Clear Sky Science · pl
YOLO11-BSCS: ulepszony, zoptymalizowany pod uwagę model do wykrywania płomieni i dymu w czasie rzeczywistym w mobilnych robotach opiekuńczych dla seniorów
Dlaczego bezpieczeństwo pożarowe seniorów potrzebuje mądrzejszych asystentów
Coraz więcej starszych osób mieszka w domu z ograniczoną mobilnością, często spędzając długie godziny samotnie. Mały płomień w kuchni lub smużka dymu może szybko przerodzić się w pożar zagrażający życiu, szczególnie u osób poruszających się wolno lub korzystających z pomagających urządzeń. W tym badaniu analizuje się, jak wyposażyć mobilne roboty pomocnicze w bardziej ostre „oczy”, by wykrywały płomienie i dym wewnątrz budynków wystarczająco wcześnie, by ostrzec i poprowadzić osoby w podeszłym wieku do bezpiecznego miejsca.
Roboty, które czuwają nad domem
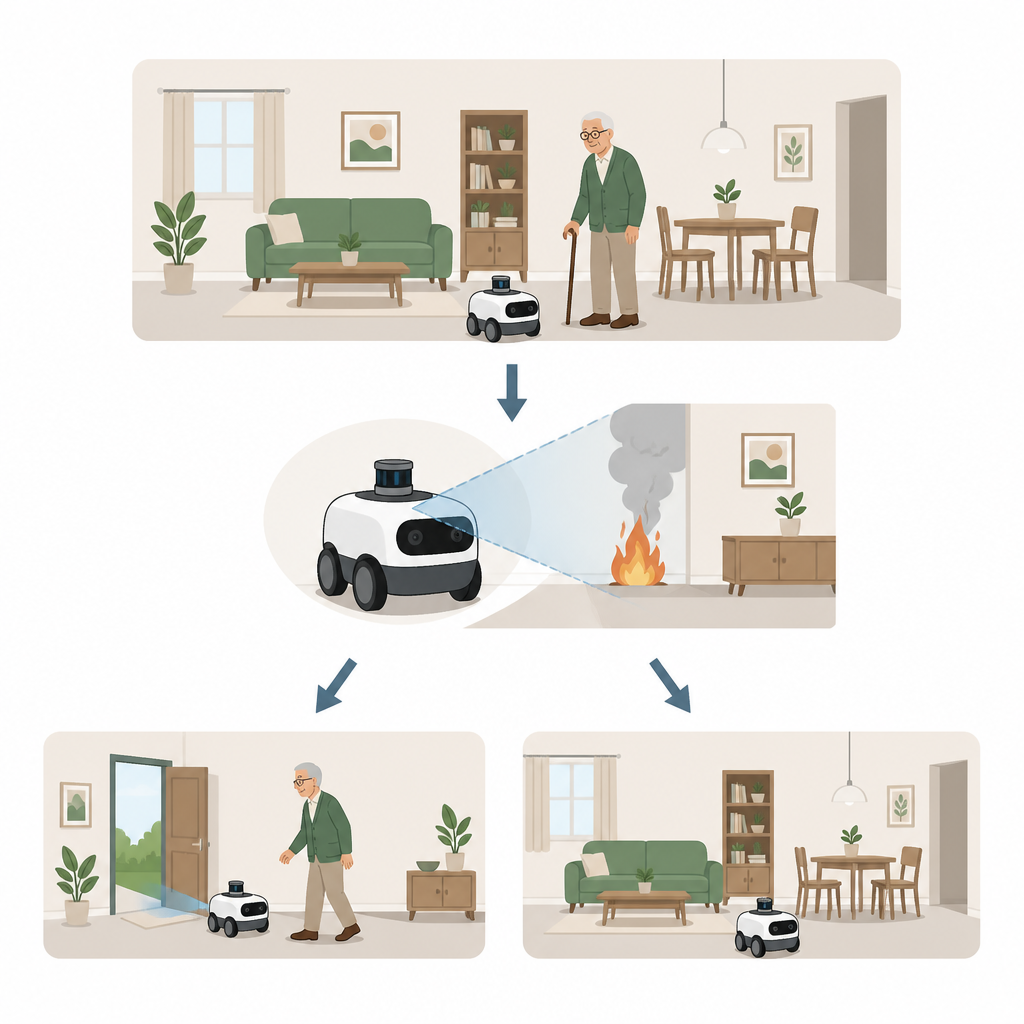
Badacze koncentrują się na robotach mobilnych zaprojektowanych do wspierania osób starszych z niepełnosprawnościami w codziennym życiu. Poza przenoszeniem przedmiotów czy towarzystwem, roboty te mogą patrolować pomieszczenia za pomocą wbudowanych kamer, pełniąc rolę ruchomych strażników bezpieczeństwa. Pożar stanowi znaczące ryzyko w takich warunkach, a wiele zgonów wiąże się z późnym wykryciem. W przeciwieństwie do stacjonarnych czujek dymu, robot mobilny może skierować wzrok bezpośrednio na kuchenkę, gniazdka i inne miejsca zagrożenia, nawet w zagraconych lub zmieniających się pomieszczeniach. By był naprawdę użyteczny, jego system wizyjny musi jednak wykrywać małe, wczesne płomienie i słaby dym w czasie rzeczywistym, działając na ograniczonej mocy obliczeniowej pokładowego sprzętu.
Nauka robota widzenia ognia i dymu
Współczesne roboty obserwujące ogień polegają na głębokim uczeniu, gdzie model komputerowy uczy się wzorców z tysięcy obrazów zamiast stosować ręcznie pisane reguły. Zespół buduje na bazie niedawnego systemu wizji nazwanego YOLO11s, znanego z szybkiego skanowania obrazów w pojedynczym przejściu. Stworzyli ulepszoną wersję nazwaną YOLO11 BSCS, dostrojoną specjalnie do wykrywania płomieni i dymu wewnątrz budynków. Do treningu zebrali dużą kolekcję zdjęć z laboratoriów, z Internetu oraz z celowo przygotowanych scen wewnętrznych, takich jak kuchnie, sypialnie i mieszkania seniorów. Zdjęcia obejmują płomienie i dym w różnych rozmiarach, kątach i warunkach oświetlenia, a także zostały rozszerzone przez rotacje, dodanie szumów i konwersję do skali szarości, aby model radził sobie z rozmytymi lub nietypowymi widokami.
Nadanie robotowi ostrzejszej ostrości i szybszego myślenia
Główne osiągnięcie YOLO11 BSCS polega na trzech ulepszeniach, które razem sprawiają, że robot jest zarówno dokładniejszy, jak i bardziej wydajny. Po pierwsze moduł uwagi pomaga systemowi koncentrować się na istotnych regionach obrazu, takich jak wąskie języki płomienia czy cienkie smugi dymu przemieszczające się na zatłoczonym tle, zamiast traktować każdy piksel jednakowo. Po drugie przeprojektowany zestaw splotów usuwa powtarzające się lub mało wartościowe informacje obrazu w przestrzeni i kanałach kolorów. To zmniejsza liczbę wewnętrznych obliczeń, poprawiając szybkość bez utraty przydatnych detali. Po trzecie zespół ulepszył sposób, w jaki model uczy się rysować ramki wokół zagrożeń, stosując regułę treningową lepiej równoważącą pozycję, rozmiar i kształt ramek, dzięki czemu detekcje lepiej pokrywają się z rzeczywistymi obszarami ognia i dymu.
Testowanie nowego systemu wizyjnego
Aby sprawdzić, czy te zmiany mają znaczenie w praktyce, autorzy porównali YOLO11 BSCS z dobrze znanymi modelami detekcji, w tym kilkoma wersjami YOLO i powszechnie używanym Faster R-CNN. Wszystkie systemy były trenowane i testowane na tych samych zbiorach obrazów pożarowych z wnętrz, a każdy eksperyment powtarzano wielokrotnie z różnymi losowymi startami, by zapewnić stabilność wyników. Ulepszony model osiąga wyższą precyzję, co oznacza mniej fałszywych alarmów, oraz wyższą czułość (recall), czyli mniej przeoczonych zagrożeń. Jego ogólny wynik, który równoważy oba te aspekty, wzrósł o kilka punktów procentowych ponad oryginalne YOLO11s, nawet przy użyciu mniejszej liczby parametrów niż wiele konkurencyjnych modeli. Dodatkowe testy na nowych obrazach z wcześniej nieznanych pomieszczeń pokazują, że system nadal wiarygodnie wykrywa płomienie i dym, co wskazuje dobrą generalizację poza danymi treningowymi.

Co to oznacza dla bezpieczniejszej opieki domowej
Mówiąc prosto, badanie pokazuje, że starannie dostrojony system wizyjny może pomóc robotom opiekuńczym wewnątrz budynków zauważać pożar i dym wcześniej i bardziej niezawodnie, bez potrzeby stosowania ciężkiego sprzętu komputerowego. YOLO11 BSCS pozwala robotowi szybko skanować pomieszczenia, wykrywać małe lub częściowo ukryte płomienie i dym oraz wspierać terminowe alarmy lub wskazówki dla mieszkańców, którzy mogą mieć trudności z samodzielną ewakuacją. Choć konieczne są dalsze badania, by przetestować system na rzeczywistych urządzeniach i rozszerzyć go na inne zagrożenia, praca ta wskazuje drogę ku przyszłości, w której mobilni opiekunowie dyskretnie patrolują nasze domy, dodając kolejny poziom bezpieczeństwa dla najbardziej narażonych członków społeczeństwa.
Cytowanie: Wang, Y., Wang, Y., Wei, Z. et al. YOLO11-BSCS: an enhanced attention-optimized framework for real-time indoor flame and smoke detection in elderly care mobile robots. Sci Rep 16, 14956 (2026). https://doi.org/10.1038/s41598-026-45957-5
Słowa kluczowe: wykrywanie pożaru w pomieszczeniach, roboty opiekuńcze dla seniorów, rozpoznawanie dymu, widzenie z użyciem głębokiego uczenia, monitorowanie bezpieczeństwa w czasie rzeczywistym