Clear Sky Science · he
מיפוי נוף הקיפולים הדיסקרטיים
מדפי שטוחים לצורות חכמות
דמיינו בניית רובוטים, מכשירים רפואיים או אפילו טלסקופים לחלל לא על‑ידי הברגת חלקים, אלא על‑ידי קיפול גיליון שטוח יחיד כך שיתפרץ לצורה בעצמו. המחקר הזה מתמודד עם בעיה מרכזית מאחורי החזון: כיצד להבין כל דרך אפשרית שבה תבנית שטוחה עשויה להתקפל לאובייקט תלת‑ממדי, כולל הדרכים שבהן הדברים משתבשים, כדי שאנשי ההנדסה יוכלו לתכנן תהליכי קיפול מהירים, נקיים ואמינים יותר.
מדוע קיפול חשוב בטכנולוגיה המודרנית
קיפול כבר אינו רק אמנות; הוא הופך לאסטרטגיית ייצור מעשית על פני קנה מידה רחב, מתחומי ננוטכנולוגיה מבוססת DNA ועד לווין נפרש מגדלים מטריים. הפיכת חומרים שטוחים לצורות מורכבות מצמצמת בזבוז, מונעת שימוש בדבק וריתוך, ומתאימה לטכניקות כמו חיתוך בלייזר והדפסת תלת‑ממד. חומרים מקופלים ניתנים לכוונון כך שיהיו קשים מאוד, יספגו זעזועים או ישנו צורה בחימום או מתיחה, ולכן הם מופיעים ברובוטיקה רכה, השתלים רפואיים וציוד חלל. אך כדי לרתום באמת את הקיפול, המעצבים זקוקים לא רק לצורות ההתחלה והסוף, אלא לכל שלב ביניהן.
האתגר של יותר מדי דרכי קיפול
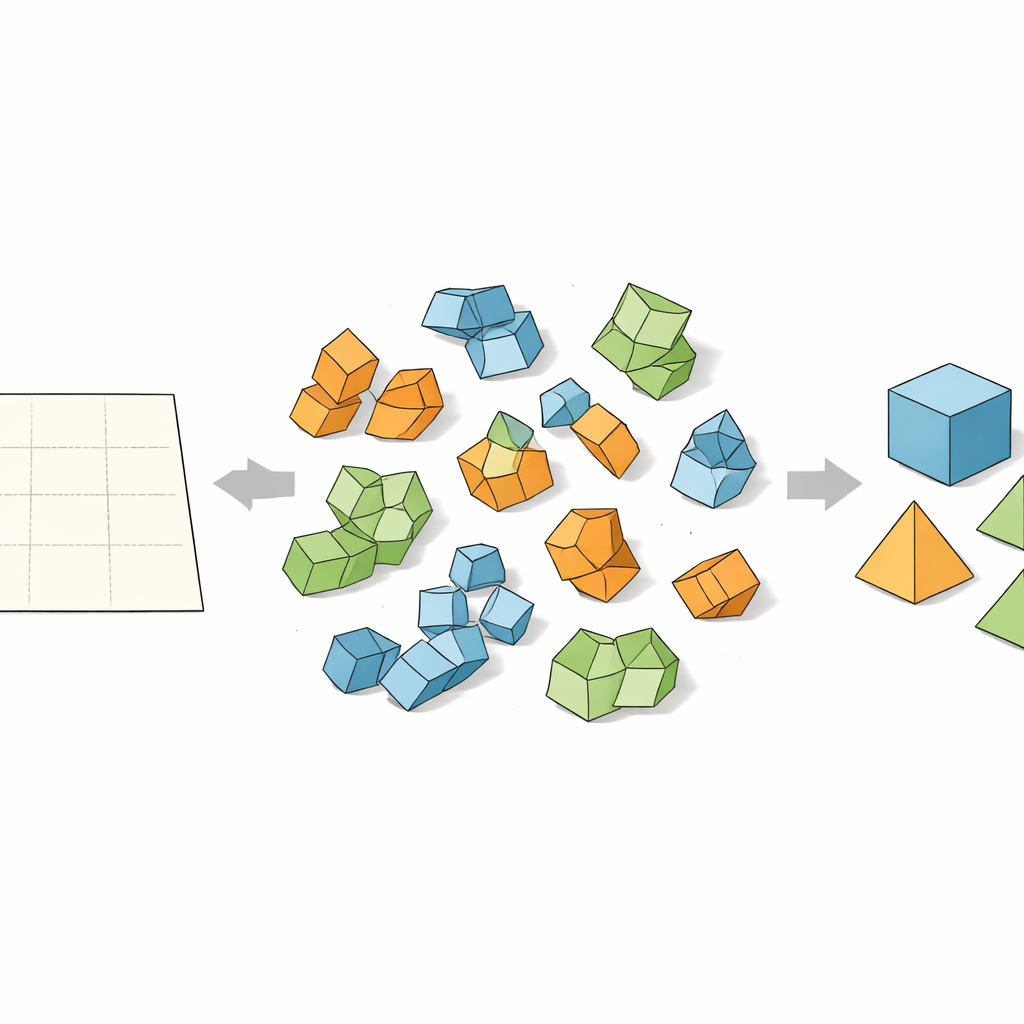
תכנון אובייקט מתקפל מתחיל בתבנית שטוחה, הנקראת רשת, שניתן לחתוך ולקפל אל צורה יעד כמו קוביה או פוליהדרון מורכב יותר. עקרונית ניתן לרשום כל דרך לחתוך ולקפל לאורך הקצוות, אך מספר הרצפים האפשריים מתפוצץ ככל שמעורבים יותר קצוות. גם לקוביה פשוטה יש כבר אלפי סדרי חיתוך אפשריים, וצורות גדולות יותר כוללות עשרות מיליוני אפשרויות. רבות מהסדרות הללו זהות בפועל או אף לא מאפשרות לפנים לנוע חופשי. גישות קיימות או שמדגמיות רק את המסלולים הסבירים ביותר, או שמדמות קיפול ישירות וסיכוין לפספס מסלולים נדירים אך חשובים, ומשאירות את המעצב ללא מפה מלאה של תהליך הקיפול.
הפיכת צורות לרשתות
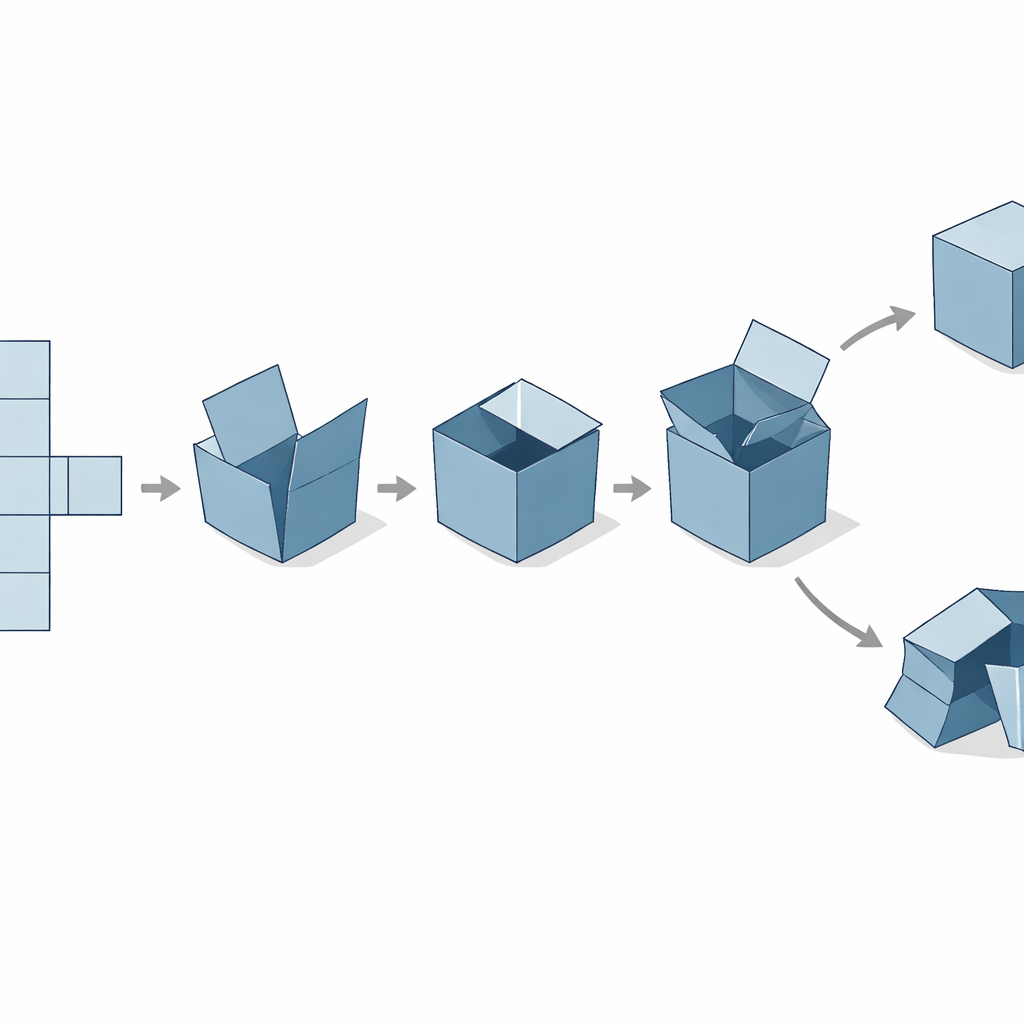
המחברים פותרים זאת על‑ידי תרגום כל צורה תלת‑ממדית ותבניותיה השטוחות לגרפים, שבהם הפנים הופכות לקודקודים והקצוות המשותפים לקישורים. חיתוך קצה מקביל להסרת קישור, בעוד קיפול או פתיחה משנים את האופן שבו הפנים יכולות לנוע זו סביב זו. מנקודה של פוליהדרון מקופל והרשת שלו, האלגוריתם מסיר שיטתי קישורים בכל הצירופים הרלוונטיים, אך מארגן זאת בחוכמה כדי להימנע מעבודה חוזרת. כל דפוס ייחודי של פנים מחוברות מקודד כקוד בינארי יחיד, מה שמאפשר בדיקות מהירות לזיהוי כפילויות. השיטה מרחיבה תצורות מפורטות ל"מצבי קיפול" רחבים יותר, המוגדרים לפי אילו קצוות מאפשרים בפועל תנועה של הפנים, ובונה רשת מכוונת שתופסת כיצד מצב אחד יכול לבוא אחרי אחר כשמוסיפים חיתוכים.
לראות כל דרך, כולל השגויות
באמצעות הקוביה כמקרה בדיקה, האלגוריתם משחזר את כל אחת מהאחת עשרה הרשתות הידועות ומאתר שמונה‑עשר מצבי ביניים מובחנים, המחוברים לנוף קיפולים שלם. נוף זה מראה כל מסלול מרשת שטוחה לקוביה גמורה, וכיצד רשתות שונות חולקות רבות מאותן צורות ביניים. השיטה מתאימה באופן טבעי גם למצבים מסובכים יותר, כגון תבניות שיכולות להתקפל לכמה מבנים סופיים, ולשגיאות קיפול שבהן פאנלים ננעלים כך שהצורה המיועדת אינה יכולה להיסגר. על‑ידי הכנסת מבנים משגויים אלה לניתוח, המחברים מגלים אילו רצפים של חיתוכים וקיפולים נוטים ללכוד את המערכת וכיצד מסלולים אלטרנטיביים יכולים לעקוף את המבויים הסתומים האלה.
תכנון קיפול טוב יותר למכשירים אמיתיים
פשוטו כמשמעו, המחקר מספק דרך לצייר מפה מלאה של האופן שבו תבנית שטוחה יכולה להתקפל, כולל כל דרכי העקיפה ופניות השגויות. המפה בלתי תלויה בחומר או בקנה המידה, ולכן חלה באותה מידה על ננו־מבנים המתאספים עצמם באמצעות תנועה תרמית ועל רובוטים גדולי ממדים בהשראת אוריגמי המונעים על‑ידי מנועים. ברגע שהמפה ידועה, מהנדסים יכולים לשייך קצבים פיזיקליים או עלויות לכל צעד, ולהפוך אותה לכלי לבחירת מסלולי קיפול מהירים יותר, חסינים יותר או נוחים יותר לשליטה. המחברים טוענים שנופים כאלה יכולים להזין כלים של למידת מכונה בעתיד שיעצבו אוטומטית רשתות ורצפי קיפול למכשירים חדשים, ולסייע להפוך את הקיפול לאסטרטגיית ייצור ניתנת לחיזוי ותכנות.
ציטוט: Neves, J.C., Marques, B.R., Dias, C.S. et al. Mapping the discrete folding landscape. Commun Phys 9, 153 (2026). https://doi.org/10.1038/s42005-026-02554-2
מילות מפתח: הנדסת אוריגמי, חומרים המתכופפים בעצמם, רשתות פוליהדרון, אלגוריתמים מבוססי גרפים, מסלולי קיפול