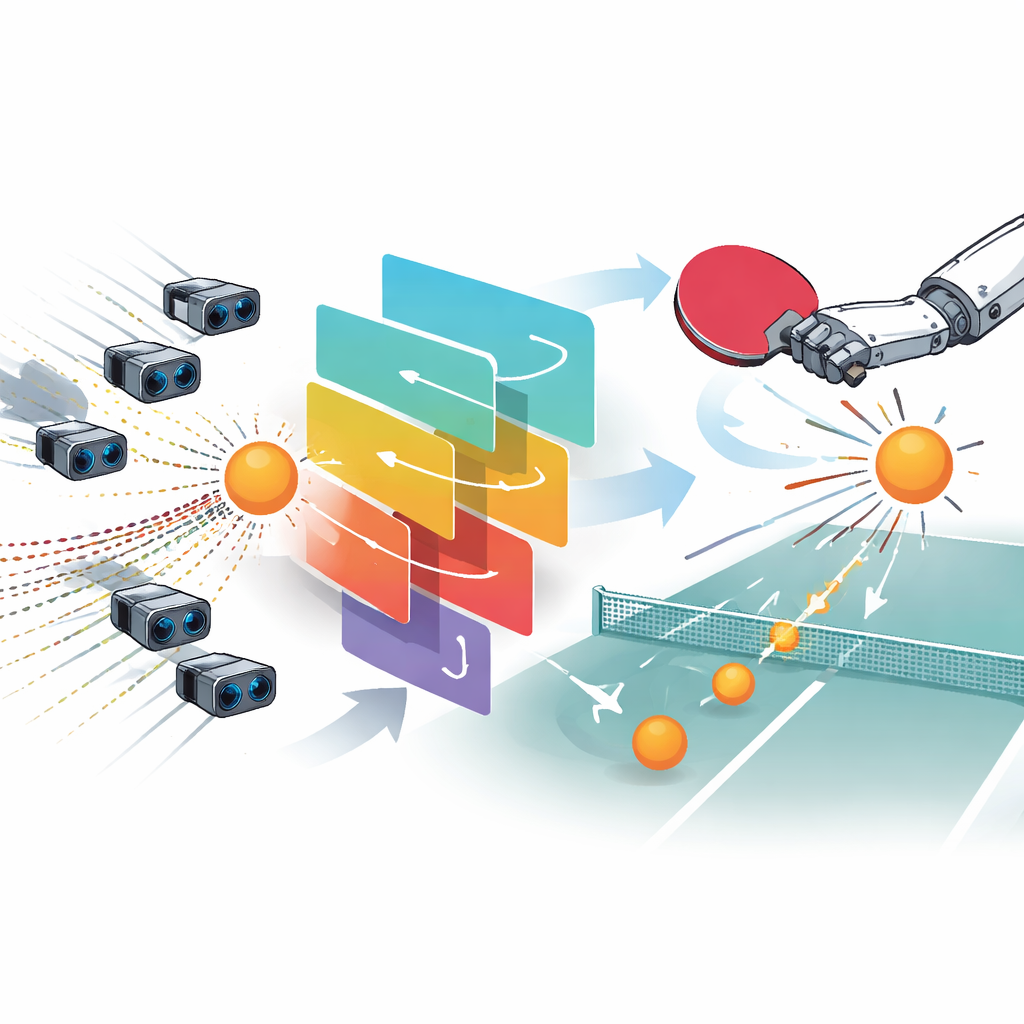
为应对如此高速,Ace 需要出色的视觉系统。该系统在一个奥运场地周围布置了九台常规相机,以在三维空间追踪球的位置。这些相机以约每秒200次的频率测量球的位置,精度达到毫米级,延迟仅为几千分之一秒。然而,仅有位置还不够。旋转在严肃比赛中至关重要,因此 Ace 还使用了三个专门的“视线控制”单元,每个单元结合了一台高速基于事件的传感器、偏转镜和长焦镜头。这类传感器不是录制完整图像,而是记录每个像素亮度的变化,生成捕捉运动的微小“事件”流,带来极低的运动模糊。将这些事件送入神经网络和第二个更精确的算法后,Ace 能以每秒数百次的频率估计球的旋转速度和方向。系统融合这些测量,并在任一时刻选择最佳估计,交给决定机器人如何移动的控制软件。
机器人如何选择与执行击球
Ace 的“头脑”由一组使用深度强化学习学到的控制策略构成,这种方法通过虚拟的试错不断改进软件。在仿真中,机器人反复练习回接单次来球,受奖励信号引导,该信号偏好成功回球及某些特性,比如强力上旋或精确的落点。训练程序中的一个巧妙设计允许学习算法在幕后使用完美的仿真信息,而策略本身只看到有噪声的、真实感的传感器读数,帮助策略顺利迁移到现实世界。在来回中,每32毫秒 Ace 会收到更新的球和机器人状态历史,选择若干学得的“技能”之一,并输出一个抽象动作。该动作随后由优化例程转换为详细且平滑的关节轨迹,遵守速度限制并避免与球台或机器人本体发生碰撞。同时,另一个规划器不断准备一个安全的“复位”动作,以便机械臂能快速恢复并为下一次击球做好准备。
为竞技设计的定制机体
为了匹配人类的敏捷性,团队设计了一台具有八个关节的专用机械臂——两个滑动关节和六个旋转关节——提供足够的自由度来定位、角度调整并像熟练运动员那样挥动球拍。机械臂由轻量且坚固的金属结构构成,经过计算机算法优化并采用增材制造,允许快速运动而不丧失刚性。机械臂末端配备了符合规定的球拍和一个小杯,用于单臂发球时容纳球,这符合官方规则允许的适配。所有执行器同步以每毫秒响应一次,视觉系统也保持相同的时序,使感知与动作紧密协调。在最低层面,机器人表现出简单且可预测的行为,即使在最高速度下延迟也被控制在几毫秒,这对于接住在数分之一秒内到达的来球至关重要。
Ace 对阵人类专家的表现
研究人员在2025年4月对 Ace 进行了测试,对手包括五名精英选手——具有十年以上集训经验的资深竞赛者——以及两名来自日本顶级联赛的职业选手。比赛遵循国际规则,使用标准球台、球网和球,并由持证裁判执裁。Ace 与精英组进行三局两胜制比赛,与职业选手进行五局三胜制。它在对阵精英选手的五场比赛中赢得了三场,并从一位职业选手手中拿下一局。比赛记录显示,Ace 能可靠地回击约每秒14米的来球,并在相当大的旋转范围内保持超过75%的回球率。与人类相比,Ace 并不依赖特别快的来球来赢得得分。相反,它“赢下”的回球在速度和旋转上与其常规回球相似,这表明其主要优势是稳定性——一次又一次把球回到球台上。该机器人也倾向于在球落地后更快地击球,而且其精心设计的发球比精英选手的回发更常直接得分,即“ace”。
超越乒乓球桌的意义
Ace 表明,不仅仅是计算机程序,一台具备物理形体的机器人现在也能在不简化规则的高速互动运动中挑战人类专家。对非专业读者而言,关键不仅在于机器能打出令人印象深刻的乒乓球,而在于快速感知、学习决策与灵活硬件的组合能够在接近人类反应极限的现实任务中发挥作用。相同的技术最终可帮助机器人在工厂车间与人并肩安全工作、辅助设备与使用者动作协调,或为运动训练提供此前无法实现的挑战。尽管对人类策略和长期战术建模仍是个挑战,Ace 代表了迈向能在我们的空间中与我们实时互动的物理人工智能系统的重要一步。
引用: Dürr, P., El Gheche, M., Maeda, G.J. et al. Outplaying elite table tennis players with an autonomous robot. Nature 652, 886–891 (2026). https://doi.org/10.1038/s41586-026-10338-5
关键词: 机器人乒乓球, 物理人工智能, 强化学习, 基于事件的视觉, 人机交互