Clear Sky Science · ar
التفوّق على لاعبي تنس الطاولة النخبة بروبوت مستقل
الروبوتات تدخل ساحة الرياضة
تخيّل أن تواجه روبوتاً عبر مائدة تنس الطاولة وتكتشف أنه لا يكتفي بالمبادلة معك—بل يمكنه هزيمة منافسين متمرسين. يقدم هذا المقال "آيس"، روبوت تنس طاولة مستقل يلعب بمستوى رياضيين بشريين نخبويين. وما يتجاوز كونه جهازاً رياضياً مثيراً، فإن آيس يمنح لمحة عن مستقبل تتعامل فيه الآلات مع تفاعلات جسدية سريعة للغاية مع البشر في مواقف يومية، من المصانع إلى المساعدين المنزليين.

لماذا يعد تنس الطاولة اختباراً صعباً
تنس الطاولة أصعب بكثير مما قد يبدو على شاشة التلفزيون. في اللعب عالي المستوى، قد تسير الكرة بسرعة تزيد عن 20 متراً في الثانية، وأحياناً يكون لدى اللاعبين أقل من نصف ثانية بين الضربات للرؤية، واتخاذ القرار، والتحرك. بالإضافة إلى السرعة، يدفع الدوران—الدوران السريع للكرة—مسارها في الهواء ويغير كيفية ارتدادها عن الطاولة والمضرب. قد تتجاوز السرعات الدورانية ألف راديان في الثانية، مما يجعل الضربات تنحرف أو ترتد عن الطاولة بطرق يصعب التنبؤ بها. تجنّبت روبوتات تنس الطاولة السابقة الكثير من هذه التعقيدات عن طريق إطلاق الكرات من آلات بسيطة، أو استخدام مساحات ملعب أصغر، أو تجاهل الدوران إلى حد كبير. أما آيس فيواجه التحدي الكامل للمباريات الحقيقية التي تُلعب بمعدات معيارية وقوانين رسمية.
رؤية كرة سريعة الحركة في الزمن الحقيقي
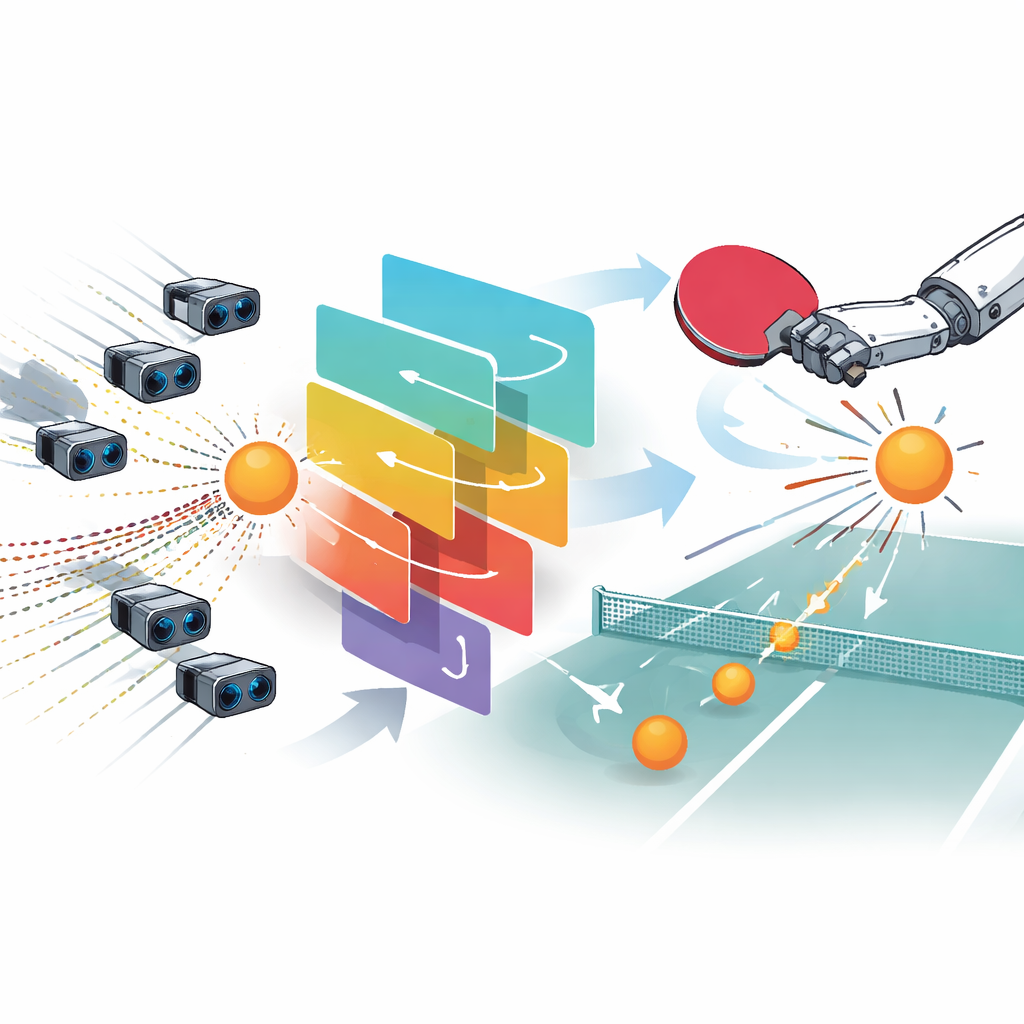
لمواجهة هذه السرعات، يحتاج آيس إلى رؤية استثنائية. يستخدم النظام تسع كاميرات تقليدية موضوعة حول ملعب مقاس أولمبي لتتبع الكرة في ثلاثة أبعاد. تقيس هذه الكاميرات موضع الكرة نحو 200 مرة في الثانية بدقة مليمترية وتأخير لا يتجاوز بضعة آلاف من الثانية. ومع ذلك، الموضع وحده غير كافٍ. الدوران حاسم في اللعب الجاد، لذا يوظف آيس أيضاً ثلاث وحدات متخصصة للتحكم في التوجيه، كل منها يجمع بين مستشعر حدثي عالي السرعة، ومرايا توجيه، وعدسة تليفوتوغرافية. بدلاً من تسجيل صور كاملة، تسجل هذه المستشعرات التغيّرات في السطوع عند كل بكسل فقط، فتنتج تيارات من "الأحداث" الصغيرة التي تلتقط الحركة بطمس منخفض للغاية. من خلال تغذية هذه الأحداث إلى شبكة عصبية وخوارزمية ثانية أكثر دقة، يقدّر آيس مدى سرعة اتجاه دوران الكرة وباتجاه أيٍّ من عدة مئات من المرات في الثانية. يمزج النظام بين هذه القياسات، فيختار أفضل تقدير في أي لحظة، وينقلها إلى برنامج التحكم الذي يقرر كيف ينبغي للروبوت أن يتحرك.
كيف يختار الروبوت ضرباته وينفّذها
تتكوّن "عقلية" آيس من مجموعة سياسات تحكم تُتعلم عبر التعلّم العميق بالمكافأة، وهي طريقة يتحسّن فيها البرنامج من خلال المحاكاة والتجربة الافتراضية والخطأ. في المحاكاة، يتدرّب الروبوت مراراً على ردّ ضربات فردية، موجهًا بإشارة مكافأة تفضّل الردود الناجحة ذات خصائص محددة مثل دوران علوي قوي أو أماكن هبوط دقيقة. تتيح خدعة ذكية في إجراء التدريب للخوارزمية أن تستخدم معلومات محاكاة مثالية سرّية بينما ترى السياسات نفسها قراءات حسّية واقعية ومشوشة فقط، مما يساعدها على الانتقال بسلاسة إلى العالم الحقيقي. أثناء التبادل، كل 32 مللي ثانية يتلقى آيس تاريخاً محدثاً لحالات الكرة والروبوت، يختار إحدى "المهارات" المتعلمة، وينتج فعلًا مجردًا. ثم تُحوَّل هذه الفعلية بواسطة روتين تحسين إلى مسار مفصلي مفصّل وسلس يحترم حدود السرعة ويتجنب الاصطدام بالطاولة أو بالروبوت نفسه. وبالتوازي، يُحضّر مخطط آخر باستمرار حركة "إعادة ضبط" آمنة حتى يتمكن الذراع من التعافي بسرعة والاستعداد للضربة التالية.
هيكل مخصص للعب الرياضي
لمجاراة خفة حركة البشر، صممت الفريق ذراع روبوت مكرَّسة ذات ثمانية مفاصل—مفصلان انزلاقيان وستة دوّاران—مما يوفر حرية كافية لوضع المضرب بزاوية وتأرجحه مثل رياضي ماهر. الذراع مصنوعة من هياكل معدنية خفيفة وقوية محسّنة بواسطة خوارزميات حاسوبية ومُصنَّعة بالطباعة ثلاثية الأبعاد، مما يتيح حركة سريعة دون فقدان الصلادة. يحمل طرف الذراع مضرباً مطابقاً للوائح وكوباً صغيراً يحجز الكرة لخدمات ذراع واحدة، بما يتوافق مع التعديلات المسموح بها في القوانين الرسمية. تتزامن جميع المحركات لتستجيب كل مللي ثانية، ويشارك نظام الرؤية نفس التوقيت، محافظاً على تنسيق محكم بين الاستشعار والحركة. على أدنى مستوى، يتصرف الروبوت بطريقة بسيطة ومتوقعة، مع إبقاء التأخيرات عند بضعة مللي ثانية حتى في أعلى سرعاته، وهو أمر حاسم لضرب كرات تصل في كسور من الثانية.
أداء آيس ضد الخبراء البشر
اختبر الباحثون آيس في أبريل 2025 ضد خمسة لاعبين نخبويين—منافسين ذوي خبرة تزيد على عقد من التدريب المكثف—ومحترفَين من الدوري الياباني الأعلى. اتبعت المباريات القواعد الدولية، باستخدام طاولات وشبكات وكرات معيارية، وتقدير حكام مرخّصين. لعب آيس مباريات من الأفضل من ثلاث ضد مجموعة النخبة ومن الأفضل من خمس ضد المحترفين. فاز بثلاث من أصل خمسة مباريات ضد اللاعبين النخبويين ونجح في أخذ شوط من أحد المحترفين. تُظهر البيانات المسجلة أثناء اللعب أن آيس يعيد الضربات باستقرار حتى نحو 14 متراً في الثانية ويتعامل مع طيف واسع من الدورانات بمعدلات رد تزيد عن 75 بالمئة حتى مستويات دوران معتبرة. مقارنةً بالبشر، لا يعتمد آيس على ضربات أسرع بشكل خاص لكسب النقاط. بدلاً من ذلك، تبدو الضربات "الفائزة" لديه مشابهة من حيث السرعة والدوران لردوده العادية، مما يوحي أن الاتساق—إعادة الكرة إلى الطاولة مراراً—هو قوته الأساسية. كما أن الروبوت يميل إلى ضرب الكرة بسرعة أكبر بعد ارتدادها، وخدماته المصممة بعناية تنتج نقاطاً مباشرة أكثر، أو "إيسات"، ضد اللاعبين النخبويين مقارنة بما يحققه البشر في الاستقبال.
ما الذي يعنيه هذا خارج مائدة البينغ بونغ
يبين آيس أن روبوتاً فيزيائياً، وليس مجرد برنامج حاسوب، يمكنه الآن تحدي خبراء بشر في رياضة تفاعلية سريعة دون تبسيط القواعد. بالنسبة لغير المتخصصين، الخلاصة لا تكمن فقط في أن آلة قادرة على لعب تنس طاولة مبهر؛ بل في أن الجمع بين الاستشعار السريع، واتخاذ القرار المتعلّم، والمعدات الرشيقة يستطيع التعامل مع مهام العالم الحقيقي عند حدود زمن استجابة البشر. قد تساعد نفس التقنيات في نهاية المطاف الروبوتات على العمل بأمان بجانب البشر في أرضيات المصانع، أو تمكين أجهزة مساعدة من التنسيق مع حركات المستخدمين، أو ابتكار أدوات تدريب رياضية تدفع الرياضيين بطرق كانت مستحيلة سابقاً. وعلى الرغم من أن نمذجة الاستراتيجية البشرية والتكتيكات طويلة الأمد لا تزال تمثل تحدياً، يشكّل آيس خطوة مهمة نحو أنظمة ذكاء اصطناعي فيزيائية يمكنها مشاركة مساحاتنا والاستجابة لنا في الزمن الحقيقي.
الاستشهاد: Dürr, P., El Gheche, M., Maeda, G.J. et al. Outplaying elite table tennis players with an autonomous robot. Nature 652, 886–891 (2026). https://doi.org/10.1038/s41586-026-10338-5
الكلمات المفتاحية: روبوت تنس الطاولة, الذكاء الاصطناعي الفيزيائي, التعلّم المعزَّز, الرؤية الحدثية, التفاعل بين الإنسان والروبوت