Clear Sky Science · fr
YOLO11-BSCS : un cadre optimisé par attention pour la détection en temps réel de flammes et de fumée en intérieur par des robots mobiles de soins aux personnes âgées
Pourquoi la sécurité incendie pour les seniors exige des aides plus intelligentes
Un nombre croissant de personnes âgées vivent chez elles avec une mobilité réduite, passant souvent de longues heures seules à l’intérieur. Une petite flamme de cuisine ou un filet de fumée peut rapidement devenir un incendie mortel, en particulier pour des personnes qui se déplacent lentement ou utilisent des aides à la marche. Cette étude examine comment doter les robots mobiles d’auxiliaires d’un regard plus aigu pour repérer les flammes et la fumée en intérieur suffisamment tôt afin d’alerter et de guider les personnes vulnérables vers un lieu sûr.
Des robots qui veillent sur le domicile
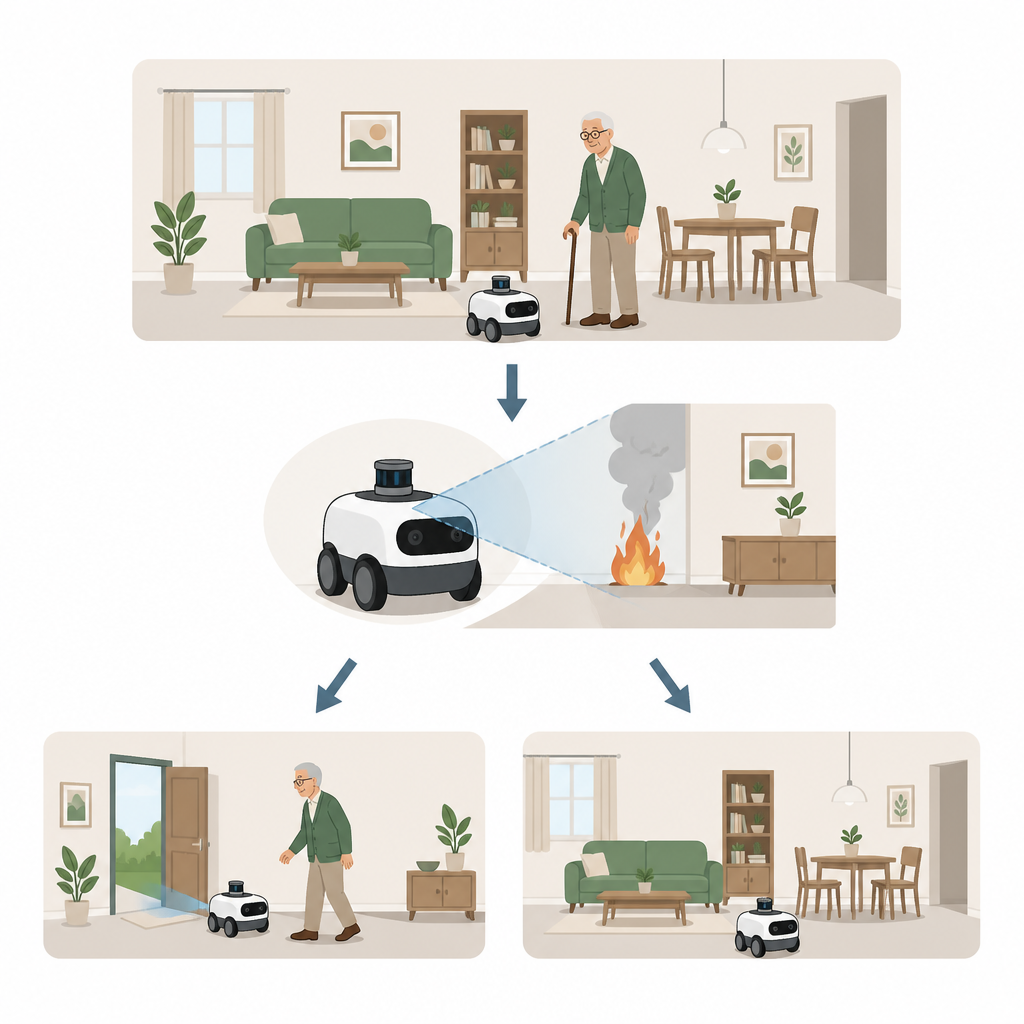
Les chercheurs se concentrent sur des robots mobiles conçus pour aider les personnes âgées handicapées dans la vie quotidienne. Au-delà du transport d’objets ou de la compagnie, ces robots peuvent patrouiller les pièces avec des caméras intégrées, agissant comme des gardiens de sécurité mobiles. L’incendie représente un risque majeur dans ces contextes, de nombreux décès étant liés à une détection tardive. À la différence des détecteurs de fumée fixes, un robot mobile peut regarder directement les plaques de cuisson, les prises et d’autres points dangereux, même dans des pièces encombrées ou en changement. Pour être réellement utile, toutefois, son système de vision doit repérer de petites flammes en phase initiale et une fumée faible en temps réel tout en fonctionnant sur une puissance de calcul embarquée limitée.
Apprendre à un robot à voir le feu et la fumée
Les robots de surveillance modernes s’appuient sur l’apprentissage profond, où un modèle informatique apprend des motifs à partir de milliers d’images au lieu de suivre des règles codées à la main. L’équipe s’appuie sur un système de vision récent appelé YOLO11s, connu pour analyser les images rapidement en une seule passe. Ils créent une version améliorée nommée YOLO11 BSCS, spécialement ajustée pour les flammes et la fumée en intérieur. Pour l’entraîner, ils rassemblent une grande collection d’images provenant de bases de données de laboratoire, du web et de scènes intérieures soigneusement mises en scène comme des cuisines, des chambres et des appartements de seniors. Les images capturent des flammes et de la fumée à de nombreuses tailles, angles et conditions d’éclairage, et sont augmentées par rotation, bruit et conversion en niveaux de gris afin que le modèle puisse gérer des vues floues ou inhabituelles.
Donner au robot une mise au point plus nette et une réflexion plus rapide
La principale avancée de YOLO11 BSCS réside dans trois améliorations qui rendent l’agent à la fois plus précis et plus efficace. Premièrement, un module d’attention aide le système à se concentrer sur les régions visuelles importantes, comme de fines langues de flamme ou une fumée légère traversant un arrière-plan chargé, plutôt que de traiter chaque pixel de la même façon. Deuxièmement, un jeu de convolutions repensé élimine les informations d’image répétitives ou de faible valeur à la fois dans l’espace et dans les canaux de couleur. Cela réduit le nombre de calculs internes, améliorant la vitesse sans éliminer les détails utiles. Troisièmement, l’équipe affine la manière dont le modèle apprend à tracer des boîtes autour des dangers, en utilisant une règle d’entraînement qui équilibre mieux la position, la taille et la forme des boîtes, afin que les détections correspondent plus étroitement aux zones réelles de feu et de fumée.
Mettre le nouveau système de vision à l’épreuve
Pour vérifier si ces changements ont un impact en pratique, les auteurs comparent YOLO11 BSCS à des modèles de détection bien connus, incluant plusieurs versions de YOLO et le largement utilisé Faster R-CNN. Tous les systèmes sont entraînés et testés sur les mêmes ensembles d’images d’incendies intérieurs, et chaque expérience est répétée plusieurs fois avec des initialisations aléatoires différentes pour assurer des résultats stables. Le modèle amélioré atteint une précision plus élevée, signifiant moins de fausses alertes, et un rappel plus élevé, signifiant moins de dangers manqués. Sa mesure globale, qui équilibre les deux, monte de plusieurs points de pourcentage par rapport au YOLO11s original, tout en utilisant moins de paramètres que de nombreux modèles concurrents. Des tests supplémentaires sur de nouvelles images provenant de pièces non vues auparavant montrent que le système détecte toujours les flammes et la fumée de façon fiable, indiquant une bonne capacité de généralisation au-delà des données d’entraînement.

Ce que cela signifie pour des soins à domicile plus sûrs
Concrètement, l’étude montre qu’un système de vision soigneusement réglé peut aider les robots de soins intérieurs à remarquer le feu et la fumée plus tôt et de façon plus fiable, sans exiger un matériel informatique coûteux. YOLO11 BSCS permet à un robot d’analyser rapidement les pièces, de se verrouiller sur des flammes et une fumée petites ou partiellement cachées, et de soutenir des alarmes ou des guidages en temps utile pour des résidents qui pourraient avoir du mal à s’échapper seuls. Bien que des travaux supplémentaires soient nécessaires pour tester le système sur des appareils réels et l’étendre à d’autres dangers, cette recherche ouvre la voie à un futur où des aides mobiles patrouillent discrètement nos maisons, apportant une couche supplémentaire de sécurité pour certains des membres les plus vulnérables de la société.
Citation: Wang, Y., Wang, Y., Wei, Z. et al. YOLO11-BSCS: an enhanced attention-optimized framework for real-time indoor flame and smoke detection in elderly care mobile robots. Sci Rep 16, 14956 (2026). https://doi.org/10.1038/s41598-026-45957-5
Mots-clés: détection incendie intérieure, robots de soins aux personnes âgées, reconnaissance de fumée, vision par apprentissage profond, surveillance de sécurité en temps réel