Clear Sky Science · it
Mappare il paesaggio discreto delle piegature
Da fogli piatti a forme intelligenti
Immaginate di costruire robot, dispositivi medici o perfino telescopi spaziali non avvitando parti insieme, ma piegando un unico foglio piatto in modo che si richiuda spontaneamente nella forma desiderata. Questo studio affronta un problema chiave dietro a quella visione: come comprendere ogni possibile modo in cui un modello piatto può piegarsi in un oggetto tridimensionale, incluse le molte modalità in cui il processo può fallire, così che gli ingegneri possano progettare procedure di piegatura più rapide, pulite e affidabili.
Perché la piegatura conta nella tecnologia moderna
La piegatura non è più soltanto una forma d'arte; sta diventando una strategia pratica di produzione su scala variabile, dalle nanostrutture a base di DNA ai satelliti dispiegabili di metri. Trasformare materiali piatti in forme complesse riduce gli sprechi, evita colle e saldature e si integra bene con tecniche come il taglio laser e la stampa 3D. I materiali piegati possono essere calibrati per essere estremamente rigidi, assorbire impatti o cambiare forma quando riscaldati o stirati, ed è per questo che compaiono in robot morbidi, impianti medici e componenti spaziali. Ma per sfruttare davvero la piegatura, i progettisti devono conoscere non solo le forme iniziali e finali, bensì ogni passo intermedio.
La sfida delle troppe modalità di piegatura
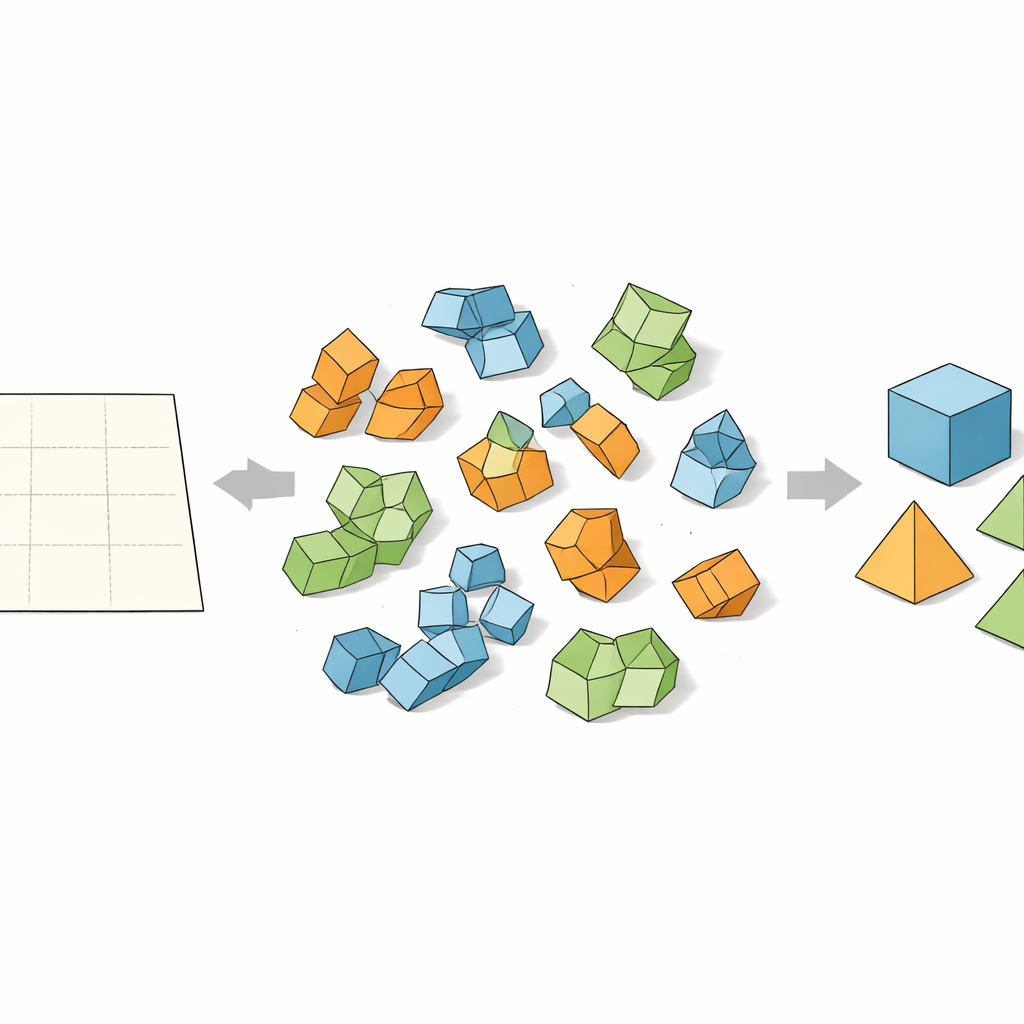
Progettare un oggetto pieghevole parte da un modello piatto, detto rete, che può essere tagliato e piegato in una forma target come un cubo o un poliedro più complesso. In linea di principio si potrebbe elencare ogni modo di tagliare e piegare lungo i bordi, ma il numero di possibili sequenze esplode man mano che aumentano i bordi coinvolti. Anche un semplice cubo ha già migliaia di ordini di taglio possibili, e forme più grandi arrivano a decine di milioni. Molte di queste sequenze sono di fatto equivalenti o non permettono mai a una faccia di ruotare liberamente. Gli approcci esistenti o campionano solo le traiettorie più probabili, oppure simulano la piegatura direttamente rischiando di perdere percorsi rari ma importanti, lasciando i progettisti senza una mappa completa del processo di piegatura.
Trasformare le forme in reti
Gli autori risolvono il problema traducendo ogni forma tridimensionale e i suoi modelli piatti in grafi, dove le facce diventano punti e i bordi condivisi diventano collegamenti. Tagliare un bordo corrisponde a rimuovere un collegamento, mentre piegare o spiegare modifica il modo in cui le facce possono muoversi tra loro. Partendo da un poliedro piegato e dalla sua rete, l'algoritmo rimuove sistematicamente i collegamenti in tutte le combinazioni rilevanti, organizzando però il lavoro in modo intelligente per evitare ripetizioni. Ogni schema distinto di facce connesse è codificato come un codice binario univoco, che consente controlli rapidi per duplicati. Il metodo quindi raggruppa configurazioni dettagliate in più ampi “stati di piegatura”, definiti da quali spigoli consentono effettivamente il movimento delle facce, e costruisce una rete diretta che cattura come uno stato possa seguire un altro man mano che si aggiungono tagli.
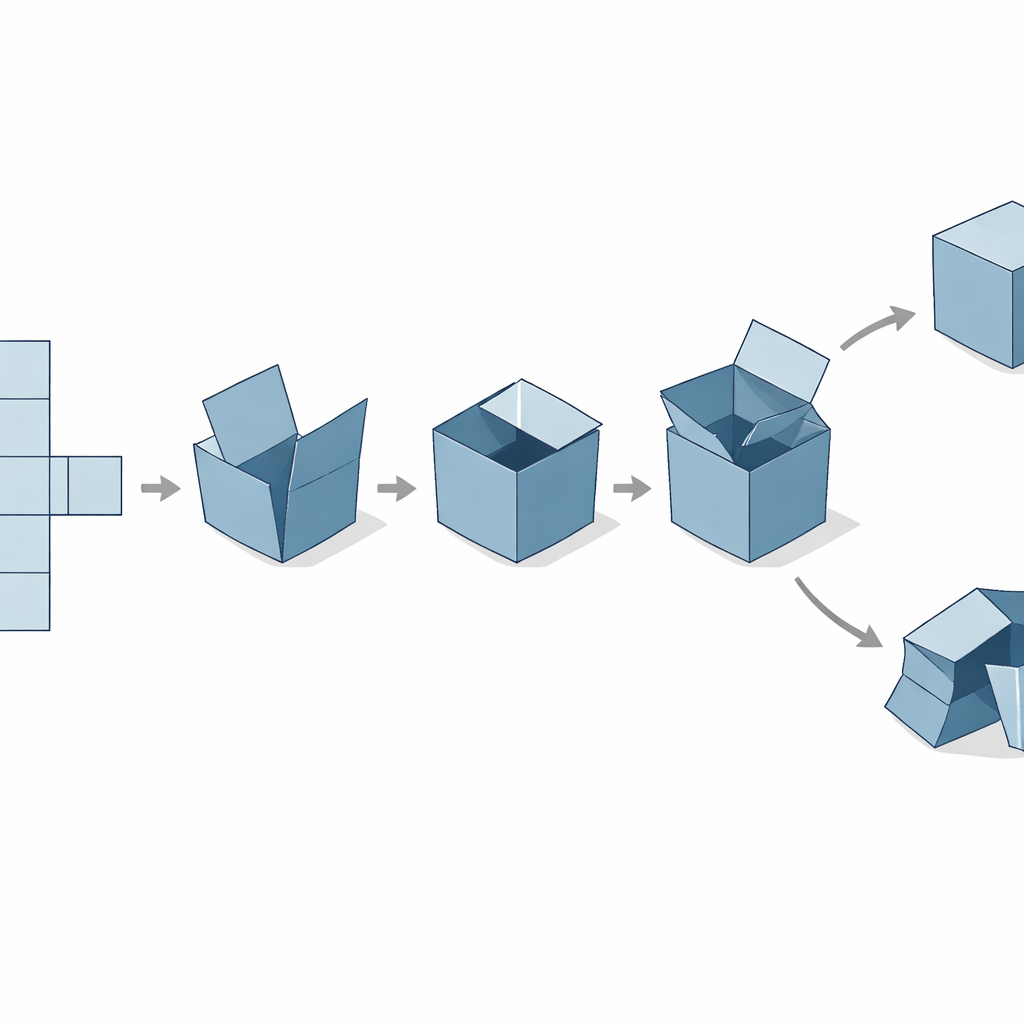
Vedere ogni percorso, compresi quelli sbagliati
Usando il cubo come caso di prova, l'algoritmo recupera tutte le undici reti note e trova diciotto stati intermedi distinti di piegatura, collegati in un completo “paesaggio di piegatura”. Questo paesaggio mostra ogni percorso dal modello piatto al cubo finito e come reti diverse condividano molte delle stesse forme intermedie. Il metodo si estende in modo naturale a situazioni più complesse, come modelli che possono piegarsi in più di una struttura finale, e ai misfold, dove pannelli si bloccano in modo da impedire alla forma prevista di chiudersi. Inserendo queste strutture misfoldate nell'analisi, gli autori rivelano quali sequenze di tagli e pieghe tendono a intrappolare il sistema e come percorsi alternativi possano aggirare queste vie senza uscita.
Progettare piegature migliori per dispositivi reali
In termini semplici, lo studio fornisce un modo per tracciare una mappa completa di come un modello piatto può piegarsi, includendo tutte le deviazioni e le svolte sbagliate. Questa mappa è indipendente dal materiale o dalla scala, quindi si applica sia alle nanostrutture autoassemblanti guidate dal moto termico sia ai grandi robot ispirati all'origami azionati da motori. Una volta nota la mappa, gli ingegneri possono collegare a ogni passo tassi o costi fisici, trasformandola in uno strumento per scegliere percorsi di piegatura più rapidi, robusti o facili da controllare. Gli autori sostengono che tali paesaggi potrebbero alimentare futuri strumenti di apprendimento automatico che progettano automaticamente reti e sequenze di piegatura per nuovi dispositivi, contribuendo a trasformare la piegatura in una strategia di produzione prevedibile e programmabile.
Citazione: Neves, J.C., Marques, B.R., Dias, C.S. et al. Mapping the discrete folding landscape. Commun Phys 9, 153 (2026). https://doi.org/10.1038/s42005-026-02554-2
Parole chiave: ingegneria origami, materiali auto-pieganti, reti di poliedri, algoritmi basati su grafi, percorsi di piegatura