Clear Sky Science · ru
Картирование дискретного ландшафта складывания
От плоских листов к «умным» формам
Представьте, что роботов, медицинские приборы или даже космические телескопы можно собирать не путём скручивания деталей вместе, а складывая один плоский лист так, чтобы он сам «раскрывался» в нужную форму. Это исследование решает ключевую задачу, стоящую за этой идеей: понять все возможные способы, которыми плоский шаблон может сложиться в трёхмерный объект, включая многочисленные варианты, когда процесс идёт неправильно, чтобы проектировщики могли создавать процессы складывания быстрее, аккуратнее и надёжнее.
Почему складывание важно в современной технологии
Складывание перестаёт быть лишь искусством; оно становится практической производственной стратегией на разных масштабах — от ДНК‑наноструктур до метровых развертываемых спутников. Превращение плоских материалов в сложные формы сокращает отходы, избегает клея и сварки и хорошо сочетается с методами вроде лазерной резки и 3D‑печати. Сложенные структуры можно настроить так, чтобы они были чрезвычайно жёсткими, поглощали удары или меняли форму при нагреве или растяжении, поэтому они появляются в мягких роботах, медицинских имплантах и космической технике. Но чтобы по‑настоящему использовать возможности складывания, разработчикам нужно знать не только начальную и конечную формы, но и каждый шаг между ними.
Проблема избытка вариантов складывания
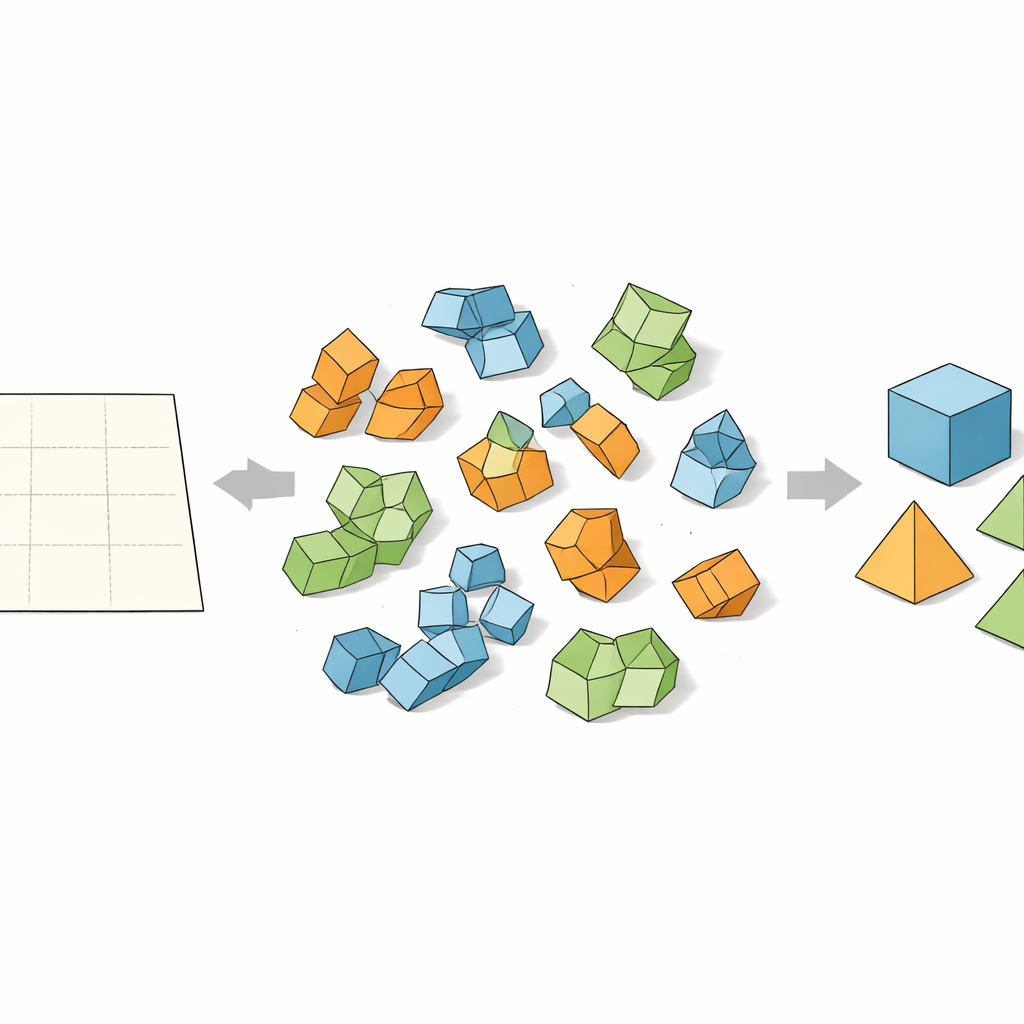
Проектирование складываемого объекта начинается с плоского шаблона, называемого сетом, который можно вырезать и сложить в целевую форму, например куб или более сложный многогранник. В принципе можно перечислить все способы резки и последовательности сгибов вдоль рёбер, но число возможных последовательностей взрывается с ростом числа рёбер. Даже у простого куба уже тысячи возможных порядков вырезания, а у больших форм их — десятки миллионов. Многие из этих последовательностей по сути одинаковы или никогда не позволяют грани действительно откинуться. Существующие подходы либо отбирают лишь наиболее вероятные маршруты, либо симулируют складывание напрямую и рискуют пропустить редкие, но важные пути, оставляя разработчиков без полного «плана» процесса складывания.
Преобразование форм в сети
Авторы решают эту проблему, переводя каждую трёхмерную форму и её плоские шаблоны в графы, где грани становятся вершинами, а общие рёбра — рёбрами графа. Перерезание ребра соответствует удалению связи, а складывание или раскрытие меняет то, как грани могут перемещаться относительно друг друга. Начиная с собранного многогранника и его сета, алгоритм систематически удаляет связи во всех релевантных комбинациях, но организует работу умно, чтобы избегать повторений. Каждая различная конфигурация связанных граней кодируется уникальным двоичным кодом, что позволяет быстро обнаруживать дубликаты. Затем метод группирует детальные конфигурации в более широкие «состояния складывания», определяемые тем, какие рёбра действительно позволяют граням двигаться, и строит направленный граф, фиксирующий, как одно состояние может переходить в другое по мере добавления разрезов.
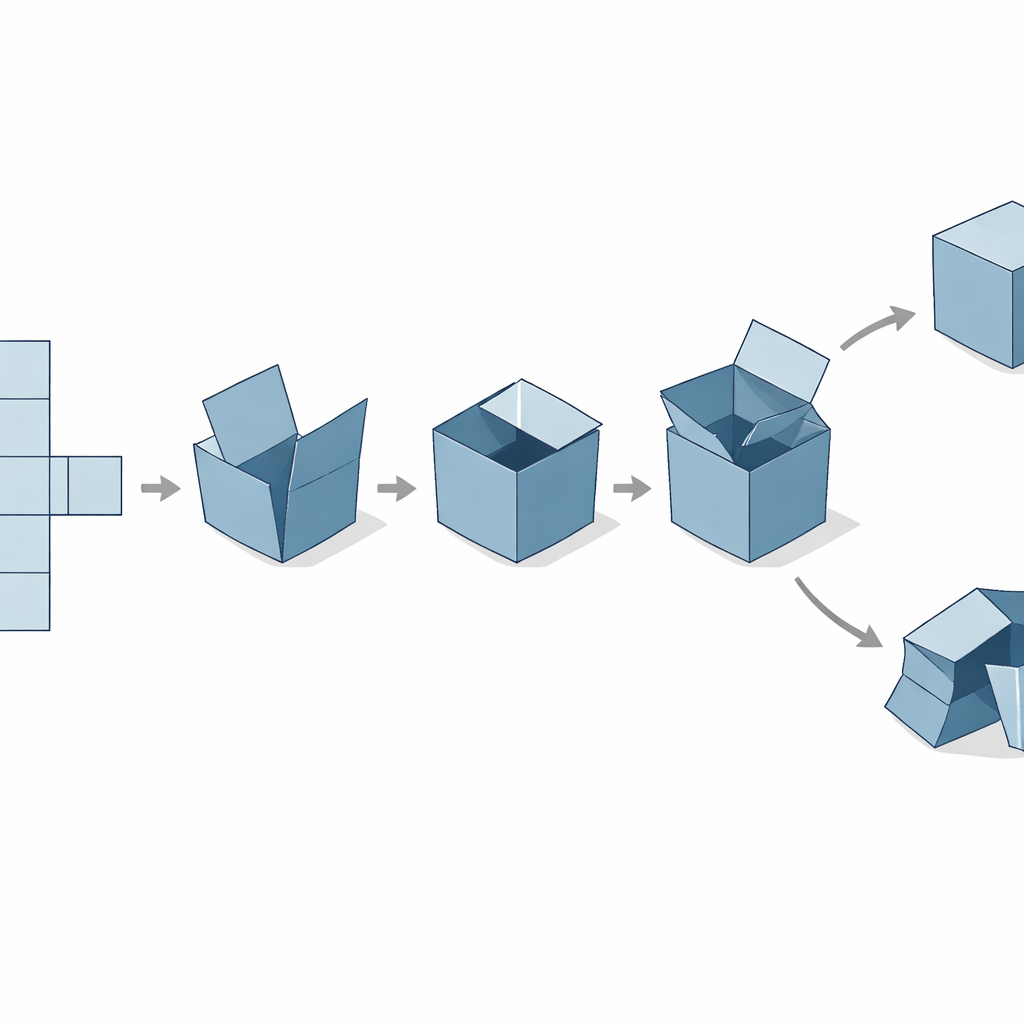
Видеть все пути, включая неверные
На примере куба алгоритм восстанавливает все одиннадцать известных сетов и находит восемнадцать различных промежуточных состояний складывания, связанных в полный «ландшафт складывания». Этот ландшафт показывает каждый маршрут от плоского шаблона до готового куба и то, как разные сети разделяют многие одни и те же промежуточные формы. Метод естественно расширяется на более сложные ситуации, например шаблоны, которые могут складываться в более чем одну итоговую структуру, а также на мисфолды — случаи, когда панели блокируются так, что предполагаемая форма уже не закрывается. Включив такие неправильные структуры в анализ, авторы показывают, какие последовательности разрезов и сгибов склонны «поймать» систему и как альтернативные пути могут объехать эти тупики.
Проектирование лучшего складывания для реальных устройств
Проще говоря, исследование предлагает способ построить полную карту того, как плоский шаблон может складываться, включая все боковые дороги и ошибочные развилки. Эта карта не зависит от материала или масштаба, поэтому она применима как к самособирающимся нанообъектам, управляемым тепловым движением, так и к крупным роботам, вдохновлённым оригами, приводимым в действие моторами. Узнав карту, инженеры могут приписать физические скорости или стоимости каждому шагу, превратив её в инструмент для выбора путей складывания, которые будут быстрее, надёжнее или проще в управлении. Авторы утверждают, что такие ландшафты могут питать будущие инструменты машинного обучения, автоматически проектирующие сеты и последовательности сгибов для новых устройств, помогая превратить складывание в предсказуемую, программируемую производственную стратегию.
Цитирование: Neves, J.C., Marques, B.R., Dias, C.S. et al. Mapping the discrete folding landscape. Commun Phys 9, 153 (2026). https://doi.org/10.1038/s42005-026-02554-2
Ключевые слова: инжиниринг оригами, самоскладывающиеся материалы, сеты многогранников, алгоритмы на основе графов, пути складывания