Clear Sky Science · nl
Robotgeassisteerde infiltratie van lumbale facetgewrichten verbetert nauwkeurigheid en vermindert stralingsblootstelling vergeleken met de handmatige techniek in een vergelijkende fantoomstudie
Waarom rugpijninjecties een robotische assistent krijgen
Veel mensen met chronische lage rugpijn krijgen kleine injecties nabij de wervelkolom om hun klachten te diagnosticeren en te verlichten. Het plaatsen van de naalden voor deze injecties is precisiewerk dat meestal afhankelijk is van röntgengestuurde beelden en de vaste hand van een specialist. Deze studie onderzoekt of een compact bedzijde-robotje die naalden preciezer kan geleiden terwijl zowel patiënten als artsen minder straling ontvangen.
Een kleine robot ontworpen voor krappe klinische ruimtes
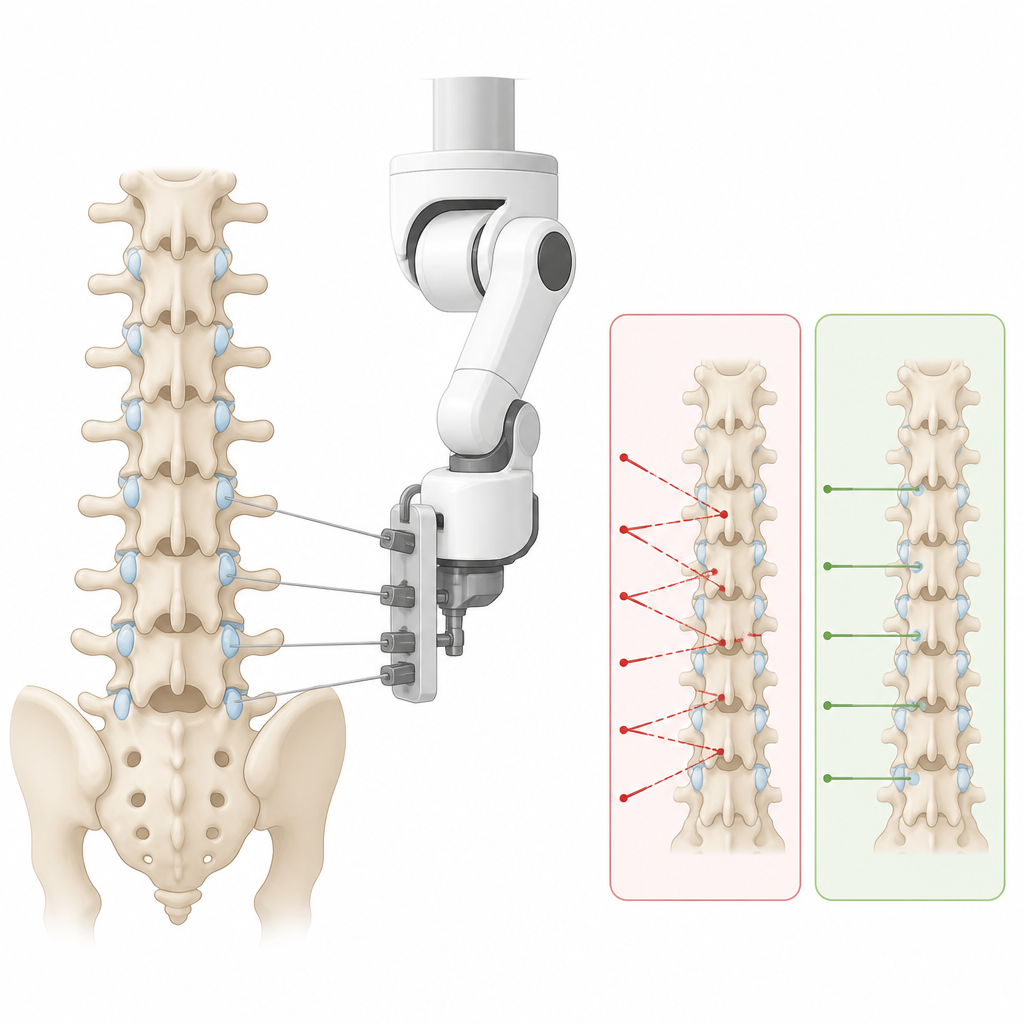
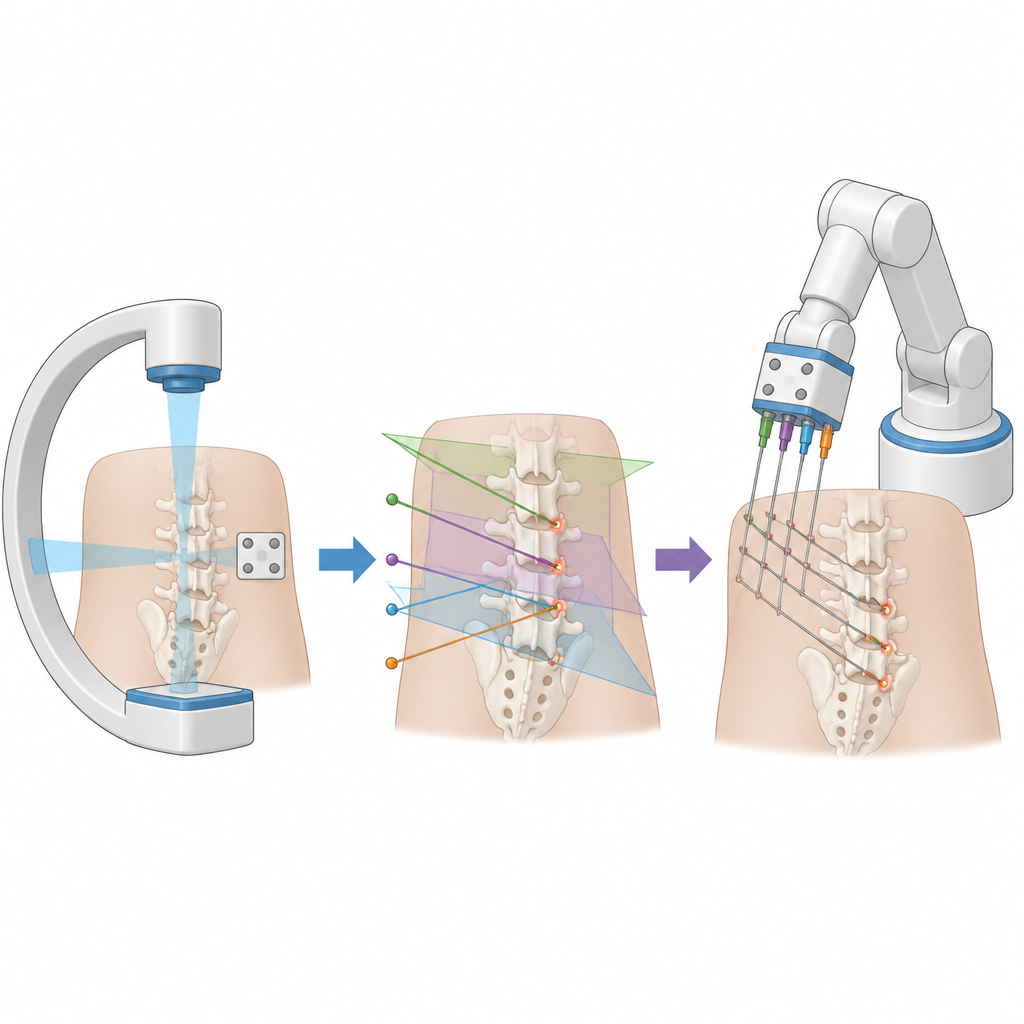
De onderzoekers testten een schoenendoosgrootte robotarm die bedoeld is voor gebruik buiten een volledige operatiekamer, bijvoorbeeld in pijnklinieken of poliklinieken. In plaats van een gedetailleerde CT-scan te vereisen, gebruikt de robot slechts twee eenvoudige röntgenopnamen onder rechte hoeken om te bepalen waar de wervelkolom zich in de driedimensionale ruimte bevindt. Zodra deze snelle registratie is voltooid, kan de robot de naaldrichting voor meerdere lagen van de onderrug achtereenvolgens uitlijnen, zonder voor elke keer nieuwe beelden te maken. De arts brengt de naald nog steeds met de hand in via een geleidebuis, maar de robot fixeert de hoek en het insteekpunt.
Simulatie van spinale injecties in een gecontroleerd model
Om robotgeassisteerde injecties te vergelijken met de traditionele handmatige techniek bouwde het team een realistisch model van de onderrug. Een kunststof lumbale wervelkolom was ingebed in een zachte, ondoorzichtige gel in een doos, waarbij werd nagebootst hoe botten zijn verborgen onder zacht weefsel. Tweeëntwintig neurochirurgen, variërend van beginners tot zeer ervaren specialisten, voerden dezelfde reeks van tien injecties twee keer op dit model uit: eerst handmatig onder live röntgen, daarna met robotondersteuning na een korte introductie van het apparaat. De onderzoekers registreerden hoe lang elke procedure duurde, hoeveel röntgenopnamen nodig waren, hoe vaak naalden moesten worden bijgesteld en hoe dicht elke naaldpunt bij een reeks ideale doelpunten kwam.
Scherpere richtbaarheid met minder straling
De robotgeassisteerde aanpak verminderde duidelijk de stralingsbelasting. Vergeleken met de handmatige methode gebruikten chirurgen ongeveer de helft minder röntgenopnamen en brachten ze ongeveer twee derde minder tijd onder fluoroscopie door, wat resulteerde in een reductie van de stralingsdosis met circa 38 procent. Tegelijkertijd eindigden de naaldpunten dichter bij hun beoogde doelen. Gemiddeld misten met de robot geleide naalden het ideale punt met ongeveer 6 millimeter, tegenover meer dan 7 millimeter bij handmatige plaatsing, en ze troffen het vooraf gedefinieerde “sweet spot”-gebied meer dan twee keer zo vaak. Handmatige procedures vereisten vaak het aanpassen van de naald om het pad te corrigeren, terwijl het robotprotocol zijn nauwkeurigheid behaalde zonder enige herpositionering, wat wijst op minder prikken door weefsel bij echte patiënten.
Tijd-ruil en het leren van het nieuwe instrument
Het voornaamste nadeel was tijd. De totale procetuurduur was meer dan twee keer zo lang met de robot, grotendeels omdat planning en opstelling nieuw waren voor alle deelnemers. Zodra de robot echter was geregistreerd en de paden waren gepland, was de daadwerkelijke injectiefase even snel als de handmatige. De tweede reeks robotgeassisteerde injecties was al merkbaar sneller dan de eerste, wat wijst op een leercurve die in de praktijk procedures zou kunnen verkorten. Interessant genoeg voelden artsen met minder ervaring zich doorgaans zelfverzekerder en preciezer met de robot, terwijl zeer ervaren chirurgen meer verdeeld waren in hun voorkeur tussen handmatige en robotgeassisteerde methoden.
Wat dit kan betekenen voor mensen met rugpijn
Kort gezegd laat de studie zien dat een klein, kliniekvriendelijk robotje artsen kan helpen spinale injectienaalden nauwkeuriger te plaatsen terwijl er minder röntgenblootstelling is, tegen de prijs van extra insteltijd. Omdat het systeem werkt met standaard tweedimensionale röntgenapparatuur in plaats van volledige CT-scanners, zou het veiliger, laagstralingsinjecties toegankelijker kunnen maken in poliklinische omgevingen met beperkte middelen. Hoewel dit werk in een model en niet bij patiënten is uitgevoerd, suggereert het dat toekomstige behandelingen van rugpijn en aanverwante procedures nauwkeuriger en comfortabeler kunnen worden, met minder straling, wanneer ze worden ondersteund door compacte robotgeleidingen.
Bronvermelding: Kosterhon, M., Schluechtermann, L. & Ringel, F. Robot-assisted lumbar facet joint infiltration improves accuracy and reduces radiation exposure compared to the manual technique in a comparative phantom study. Sci Rep 16, 14746 (2026). https://doi.org/10.1038/s41598-026-52435-5
Trefwoorden: robotische wervelinjectie, lumbaal facetgewricht, vermindering van stralingsdosis, fluoroscopie-gestuurde procedure, nauwkeurigheid van naaldplaatsing