Clear Sky Science · es
Mapeando el paisaje discreto del plegado
De hojas planas a formas inteligentes
Imagínese construir robots, dispositivos médicos o incluso telescopios espaciales no atornillando piezas, sino plegando una única hoja plana para que se despliegue sola en la forma deseada. Este estudio aborda un problema clave detrás de esa visión: cómo comprender todas las maneras posibles en que un patrón plano puede plegarse en un objeto tridimensional, incluidas las múltiples formas en que puede fallar, para que los ingenieros diseñen procesos de plegado más rápidos, limpios y fiables.
Por qué el plegado importa en la tecnología moderna
El plegado ya no es solo un arte; se está convirtiendo en una estrategia práctica de fabricación a distintas escalas, desde estructuras nanométricas basadas en ADN hasta satélites desplegables de metros. Transformar materiales planos en formas complejas reduce residuos, evita pegamentos y soldaduras, y funciona bien con técnicas como el corte por láser y la impresión 3D. Los materiales plegados pueden diseñarse para ser extremadamente rígidos, absorber impactos o cambiar de forma al calentarse o estirarse, por eso aparecen en robots blandos, implantes médicos y equipos espaciales. Pero para aprovechar plenamente el plegado, los diseñadores necesitan conocer no solo las formas inicial y final, sino cada paso intermedio.
El reto de las demasiadas formas de plegar
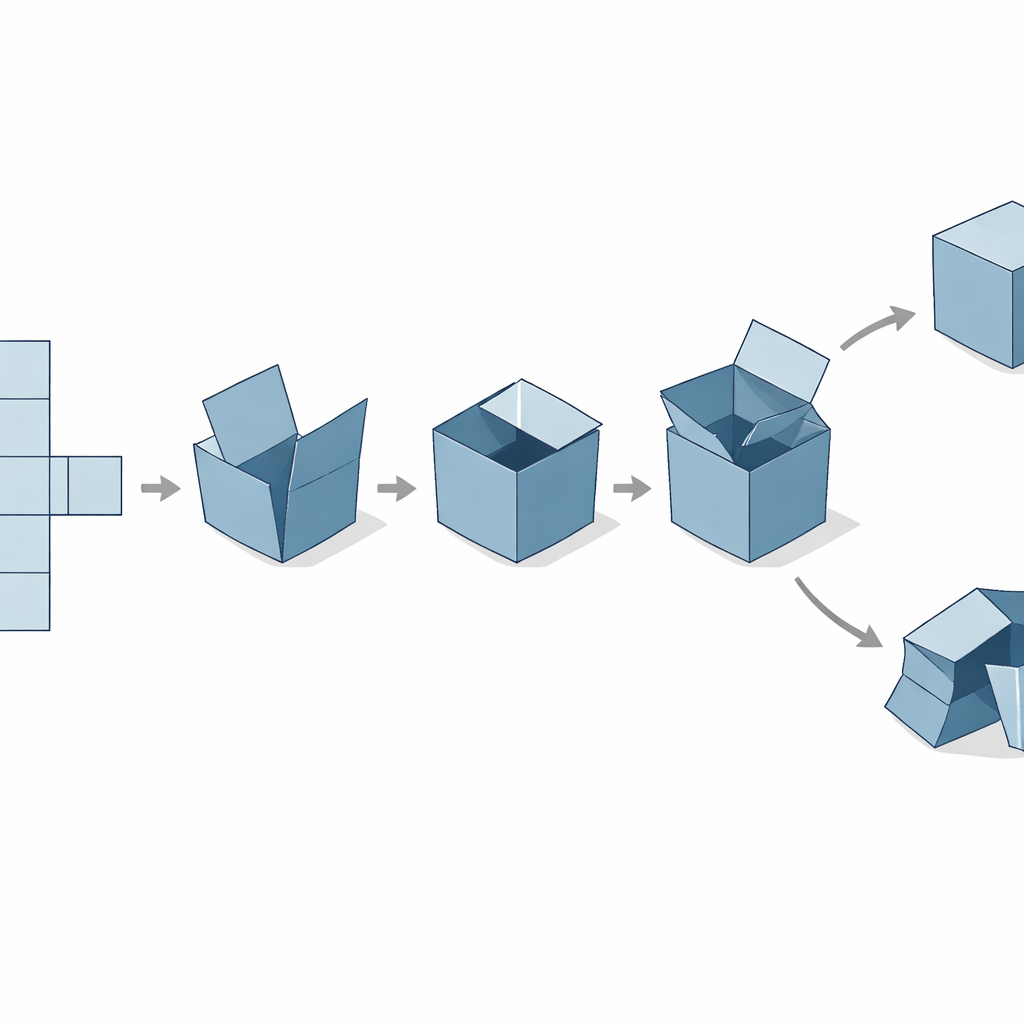
Diseñar un objeto plegable comienza con una plantilla plana, llamada red, que puede cortarse y plegarse en una forma objetivo como un cubo o un poliedro más complejo. En principio, podría listarse cada forma de cortar y plegar a lo largo de los bordes, pero el número de secuencias posibles se dispara según aumentan los bordes. Incluso un cubo simple ya tiene miles de órdenes de corte posibles, y las formas mayores alcanzan decenas de millones. Muchas de estas secuencias son efectivamente equivalentes o nunca permiten que una cara se libere realmente. Los enfoques existentes o bien muestrean solo las rutas más probables, o simulan el plegado directamente y corren el riesgo de perder trayectorias raras pero importantes, dejando a los diseñadores sin un mapa completo del proceso de plegado.
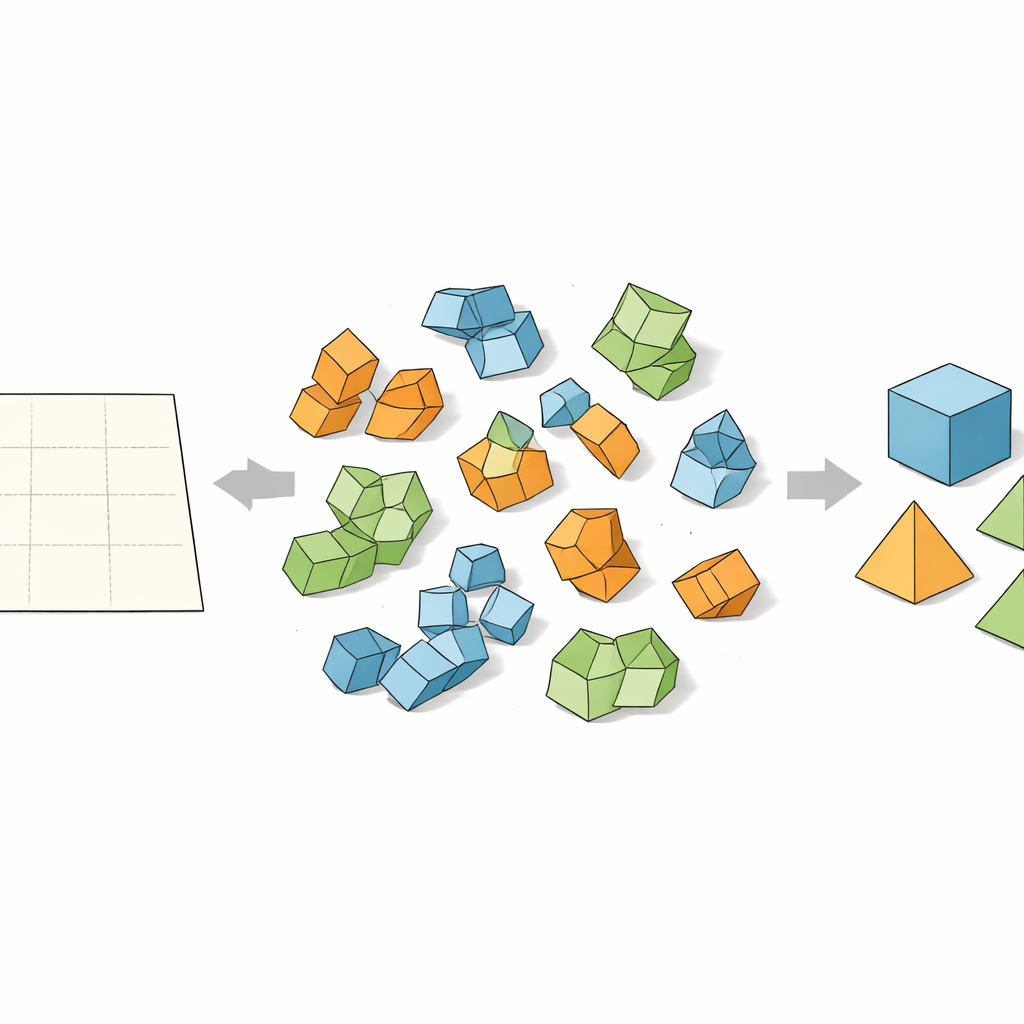
Convertir formas en redes
Los autores resuelven esto traduciendo cada forma tridimensional y sus plantillas planas en grafos, donde las caras se convierten en nodos y los bordes compartidos en enlaces. Cortar un borde equivale a eliminar un enlace, mientras que plegar o desplegar cambia cómo las caras pueden moverse entre sí. Partiendo de un poliedro plegado y su red, el algoritmo elimina sistemáticamente enlaces en todas las combinaciones relevantes, pero las organiza de forma inteligente para evitar trabajo redundante. Cada patrón distinto de caras conectadas se codifica como un código binario único, lo que permite comprobar duplicados con rapidez. El método agrupa entonces configuraciones detalladas en “estados de plegado” más amplios, definidos por qué aristas permiten realmente el movimiento de las caras, y construye una red dirigida que captura cómo un estado puede seguir a otro conforme se añaden cortes.
Ver cada ruta, incluidas las equivocadas
Usando el cubo como caso de prueba, el algoritmo recupera las once redes conocidas y encuentra dieciocho estados intermedios de plegado distintos, enlazados en un «paisaje de plegado» completo. Este paisaje muestra cada ruta desde el patrón plano hasta el cubo terminado y cómo distintas redes comparten muchas de las mismas formas intermedias. El método se extiende de forma natural a situaciones más complejas, como plantillas que pueden plegarse en más de una estructura final, y a los malplegados, donde paneles se bloquean de modo que impiden que la forma prevista se cierre. Al insertar estas estructuras malplegadas en el análisis, los autores revelan qué secuencias de cortes y pliegues tienden a atrapar el sistema y cómo rutas alternativas pueden esquivar estos callejones sin salida.
Diseñar mejores plegados para dispositivos reales
En términos sencillos, el estudio ofrece una forma de dibujar un mapa completo de cómo un patrón plano puede plegarse, incluyendo todos los caminos secundarios y giros erróneos. Este mapa es independiente del material o la escala, por lo que aplica por igual a nanoestructuras autoensamblables impulsadas por movimiento térmico y a robots inspirados en origami de gran tamaño accionados por motores. Una vez conocido el mapa, los ingenieros pueden añadir tasas físicas o costes a cada paso, convirtiéndolo en una herramienta para elegir rutas de plegado más rápidas, robustas o fáciles de controlar. Los autores sostienen que tales paisajes podrían alimentar futuras herramientas de aprendizaje automático que diseñen automáticamente redes y secuencias de plegado para nuevos dispositivos, ayudando a convertir el plegado en una estrategia de fabricación predecible y programable.
Cita: Neves, J.C., Marques, B.R., Dias, C.S. et al. Mapping the discrete folding landscape. Commun Phys 9, 153 (2026). https://doi.org/10.1038/s42005-026-02554-2
Palabras clave: ingeniería origami, materiales auto‑plegables, redes de poliedros, algoritmos basados en grafos, rutas de plegado