Clear Sky Science · it
YOLO11-BSCS: un framework ottimizzato con attenzione migliorata per il rilevamento in tempo reale di fiamme e fumo indoor nei robot mobili per l’assistenza agli anziani
Perché la sicurezza antincendio per gli anziani richiede aiutanti più intelligenti
Un numero crescente di persone anziane vive a casa con mobilità ridotta, spesso trascorrendo molte ore da sole in ambienti interni. Una piccola fiamma in cucina o una scia di fumo possono rapidamente trasformarsi in un incendio pericoloso per la vita, specialmente per chi si muove lentamente o usa ausili per la deambulazione. Questo studio esplora come dotare i robot mobili assistenti di una vista più acuta per individuare fiamme e fumo indoor in tempo per avvisare e guidare le persone vulnerabili verso la salvezza.
Robot che sorvegliano la casa
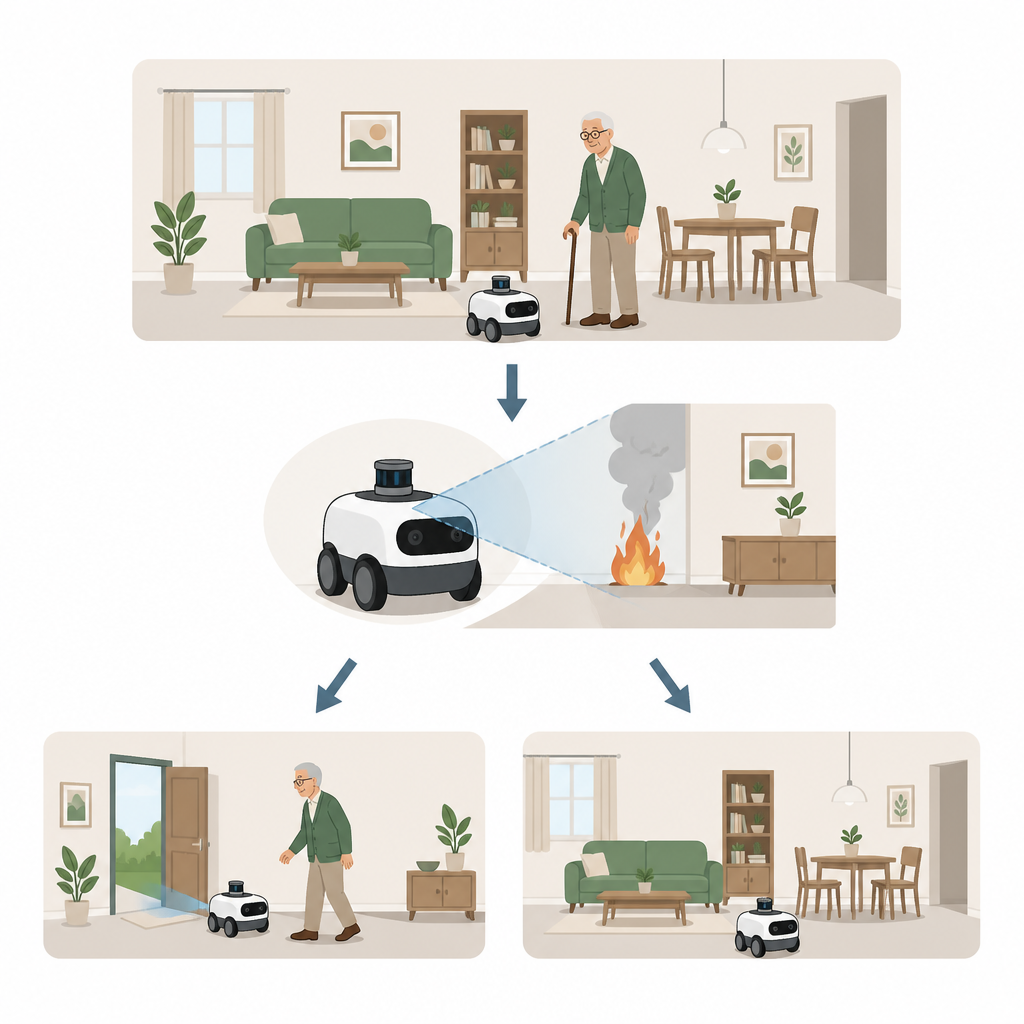
I ricercatori si concentrano su robot mobili progettati per assistere anziani disabili nelle attività quotidiane. Oltre a trasportare oggetti o offrire compagnia, questi robot possono pattugliare le stanze con telecamere integrate, agendo come guardiani di sicurezza in movimento. Il rischio di incendio è significativo in tali contesti, con molte vittime dovute a rilevamenti tardivi. Diversamente dai rilevatori di fumo fissi, un robot mobile può guardare direttamente fornelli, prese e altri punti a rischio, anche in stanze ingombre o in rapido cambiamento. Per essere davvero utile, tuttavia, il suo sistema di visione deve individuare fiamme di piccole dimensioni e fumo tenue nelle prime fasi, in tempo reale e con risorse di calcolo a bordo limitate.
Insegnare a un robot a vedere fuoco e fumo
I moderni robot antincendio si basano sul deep learning, dove un modello impara pattern da migliaia di immagini invece di seguire regole scritte a mano. Il team parte da un sistema visivo recente chiamato YOLO11s, noto per la capacità di scandire le immagini rapidamente in un’unica passata. Hanno creato una versione migliorata chiamata YOLO11 BSCS, tarata specificamente per fiamme e fumo indoor. Per addestrarla, assemblano un ampio archivio di immagini tratte da database di laboratorio, dal web e da scene indoor appositamente predisposte come cucine, camere da letto e appartamenti per anziani. Le foto catturano fiamme e fumo a diverse dimensioni, angolazioni e condizioni di illuminazione, e vengono ampliate tramite rotazione, aggiunta di rumore e conversione in scala di grigi in modo che il modello possa gestire viste sfocate o insolite.
Fornire al robot una messa a fuoco più nitida e un pensiero più veloce
Il progresso centrale di YOLO11 BSCS risiede in tre miglioramenti che insieme rendono il robot più accurato ed efficiente. Primo, un modulo di attenzione aiuta il sistema a concentrarsi sulle regioni visive importanti, come sottili lingue di fiamma o sottili banchi di fumo che si muovono su uno sfondo affollato, invece di trattare ogni pixel allo stesso modo. Secondo, un set ridisegnato di convoluzioni elimina informazioni d’immagine ripetitive o di scarso valore sia nello spazio che nei canali di colore. Questo riduce il numero di calcoli interni, migliorando la velocità senza perdere dettagli utili. Terzo, il team affina il modo in cui il modello impara a tracciare riquadri intorno ai pericoli, utilizzando una regola di addestramento che bilancia meglio posizione, dimensione e forma delle box, così le rilevazioni si allineano più strettamente con le aree reali di fiamma e fumo.
Mettere alla prova il nuovo sistema di visione
Per verificare se questi cambiamenti hanno impatto nella pratica, gli autori confrontano YOLO11 BSCS con modelli di rilevamento ben noti, incluse più versioni di YOLO e il largamente usato Faster R-CNN. Tutti i sistemi sono addestrati e testati sugli stessi set di immagini di incendi indoor, e ogni esperimento viene ripetuto più volte con diversi avvii casuali per garantire risultati stabili. Il modello migliorato raggiunge una precisione più alta, cioè meno falsi allarmi, e una recall superiore, cioè meno pericoli non rilevati. La sua misura complessiva, che bilancia entrambi gli aspetti, aumenta di diversi punti percentuali rispetto all’originale YOLO11s, pur usando meno parametri rispetto a molti modelli concorrenti. Test aggiuntivi su immagini nuove provenienti da stanze non viste prima mostrano che il sistema individua ancora fiamme e fumo in modo affidabile, indicando una buona capacità di generalizzazione oltre i dati di addestramento.

Cosa significa questo per una cura domestica più sicura
In termini pratici, lo studio dimostra che un sistema di visione accuratamente ottimizzato può aiutare i robot per l’assistenza indoor a notare fuoco e fumo più presto e con maggiore affidabilità, senza richiedere hardware di calcolo pesante. YOLO11 BSCS consente a un robot di scansionare rapidamente le stanze, individuare fiamme e fumo piccoli o parzialmente nascosti e supportare allarmi tempestivi o indicazioni per i residenti che potrebbero avere difficoltà a mettersi in salvo da soli. Pur richiedendo ulteriori verifiche su dispositivi reali e un ampliamento ad altri tipi di pericolo, questa ricerca indica un futuro in cui gli assistenti mobili pattugliano silenziosamente le nostre case, fornendo uno strato aggiuntivo di sicurezza per alcuni dei membri più vulnerabili della società.
Citazione: Wang, Y., Wang, Y., Wei, Z. et al. YOLO11-BSCS: an enhanced attention-optimized framework for real-time indoor flame and smoke detection in elderly care mobile robots. Sci Rep 16, 14956 (2026). https://doi.org/10.1038/s41598-026-45957-5
Parole chiave: rilevamento incendi indoor, robot per assistenza agli anziani, riconoscimento del fumo, visione con deep learning, monitoraggio della sicurezza in tempo reale