Clear Sky Science · sv
Att spela ut elitspelare i bordtennis med en autonom robot
Robotar tar plats på idrottsscenen
Föreställ dig att du står mitt emot en robot över ett bordtennisbord och upptäcker att den inte bara spelar boll med dig—den kan slå rutinerade konkurrenter. Den här artikeln presenterar Ace, en autonom bordtennisrobot som spelar på samma nivå som elitmänniskor. Utöver att vara en häftig sportpryl ger Ace en försmak av en framtid där maskiner hanterar blixtsnabba, fysiska interaktioner med människor i vardagliga miljöer, från fabriker till hushållsassistenter.

Varför bordtennis är ett tufft prov
Bordtennis är mycket mer krävande än det kan verka i tv. I spel på hög nivå kan bollen färdas snabbare än 20 meter per sekund, och spelare har ibland mindre än en halv sekund mellan slag att se, besluta och röra sig. Förutom hastigheten böjer bollens skruv—dess snabba rotation—dess bana genom luften och ändrar hur den studsar mot bordet och racketen. Skruvar kan överstiga 1 000 radianer per sekund, vilket får slag att svänga eller studsa på svårförutsägbara sätt. Tidigare bordtennisrobotar undvek stora delar av denna komplexitet genom att skjuta bollar från enkla apparater, använda mindre spelområden eller i stort sett ignorera skruv. Ace tar istället sig an hela utmaningen från riktiga matcher spelade med standardutrustning och officiella regler.
Att se en snabbrörlig boll i realtid
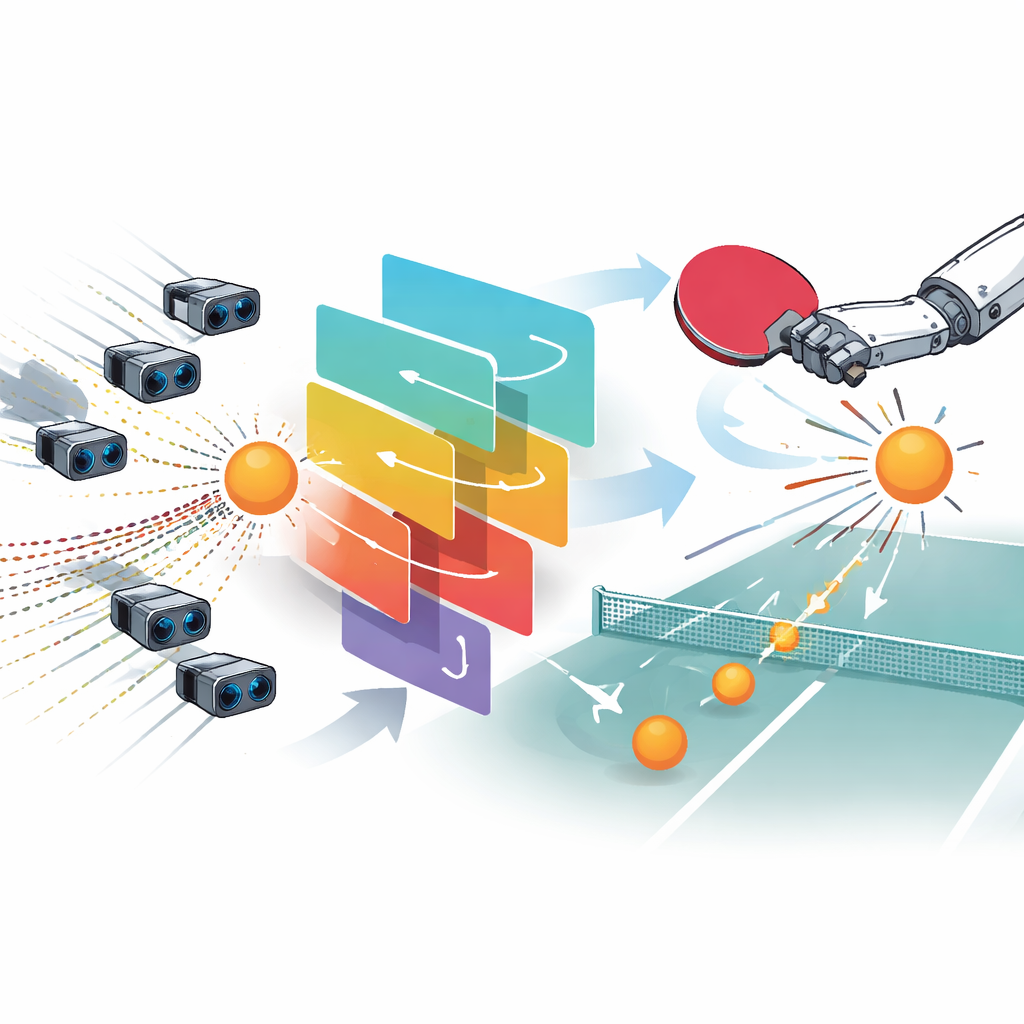
För att hantera sådan hastighet behöver Ace exceptionell syn. Systemet använder nio konventionella kameror placerade runt en olympisk spelplan för att följa bollen i tre dimensioner. Dessa kameror mäter bollens position ungefär 200 gånger per sekund med millimeternoggrannhet och endast ett par tusendelars sekunds fördröjning. Men position räcker inte. Skruv är avgörande i seriöst spel, så Ace använder även tre specialiserade "gaze control"-enheter, var och en med en högfrekvent händelsebaserad sensor, styrbara speglar och en teleobjektiv. Istället för att spela in fullständiga bilder loggar dessa sensorer bara ljusförändringar vid varje pixel och producerar strömmar av små "händelser" som fångar rörelse med extremt låg oskärpa. Genom att mata dessa händelser till ett neuralt nätverk och en andra, mer precis algoritm, uppskattar Ace hur snabbt och i vilken riktning bollen snurrar med flera hundra uppdateringar per sekund. Systemet blandar dessa mätningar, väljer den bästa uppskattningen vid varje ögonblick och skickar dem till styrprogrammet som bestämmer hur roboten ska röra sig.
Hur roboten väljer och utför sina slag
Aces "hjärna" utgörs av en uppsättning styrpolicyer inlärda med djup förstärkningsinlärning, en metod där mjukvara förbättras genom virtuella försök och misstag. I simulering övar roboten upprepade gånger på att returnera enskilda slag, styrd av en belöningssignal som gynnar framgångsrika returer med specifika egenskaper som kraftig topspin eller precisa landningspunkter. En smart detalj i träningsproceduren låter inlärningsalgoritmen använda perfekt simulerad information bakom kulisserna medan policyerna själva endast ser brusiga, realistiska sensormätningar, vilket hjälper dem att överföras smidigt till verkligheten. Under en bollväxling får Ace var 32 millisekund en uppdaterad historik av boll- och robottillstånd, väljer en av flera inlärda "skills" och producerar en abstrakt handling. Denna handling omvandlas sedan av en optimeringsrutin till en detaljerad, mjuk ledningsbana som respekterar hastighetsgränser och undviker kollisioner med bordet eller roboten själv. Parallellt förbereder en annan planerare ständigt en säker "återställnings"-rörelse så att armen snabbt kan återhämta sig och vara redo för nästa slag.
Skräddarsydd kropp för atletiskt spel
För att matcha mänsklig rörlighet designade teamet en specialiserad robotarm med åtta leder—två glidleder och sex roterande—som ger precis tillräcklig frihet för att positionera, vinkla och svinga racketen som en skicklig utövare. Armen är gjord av lätta, starka metallstrukturer optimerade av datoralgoritmer och tillverkade additivt, vilket möjliggör snabba rörelser utan att förlora styvhet. Armens ände bär ett regelrätt racket och en liten kopp som håller bollen för enhandsservar, förenligt med anpassningar som tillåts i officiella regler. Alla aktuatorer är synkroniserade för att reagera varje millisekund, och visionssystemet delar samma tidsram, vilket håller sensning och rörelse tätt koordinerade. På lägsta nivå beter sig roboten på ett enkelt och förutsägbart sätt, med fördröjningar som hålls till några millisekunder även i högsta hastighet—detta är avgörande för att träffa bollar som anländer på bråkdelen av en sekund.
Hur Ace presterade mot mänskliga experter
Forskarna testade Ace i april 2025 mot fem elitspelare—erfarna konkurrenter med över ett decennium av intensiv träning—och två proffs från Japans högsta liga. Matcherna följde internationella regler, med standardbord, nät och bollar, och bedömdes av licensierade domare. Ace spelade bäst av tre matcher mot elitgruppen och bäst av fem mot proffsen. Den vann tre av de fem mötena mot elitspelarna och tog ett game från en av proffsen. Data inspelade under spelet visar att Ace pålitligt returnerar slag upp till omkring 14 meter per sekund och hanterar ett brett spektrum av skruvar med returfrekvenser över 75 procent upp till betydande skruvnivåer. Jämfört med människorna förlitar sig Ace inte på särskilt snabba slag för att vinna poäng. Istället liknar dess "vinnande" slag i hastighet och skruv dess vanliga returer, vilket tyder på att konsekvens—att få tillbaka bollen på bordet om och om igen—är dess främsta styrka. Robotens tendens är också att träffa bollen tidigare efter studs, och dess omsorgsfullt designade servar ger fler direkta poäng, eller "aces", mot elitspelarna än vad människorna lyckas kontra.
Vad detta betyder bortom pingisbordet
Ace visar att en fysisk robot, inte bara ett datorprogram, nu kan utmana mänskliga experter i en snabb, interaktiv sport utan att förenkla reglerna. För icke-specialister är huvudpoängen inte bara att en maskin kan spela imponerande bordtennis; det är att kombinationen av snabb sensing, inlärda beslutsprocesser och smidig hårdvara kan hantera verkliga uppgifter i gränslandet för mänsklig reaktionstid. Samma tekniker kan så småningom hjälpa robotar att arbeta säkert tillsammans med människor på fabriksgolv, assisterande enheter att samordna med användares rörelser, eller nya träningsverktyg att utmana idrottare på sätt som tidigare var omöjliga. Även om modellering av mänsklig strategi och långsiktig taktik fortfarande är en utmaning, markerar Ace ett viktigt steg mot fysiska AI-system som kan dela våra utrymmen och reagera på oss i realtid.
Citering: Dürr, P., El Gheche, M., Maeda, G.J. et al. Outplaying elite table tennis players with an autonomous robot. Nature 652, 886–891 (2026). https://doi.org/10.1038/s41586-026-10338-5
Nyckelord: robotbordtennis, fysisk AI, förstärkningsinlärning, händelsebaserad vision, människa–robot-interaktion