Clear Sky Science · fr
Cartographier le paysage discret du pliage
Des feuilles plates aux formes intelligentes
Imaginez construire des robots, des dispositifs médicaux ou même des télescopes spatiaux non pas en assemblant des pièces, mais en pliant une seule feuille plate qui prendrait sa forme toute seule. Cette étude s’attaque à un problème clé derrière cette vision : comprendre toutes les manières possibles dont un motif plat peut se replier en un objet tridimensionnel, y compris les nombreuses façons dont cela peut échouer, afin que les ingénieurs puissent concevoir des processus de pliage plus rapides, plus propres et plus fiables.
Pourquoi le pliage compte dans la technologie moderne
Le pliage n’est plus seulement un art ; il devient une stratégie de fabrication pratique à toutes les échelles, des nanostructures à base d’ADN aux satellites déployables de plusieurs mètres. Transformer des matériaux plats en formes complexes réduit les déchets, évite la colle et la soudure, et s’accorde bien avec des techniques comme la découpe laser et l’impression 3D. Les matériaux pliés peuvent être réglés pour être extrêmement rigides, absorber des chocs ou changer de forme lorsqu’ils sont chauffés ou étirés, ce qui explique leur présence dans les robots mous, les implants médicaux et le matériel spatial. Mais pour exploiter pleinement le pliage, les concepteurs ont besoin de connaître non seulement les formes de départ et d’arrivée, mais chaque étape intermédiaire.
Le défi du trop grand nombre de façons de plier
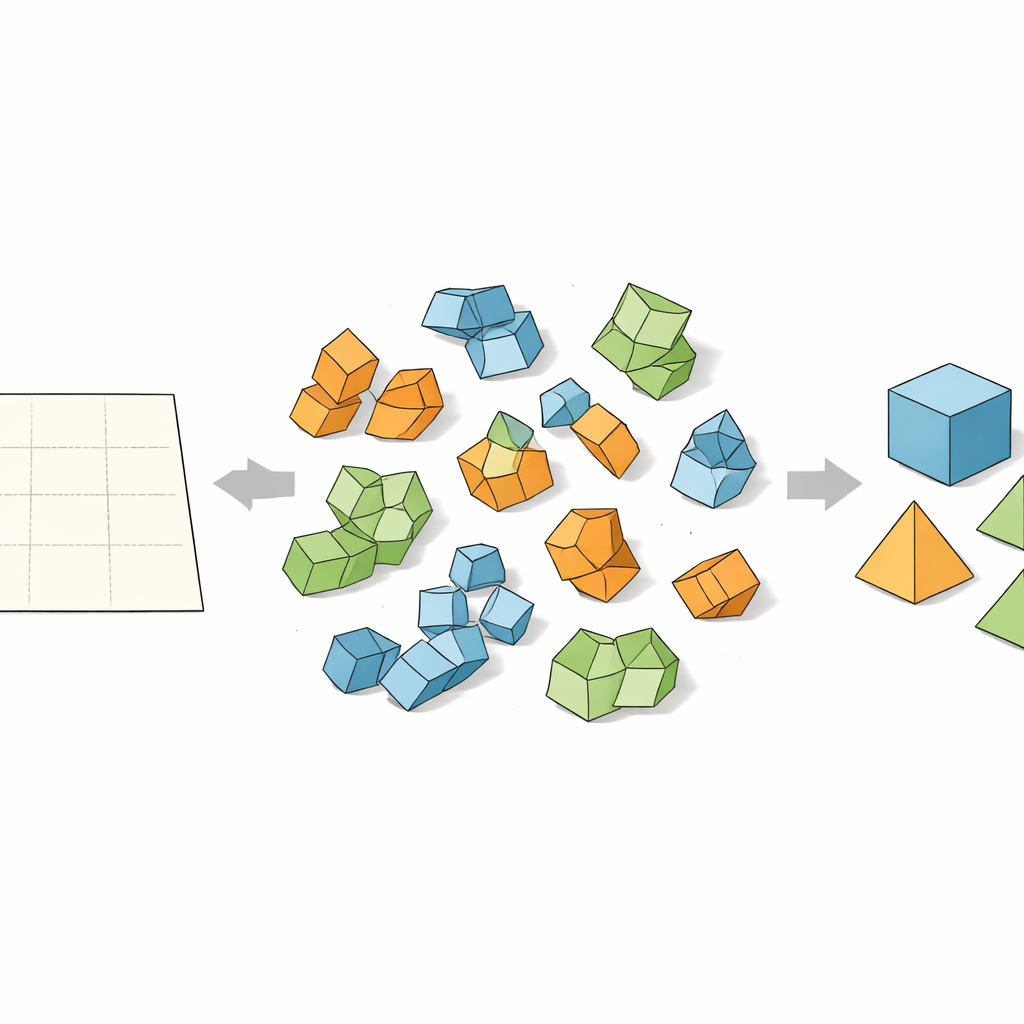
Concevoir un objet pliable commence par un gabarit plat, appelé un patron, qui peut être découpé et plié en une forme cible comme un cube ou un polyèdre plus complexe. En principe, on pourrait énumérer chaque façon de découper et de plier le long des arêtes, mais le nombre de séquences possibles explose à mesure que le nombre d’arêtes augmente. Même un cube simple possède déjà des milliers d’ordres de découpe possibles, et des formes plus grandes en comptent des dizaines de millions. Beaucoup de ces séquences sont en fait équivalentes ou n’autorisent jamais une face à se libérer réellement. Les approches existantes échantillonnent soit seulement les routes les plus probables, soit simulent directement le pliage en risquant de manquer des chemins rares mais importants, laissant les concepteurs sans carte complète du processus de pliage.
Transformer les formes en réseaux
Les auteurs résolvent ceci en traduisant chaque forme tridimensionnelle et ses patrons plats en graphes, où les faces deviennent des nœuds et les arêtes partagées des liens. Couper une arête correspond à supprimer un lien, tandis que le pliage ou le dépliage modifie la façon dont les faces peuvent se déplacer les unes par rapport aux autres. À partir d’un polyèdre plié et de son patron, l’algorithme supprime systématiquement les liens dans toutes les combinaisons pertinentes, mais les organise intelligemment pour éviter les travaux répétitifs. Chaque motif distinct de faces connectées est encodé sous forme d’un code binaire unique, ce qui permet des vérifications rapides des doublons. La méthode regroupe ensuite les configurations détaillées en « états de pliage » plus larges, définis par les arêtes qui autorisent effectivement le mouvement des faces, et construit un réseau orienté qui capture comment un état peut suivre un autre à mesure que des découpes sont ajoutées.
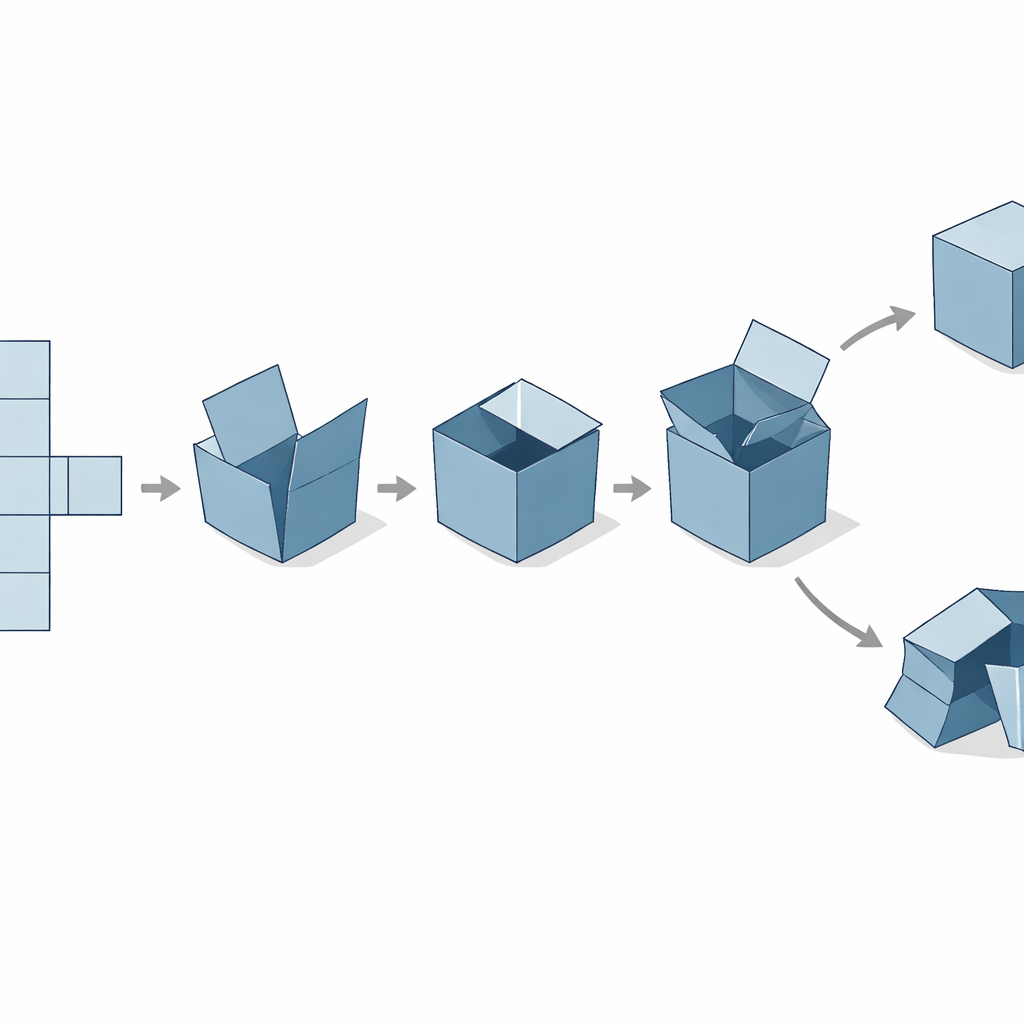
Voir chaque chemin, y compris les mauvais
En utilisant le cube comme cas test, l’algorithme retrouve les onze patrons connus et identifie dix-huit états intermédiaires distincts, reliés en un « paysage de pliage » complet. Ce paysage montre chaque route du motif plat au cube fini, et comment différents patrons partagent de nombreuses formes intermédiaires. La méthode s’étend naturellement à des situations plus complexes, comme des patrons pouvant se replier en plus d’une structure finale, et aux mauvais plis, où des panneaux se bloquent de façon à empêcher la fermeture prévue. En intégrant ces structures mal pliées à l’analyse, les auteurs révèlent quelles séquences de découpes et de plis ont tendance à piéger le système et comment des chemins alternatifs peuvent contourner ces impasses.
Concevoir de meilleurs pliages pour des dispositifs réels
En termes simples, l’étude fournit un moyen de tracer une carte complète de la manière dont un motif plat peut se replier, incluant tous les détours et les erreurs. Cette carte est indépendante du matériau ou de l’échelle, elle s’applique donc aussi bien aux nanostructures auto-assemblantes entraînées par le mouvement thermique qu’aux robots inspirés de l’origami et motorisés. Une fois la carte connue, les ingénieurs peuvent affecter des vitesses ou des coûts physiques à chaque étape, la transformant en un outil pour choisir des chemins de pliage plus rapides, plus robustes ou plus faciles à contrôler. Les auteurs soutiennent que de tels paysages pourraient alimenter de futurs outils d’apprentissage automatique qui conçoivent automatiquement des patrons et des séquences de pliage pour de nouveaux dispositifs, contribuant à faire du pliage une stratégie de fabrication prévisible et programmable.
Citation: Neves, J.C., Marques, B.R., Dias, C.S. et al. Mapping the discrete folding landscape. Commun Phys 9, 153 (2026). https://doi.org/10.1038/s42005-026-02554-2
Mots-clés: génie de l’origami, matériaux auto-pliants, patrons de polyèdres, algorithmes basés sur des graphes, chemins de pliage