Clear Sky Science · pt
YOLO11-BSCS: uma estrutura otimizada por atenção aprimorada para detecção em tempo real de chamas e fumaça internas em robôs móveis de cuidados a idosos
Por que a segurança contra incêndios para idosos precisa de ajudantes mais inteligentes
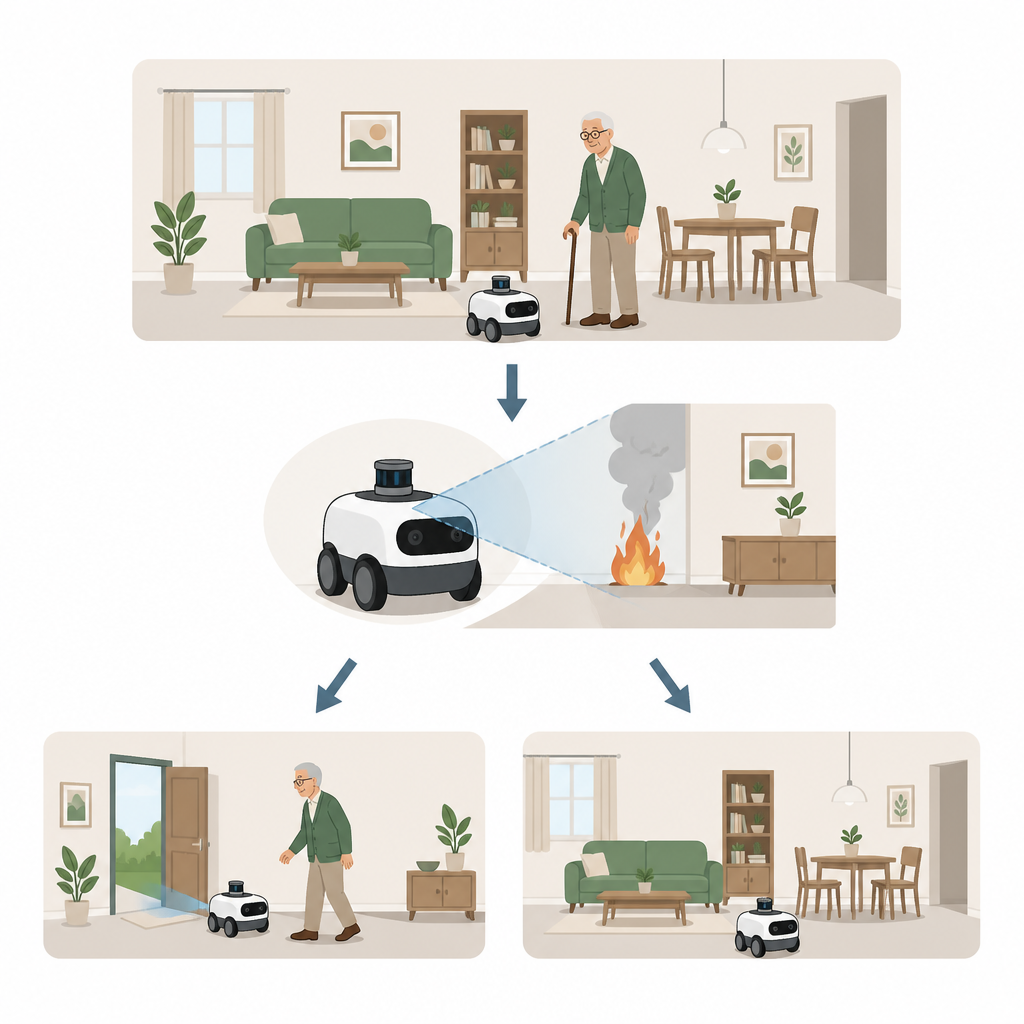
Mais pessoas idosas vivem em casa com mobilidade limitada, muitas vezes passando longas horas sozinhas em ambientes internos. Uma pequena chama na cozinha ou um fiapo de fumaça pode se transformar rapidamente em um incêndio com risco de vida, especialmente para quem se desloca devagar ou usa dispositivos de apoio. Este estudo investiga como dotar robôs móveis assistentes de olhos mais atentos para detectar chamas e fumaça dentro de casa a tempo de avisar e guiar idosos vulneráveis para um local seguro.
Robôs que vigiam o lar
Os pesquisadores concentram-se em robôs de mobilidade projetados para auxiliar pessoas idosas com deficiência nas atividades diárias. Além de transportar objetos ou oferecer companhia, esses robôs podem patrulhar cômodos com câmeras integradas, atuando como guardas de segurança móveis. O fogo é um risco importante nesse contexto, com muitas mortes associadas à detecção tardia. Ao contrário de detectores de fumaça fixos, um robô móvel pode olhar diretamente para fogões, tomadas e outros pontos perigosos, mesmo em cômodos desordenados ou em mudança. Para ser realmente útil, contudo, seu sistema de visão precisa identificar pequenas chamas em estágio inicial e fumaça tênue em tempo real, enquanto roda com poder computacional limitado a bordo.
Ensinando um robô a ver fogo e fumaça
Robôs modernos de vigilância contra incêndio dependem de aprendizado profundo, no qual um modelo de computador aprende padrões a partir de milhares de imagens em vez de seguir regras escritas à mão. A equipe parte de um sistema de visão recente chamado YOLO11s, conhecido por escanear imagens rapidamente em uma única passada. Eles criam uma versão aprimorada chamada YOLO11 BSCS, ajustada especificamente para chamas e fumaça internas. Para treiná-la, reúnem uma grande coleção de imagens a partir de bancos de dados laboratoriais, da web e de cenas internas cuidadosamente encenadas, como cozinhas, quartos e apartamentos para idosos. As fotos capturam chamas e fumaça em vários tamanhos, ângulos e condições de iluminação, e são ampliadas por rotações, ruído e conversão para tons de cinza para que o modelo lide com vistas borradas ou incomuns.
Dando ao robô foco mais nítido e raciocínio mais rápido
O avanço central do YOLO11 BSCS reside em três melhorias que, em conjunto, tornam o robô mais preciso e mais eficiente. Primeiro, um módulo de atenção ajuda o sistema a concentrar-se em regiões visuais importantes, como línguas de chama finas ou fumaça tênue atravessando um fundo movimentado, em vez de tratar cada pixel igualmente. Segundo, um conjunto redesenhado de convoluções elimina informações de imagem repetitivas ou de baixo valor, tanto no espaço quanto nos canais de cor. Isso reduz o número de cálculos internos, melhorando a velocidade sem descartar detalhes úteis. Terceiro, a equipe refina a forma como o modelo aprende a desenhar caixas ao redor dos perigos, usando uma regra de treinamento que equilibra melhor posição, tamanho e forma das caixas, de modo que as detecções se alinhem mais precisamente com as áreas reais de fogo e fumaça.
Colocando o novo sistema de visão à prova
Para verificar se essas mudanças fazem diferença na prática, os autores comparam o YOLO11 BSCS com modelos de detecção bem conhecidos, incluindo várias versões do YOLO e o amplamente usado Faster R CNN. Todos os sistemas são treinados e testados nos mesmos conjuntos de imagens de incêndio internas, e cada experimento é repetido várias vezes com diferentes inicializações aleatórias para garantir resultados estáveis. O modelo aprimorado alcança maior precisão, significando menos alarmes falsos, e maior recall, isto é, menos perigos perdidos. Sua medida global de desempenho, que equilibra ambos, sobe alguns pontos percentuais acima do YOLO11s original, mesmo usando menos parâmetros do que muitos modelos rivais. Testes adicionais em imagens novas de cômodos não vistos anteriormente mostram que o sistema continua a detectar chamas e fumaça de forma confiável, indicando boa generalização além dos dados de treinamento.

O que isso significa para cuidados domésticos mais seguros
Em termos simples, o estudo mostra que um sistema de visão cuidadosamente ajustado pode ajudar robôs de assistência interna a notar fogo e fumaça mais cedo e com mais confiabilidade, sem exigir hardware computacional pesado. O YOLO11 BSCS permite que um robô escaneie cômodos rapidamente, foque em chamas pequenas ou parcialmente ocultas e emita alarmes ou orientações em tempo hábil para residentes que possam ter dificuldade para escapar sozinhos. Embora sejam necessários trabalhos adicionais para testar o sistema em dispositivos reais e ampliá-lo para outros perigos, esta pesquisa aponta para um futuro em que ajudantes móveis patrulham discretamente nossos lares, oferecendo uma camada extra de segurança para alguns dos membros mais vulneráveis da sociedade.
Citação: Wang, Y., Wang, Y., Wei, Z. et al. YOLO11-BSCS: an enhanced attention-optimized framework for real-time indoor flame and smoke detection in elderly care mobile robots. Sci Rep 16, 14956 (2026). https://doi.org/10.1038/s41598-026-45957-5
Palavras-chave: detecção de incêndio interna, robôs para cuidados de idosos, reconhecimento de fumaça, visão por aprendizado profundo, monitoramento de segurança em tempo real