Clear Sky Science · tr
Robot destekli lomber faset eklem infiltrasyonu karşılaştırmalı bir fantom çalışmasında manuel tekniğe kıyasla doğruluğu artırır ve radyasyon maruziyetini azaltır
Sırt ağrısı enjeksiyonlarına neden robotik bir yardımcı geliyor
Kronik bel ağrısı olan birçok kişi, semptomlarını teşhis etmek ve hafifletmek için omurun yakınlarına küçük enjeksiyonlar alır. Bu enjeksiyonlar için iğnelerin yerleştirilmesi hassas bir iştir ve genellikle X ışını rehberliğine ve uzman bir hekimin sabit eline dayanır. Bu çalışma, kompakt bir yatak başı robotunun bu iğneleri daha hassas yönlendirip yönlendiremeyeceğini ve hem hastalar hem de hekimler için daha az radyasyon maruziyeti sağlayıp sağlamayacağını araştırıyor.
Sıkışık klinik alanlar için tasarlanmış küçük bir robot
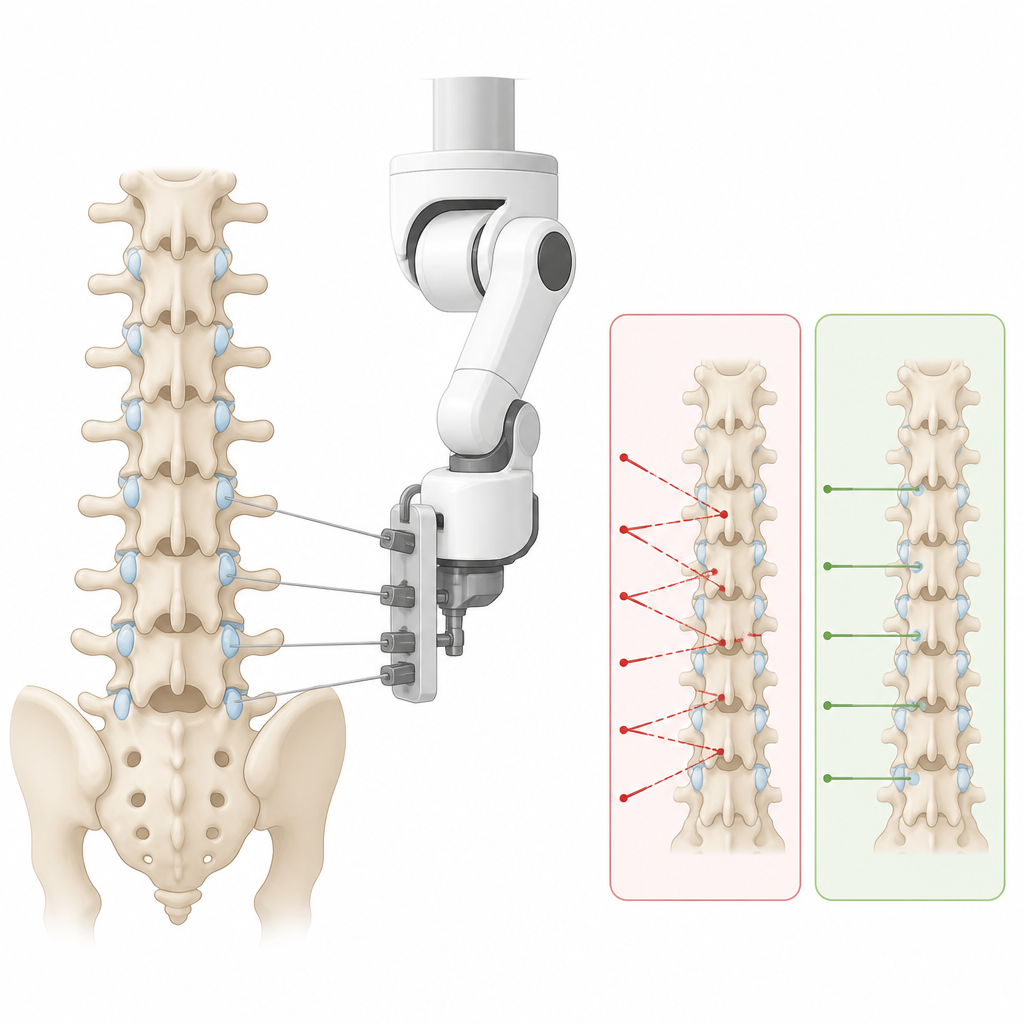
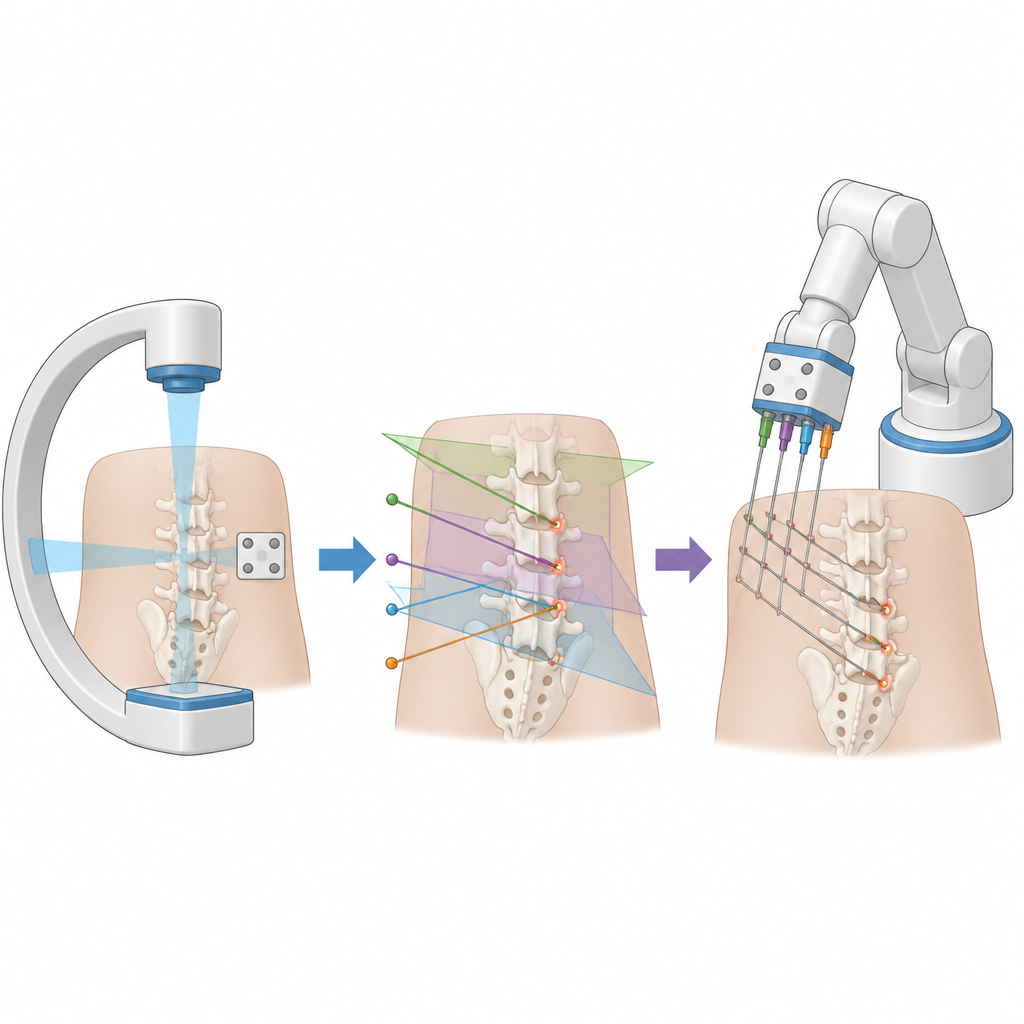
Araştırmacılar, tam bir ameliyathane dışında, ağrı poliklinikleri veya ayaktan merkezler gibi yerlerde kullanım için tasarlanmış ayakkabı kutusu boyutunda bir robotik kolu test ettiler. Ayrıntılı bir BT taramasına ihtiyaç duymak yerine robot, hastanın omurgasının üç boyutlu konumunu anlamak için dik açılarda çekilen sadece iki basit X ışını görüntüsü kullanır. Bu hızlı kaydolma işlemi tamamlandıktan sonra robot, her seferinde yeni görüntü almadan alt sırttaki birden fazla seviyeye ait iğne yolunu sıralı olarak hizalayabilir. Hekim hâlâ rehber bir tüp aracılığıyla iğneyi elle yerleştirir, ancak robot açıyı ve giriş noktasını sabitler.
Kontrollü bir modelde omurga enjeksiyonlarını simüle etmek
Robot rehberli enjeksiyonları geleneksel manuel teknikle karşılaştırmak için ekip, alt omurganın gerçekçi bir modelini oluşturdu. Bir plastik lomber omurga, yumuşak, opak bir jel içine gömülerek kemiklerin yumuşak dokunun altında nasıl gizlendiğini taklit etti. Başlangıç seviyesinden çok deneyimli uzmana kadar 22 nöroşirürjiyen, bu model üzerinde aynı on enjeksiyon dizisini iki kez gerçekleştirdi: önce canlı X ışını altında manuel olarak, ardından cihaza kısa bir tanıtımın ardından robotik yardımla. Araştırmacılar her prosedürün ne kadar sürdüğünü, kaç X ışını görüntüsüne ihtiyaç duyulduğunu, iğnelerin kaç kez yeniden konumlandırıldığını ve her iğne ucunun önceden belirlenmiş ideal hedef noktalarına ne kadar yakın olduğunu kaydetti.
Daha az radyasyonla daha keskin nişan
Robot rehberli yaklaşım açıkça radyasyonu azalttı. Manuel yönteme kıyasla cerrahlar yaklaşık yarı sayıda X ışını görüntüsü kullandı ve floroskopi altında geçirilen süre kabaca üçte iki oranında azaldı; bu da yaklaşık %38’lik bir radyasyon dozu kesintisiyle sonuçlandı. Aynı zamanda iğne uçları amaçlanan hedeflere daha yakın yerleşti. Ortalama olarak, robot rehberli iğneler ideal noktadan yaklaşık 6 milimetre saparken, elle yapılan işlemlerde bu değer 7 milimetreden fazla idi ve robotik iğneler önceden tanımlanmış “tatlı nokta” alanını iki kattan fazla daha sık isabet etti. Manuel prosedürler, yolu düzeltmek için sık iğne ayarlamaları gerektirirken, robot protokolü herhangi bir yeniden konumlandırma olmadan doğruluğunu sağladı; bu da gerçek hastalarda doku içinde daha az sokma anlamına gelebilir.
Zaman takasları ve yeni aracı öğrenmek
Ana dezavantaj zamandı. Toplam işlem süresi robotla iki kattan fazla uzun sürdü; bu büyük ölçüde planlama ve kurulumun tüm katılımcılar için yeni olmasından kaynaklandı. Ancak robot kaydı yapılıp yollar planlandıktan sonra gerçek enjeksiyon aşaması manuel olan kadar hızlıydı. Robot destekli enjeksiyonların ikinci serisi zaten ilk seriye göre belirgin şekilde daha hızlıydı; bu da gerçek dünya prosedürlerini kısaltabilecek bir öğrenme eğrisine işaret ediyor. İlginç bir şekilde, daha az deneyimli hekimler robotu kullanırken kendilerini daha güvende ve hassas hissetme eğilimindeyken, çok deneyimli cerrahlar manuel ve robotik yöntemler arasında tercih konusunda daha dengeli bölündü.
Bu, sırt ağrısı çeken insanlar için ne anlama gelebilir
Basitçe söylemek gerekirse, çalışma küçük, klinik dostu bir robotun hekimlerin omurga enjeksiyon iğnelerini daha doğru yerleştirmesine ve daha az X ışını maruziyetiyle bunu yapmasına yardımcı olabileceğini; ancak bunun ek kurulum süresi maliyeti olduğunu gösteriyor. Sistem tam BT tarayıcıları yerine standart iki boyutlu X ışını ekipmanıyla çalıştığı için, kaynakların sınırlı olduğu ayaktan ortamlarda daha güvenli, düşük radyasyonlu enjeksiyonları daha erişilebilir hale getirebilir. Bu çalışma bir model üzerinde yapıldığından hasta verileri değilse de, kompakt robotik rehberlerle desteklendiğinde gelecekteki bel ağrısı tedavilerinin ve ilgili prosedürlerin daha hassas, daha rahat ve daha az radyasyonla gerçekleştirilebileceğini düşündürmektedir.
Atıf: Kosterhon, M., Schluechtermann, L. & Ringel, F. Robot-assisted lumbar facet joint infiltration improves accuracy and reduces radiation exposure compared to the manual technique in a comparative phantom study. Sci Rep 16, 14746 (2026). https://doi.org/10.1038/s41598-026-52435-5
Anahtar kelimeler: robotik omurga enjeksiyonu, lomber faset eklem, radyasyon dozu azaltımı, floroskopi eşliğinde işlem, iğne yerleştirme doğruluğu