Clear Sky Science · ja
ロボット支援腰椎椎間関節注入は比較的ファントム研究で手動法に比べ精度を向上させ放射線被ばくを低減する
なぜ腰痛注射にロボットの助けが入るのか
慢性の腰痛を抱える多くの人は、診断や症状緩和のために脊椎付近への小さな注射を受けます。これらの注射で針を配置する作業は繊細で、通常はX線によるガイダンスと専門医の安定した手技に頼ります。本研究は、ベッドサイドで使える小型ロボットが、患者と医師の被ばくを減らしつつ針をより正確に誘導できるかを検証します。
狭い臨床環境向けに作られた小型ロボット
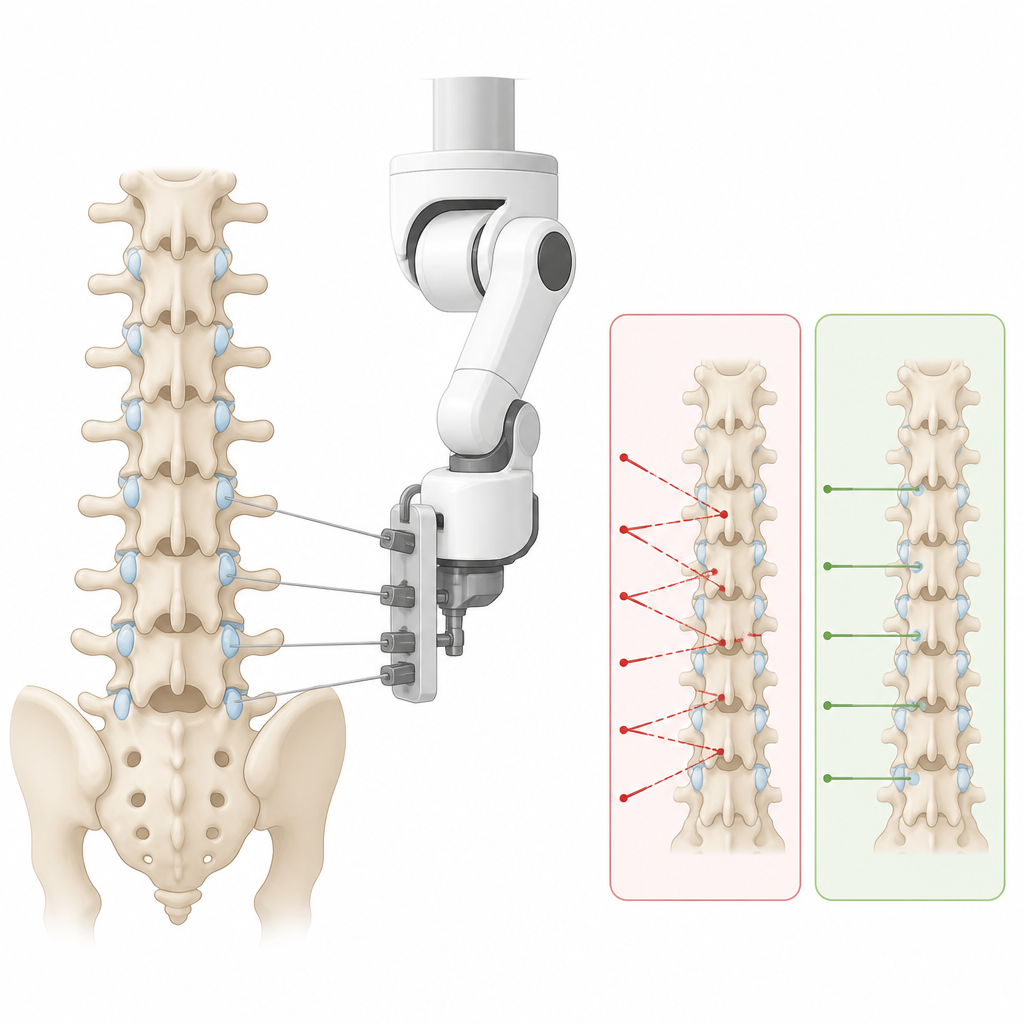
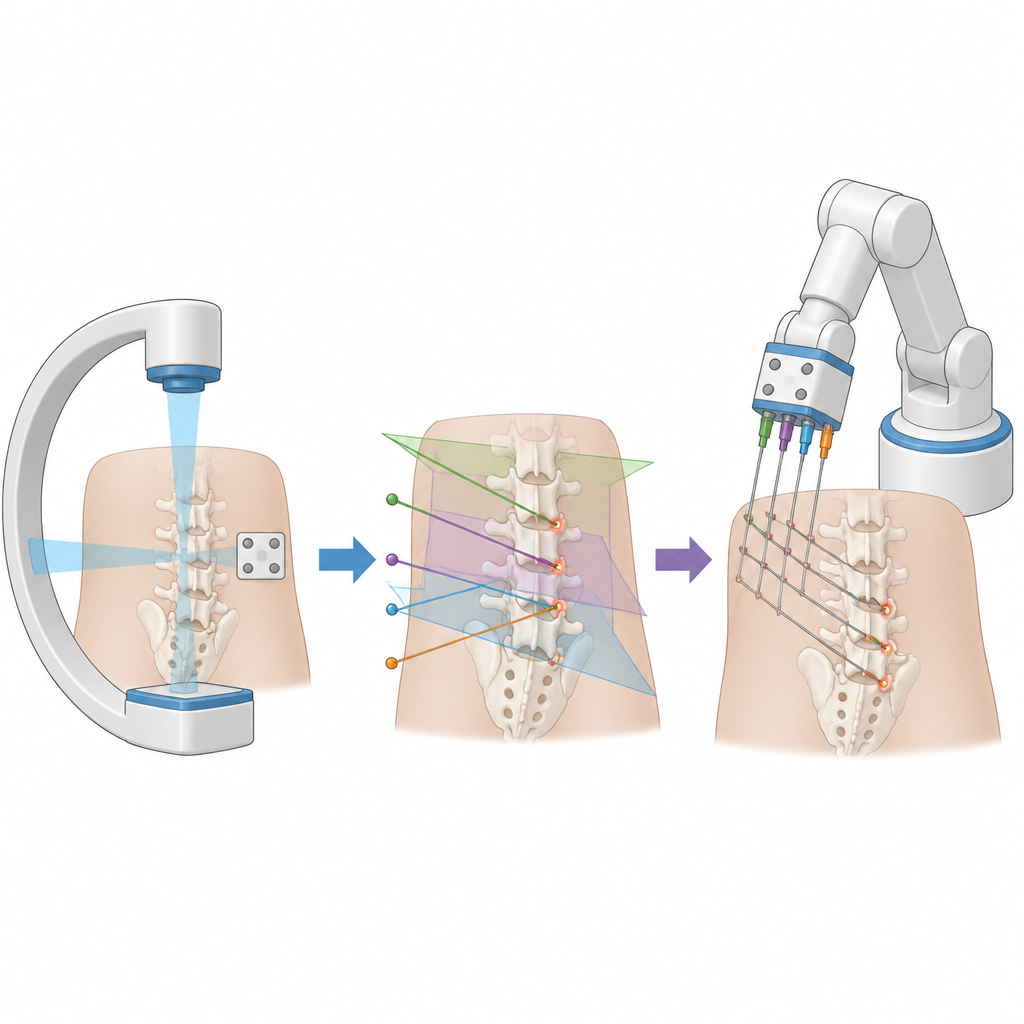
研究者らは、手術室全体を必要としない、痛みクリニックや外来センターのような場所での使用を想定したシューケースサイズのロボットアームを試験しました。詳細なCTスキャンは不要で、ロボットは直交する2枚の単純なX線画像だけで患者の脊椎の三次元位置を把握します。この簡便な位置合わせ(レジストレーション)が終われば、ロボットはその都度新しい画像を撮らずに下部脊椎の複数レベルへ連続的に針経路を整列できます。医師は依然としてガイドチューブ越しに手で針を挿入しますが、角度と入口点はロボットが固定します。
制御されたモデルで脊椎注射をシミュレーション
ロボット誘導注射と従来の手動手技を比較するために、チームは下位脊椎のリアリスティックなモデルを作成しました。プラスチック製の腰椎を柔らかく不透過なゲルの中にボックス状に埋め込み、骨が軟部組織の下に隠れている様子を模してあります。初心者から熟練した専門医までの22人の脳神経外科医が、このモデルで同じ10回の注射シリーズを2回ずつ行いました。まずは生X線下で手動で、次に短いデバイス導入後にロボット支援で行いました。研究者らは各手技の所要時間、必要なX線画像数、針の再配置頻度、および各針先端が理想的な目標点からどれだけ近づいたかを記録しました。
被ばくを減らしつつ狙いが鋭くなる
ロボット誘導アプローチは明確に放射線量を減らしました。手動法と比べて、外科医はおよそ半分のX線画像数を使用し、透視時間は約3分の2まで短くなり、結果として放射線線量は約38%削減されました。同時に針先は意図した目標により近づきました。平均して、ロボット誘導の針は理想点から約6ミリずれたのに対し、手動では7ミリ以上のずれがあり、ロボットは事前定義された“スイートスポット”領域に2倍以上の頻度で到達しました。手動手技では経路を修正するための頻繁な針の調整が必要でしたが、ロボットプロトコールでは再配置なしで精度を達成しており、実患者では組織への刺入回数が減ることが示唆されます。
時間のトレードオフと新しい機器の習熟
主な欠点は時間でした。プランニングとセットアップが参加者全員にとって新しいため、総手技時間はロボット使用で2倍以上かかりました。しかし、ロボットのレジストレーションと経路計画が終了すれば、注入の実行段階は手動と同等の速さでした。2回目のロボット支援注射シリーズではすでに明らかに速くなっており、現場での手技短縮につながる学習曲線の存在を示唆します。興味深いことに、経験の浅い医師はロボット使用時により自信を持ち正確だと感じる傾向があり、非常に経験豊富な外科医は手動とロボットのどちらを好むかで意見が分かれました。
腰痛患者にとっての意義
簡単に言えば、本研究はクリニックに適した小型ロボットがセットアップ時間の増加という代償はあるものの、針の位置精度を高めつつX線被ばくを減らして医師を支援できることを示しています。システムがフルCTスキャナではなく標準的な二次元X線装置で動作するため、資源の限られた外来環境でも低線量でより安全な注射を提供しやすくなる可能性があります。本研究は患者ではなくモデルで行われましたが、将来的には小型ロボットガイドにより腰痛治療や関連手技がより正確で快適になり、被ばくも減ることが期待されます。
引用: Kosterhon, M., Schluechtermann, L. & Ringel, F. Robot-assisted lumbar facet joint infiltration improves accuracy and reduces radiation exposure compared to the manual technique in a comparative phantom study. Sci Rep 16, 14746 (2026). https://doi.org/10.1038/s41598-026-52435-5
キーワード: ロボット脊椎注射, 腰椎椎間関節, 線量低減, 透視ガイド手技, 針位置精度