Clear Sky Science · it
Superare giocatori di ping‑pong d’élite con un robot autonomo
I robot salgono sul palco sportivo
Immaginate di avere di fronte a voi, dall’altra parte di un tavolo da ping‑pong, un robot e scoprire che non si limita a scambiare colpi: può battere avversari esperti. Questo articolo presenta Ace, un robot autonomo da ping‑pong che gioca al livello di atleti umani d’élite. Oltre a essere un gadget sportivo sorprendente, Ace offre uno sguardo su un futuro in cui le macchine gestiscono interazioni fisiche rapidissime con le persone in contesti quotidiani, dalle fabbriche agli assistenti domestici.

Perché il ping‑pong è una prova difficile
Il ping‑pong è molto più impegnativo di quanto possa sembrare in televisione. Nel gioco ad alto livello la pallina può viaggiare a oltre 20 metri al secondo, e i giocatori a volte hanno meno di mezzo secondo tra un colpo e l’altro per vedere, decidere e muoversi. Oltre alla velocità, lo spin — la rotazione rapida della pallina — curva la traiettoria nell’aria e modifica il rimbalzo sul tavolo e sulla racchetta. Le rotazioni possono superare i 1.000 radianti al secondo, facendo svirgolare i colpi o farli rimbalzare in modi difficili da prevedere. Robot da ping‑pong precedenti evitavano gran parte di questa complessità lanciando palline da macchine semplici, usando campi ridotti o ignorando in buona parte lo spin. Ace invece affronta la sfida completa delle partite reali giocate con attrezzatura standard e regole ufficiali.
Vedere una pallina in rapido movimento in tempo reale
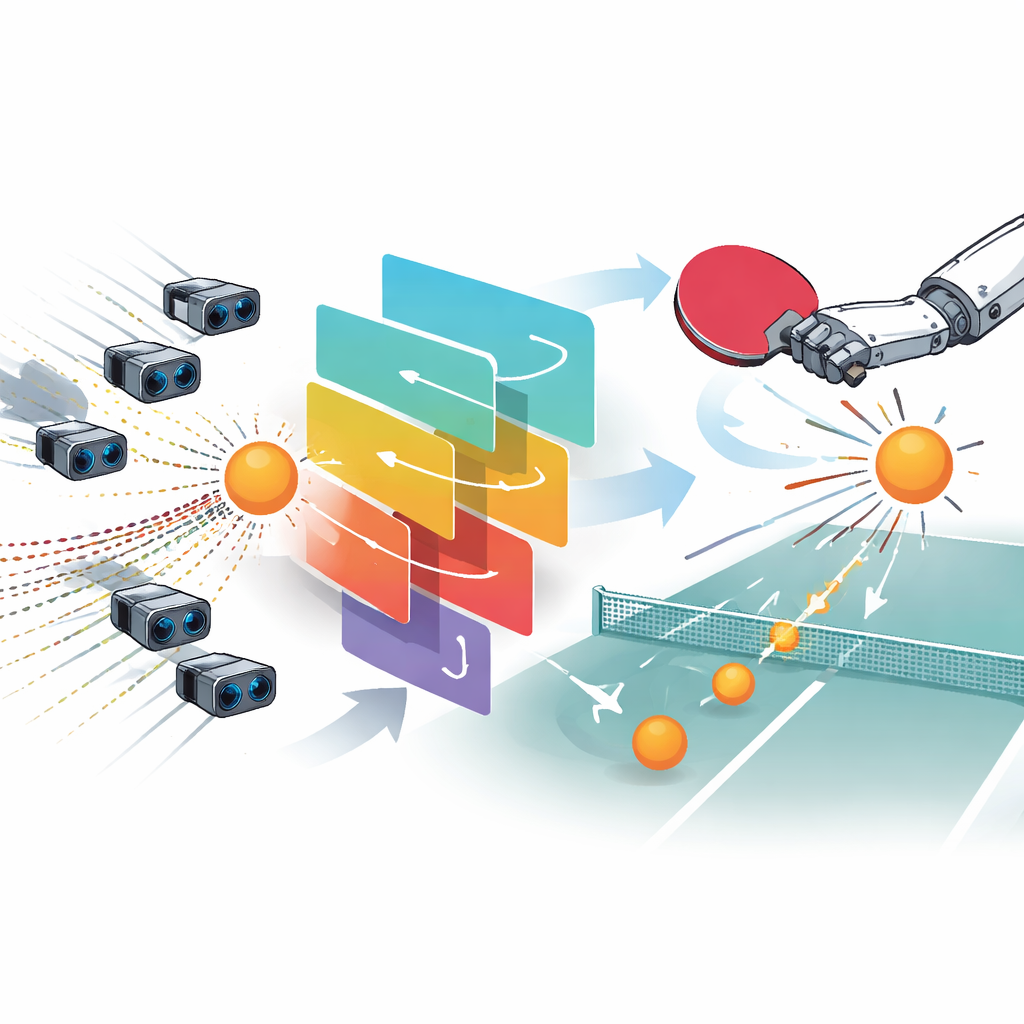
Per gestire tali velocità, Ace richiede una visione eccezionale. Il sistema utilizza nove telecamere convenzionali posizionate attorno a un campo dalle dimensioni olimpiche per tracciare la pallina in tre dimensioni. Queste telecamere misurano la posizione della pallina circa 200 volte al secondo con precisione millimetrica e ritardi di appena qualche millesimo di secondo. Tuttavia la posizione da sola non basta. Lo spin è fondamentale nel gioco serio, quindi Ace impiega anche tre unità specializzate di “controllo dello sguardo”, ognuna delle quali combina un sensore event‑based ad alta velocità, specchi orientabili e un obiettivo tele. Invece di registrare immagini complete, questi sensori annotano solo i cambiamenti di luminosità per pixel, producendo flussi di piccoli “eventi” che catturano il movimento con sfocatura estremamente ridotta. Alimentando questi eventi in una rete neurale e in un secondo algoritmo più preciso, Ace stima quanto velocemente e in quale direzione ruota la pallina fino a diverse centinaia di volte al secondo. Il sistema fonde queste misure, scegliendo la stima migliore in ogni istante, e le passa al software di controllo che decide come il robot deve muoversi.
Come il robot sceglie ed esegue i suoi colpi
Il “cervello” di Ace è costituito da un insieme di politiche di controllo apprese con l’apprendimento profondo per rinforzo, un metodo in cui il software migliora attraverso prove virtuali ed errori. In simulazione il robot si esercita ripetutamente nel restituire singoli colpi, guidato da un segnale di ricompensa che privilegia rimbalzi riusciti con caratteristiche specifiche come un forte topspin o punti di atterraggio precisi. Un espediente intelligente nella procedura di addestramento permette all’algoritmo di apprendimento di usare dietro le quinte informazioni simulate perfette mentre le politiche stesse vedono solo letture sensoriali realistiche e rumorose, aiutando il trasferimento al mondo reale. Durante lo scambio, ogni 32 millisecondi Ace riceve una cronologia aggiornata degli stati della pallina e del robot, seleziona una delle varie “abilità” apprese e produce un’azione astratta. Questa azione viene poi convertita da una routine di ottimizzazione in una traiettoria articolare dettagliata e fluida che rispetta limiti di velocità ed evita collisioni con il tavolo o con lo stesso robot. In parallelo, un altro pianificatore prepara costantemente un movimento di “reimpostazione” sicuro in modo che il braccio possa recuperare rapidamente ed essere pronto per il colpo successivo.
Un corpo costruito su misura per il gioco atletico
Per eguagliare l’agilità umana, il team ha progettato un braccio robotico dedicato con otto giunti — due giunti scorrevoli e sei rotativi — che offrono la libertà necessaria per posizionare, inclinare e oscillare la racchetta come un atleta esperto. Il braccio è realizzato con strutture metalliche leggere e resistenti ottimizzate da algoritmi e prodotte con manifattura additiva, consentendo movimenti rapidi senza perdere rigidità. L’estremità del braccio porta una racchetta regolamentare e una piccola coppa che tiene la pallina per i servizi a braccio singolo, coerente con le adattazioni consentite dalle regole ufficiali. Tutti gli attuatori sono sincronizzati per rispondere ogni millisecondo, e il sistema di visione condivide lo stesso timing, mantenendo senso e movimento strettamente coordinati. Al livello più basso, il robot si comporta in modo semplice e prevedibile, con ritardi mantenuti a pochi millisecondi anche alla massima velocità, cosa cruciale per colpire palline che arrivano in frazioni di secondo.
Come si è comportato Ace contro esperti umani
I ricercatori hanno testato Ace nell’aprile 2025 contro cinque giocatori d’élite — avversari esperti con oltre un decennio di allenamento intensivo — e due professionisti della massima serie giapponese. Le partite hanno seguito le regole internazionali, con tavoli, reti e palline standard, e sono state giudicate da arbitri autorizzati. Ace ha giocato al meglio delle tre partite contro il gruppo d’élite e al meglio delle cinque contro i professionisti. Ha vinto tre delle cinque sfide contro i giocatori d’élite e ha conquistato un set contro uno dei professionisti. I dati registrati durante il gioco mostrano che Ace restituisce con affidabilità colpi fino a circa 14 metri al secondo e gestisce un’ampia gamma di spin con percentuali di risposta superiori al 75 percento fino a livelli di rotazione considerevoli. Rispetto agli umani, Ace non fa affidamento su colpi particolarmente veloci per vincere i punti. Piuttosto, i suoi colpi “vincenti” hanno velocità e spin simili ai suoi normali rimbalzi, suggerendo che la coerenza — riportare la pallina sul tavolo ancora e ancora — sia la sua forza principale. Il robot tende anche a colpire la pallina prima dopo il rimbalzo, e i suoi servizi, progettati con cura, producono più punti diretti, o “ace”, contro i giocatori d’élite di quanto riescano a ottenere gli umani in risposta.
Cosa significa tutto questo oltre il tavolo da ping‑pong
Ace dimostra che un robot fisico, non solo un programma informatico, può ora sfidare esperti umani in uno sport interattivo e rapido senza semplificare le regole. Per i non specialisti, la conclusione chiave non è soltanto che una macchina può giocare un ping‑pong impressionante; è che la combinazione di percezione rapidissima, decisioni apprese e hardware agile può affrontare compiti del mondo reale ai limiti dei tempi di reazione umani. Le stesse tecniche potrebbero infine aiutare robot a lavorare in sicurezza accanto alle persone nei reparti di produzione, dispositivi assistivi a coordinarsi coi movimenti degli utenti, o nuovi strumenti di allenamento sportivo a spingere gli atleti in modi prima impossibili. Sebbene modellare la strategia umana e le tattiche a lungo termine rimanga una sfida, Ace rappresenta un passo importante verso sistemi di intelligenza artificiale fisica che possono condividere i nostri spazi e rispondere a noi in tempo reale.
Citazione: Dürr, P., El Gheche, M., Maeda, G.J. et al. Outplaying elite table tennis players with an autonomous robot. Nature 652, 886–891 (2026). https://doi.org/10.1038/s41586-026-10338-5
Parole chiave: robot ping pong, intelligenza artificiale fisica, apprendimento per rinforzo, visione basata su eventi, interazione uomo‑robot