Clear Sky Science · pt
Detecção rápida de colisões sem sensores para controladores PMSM com recursos limitados usando um método baseado em FFRLS
Por que a detecção de impactos em motores é importante
De robôs de fábrica a carros elétricos, máquinas modernas dependem de motores elétricos compactos que giram em alta velocidade e operam próxima a pessoas. Se um braço em movimento ou uma esteira bater inesperadamente em algo — ou em alguém — o sistema precisa perceber o impacto quase que instantaneamente e reagir. Muitos sistemas de segurança usam sensores adicionais para detectar essas colisões, mas isso aumenta custo e complexidade. Este artigo apresenta uma forma de um tipo popular de motor sentir colisões usando apenas os sinais que ele já mede, possibilitando reações de segurança rápidas mesmo em hardware de baixo custo.
Motores que podem sentir sem sensores extras
O estudo concentra-se em motores síncronos com ímã permanente, uma classe amplamente utilizada de motores leves e de alto torque encontrados em robôs colaborativos, acionamentos industriais e veículos elétricos. Esses motores costumam ser controlados por eletrônica embarcada compacta com poder de processamento limitado. Esquemas existentes de detecção de colisões frequentemente dependem de modelos detalhados do robô, observadores complexos ou até redes neurais, que podem ser pesados demais para esses controladores. Outras abordagens monitoram diretamente a corrente do motor, mas ruído e variações normais de operação as tornam pouco confiáveis. Os autores objetivam criar um método simples o suficiente para pequenos controladores e preciso o bastante para distinguir colisões reais de perturbações cotidianas.
Transformando o comportamento do motor em uma sensação virtual de toque
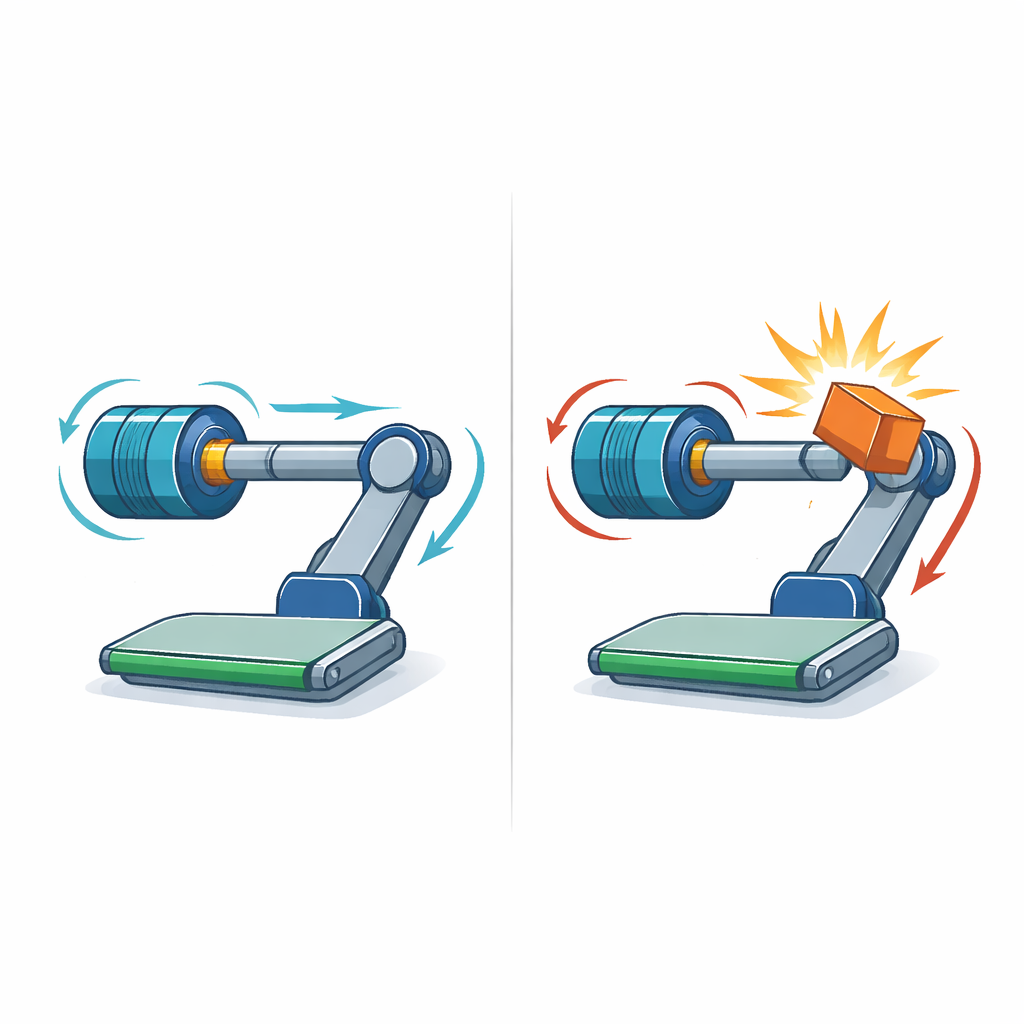
Em vez de adicionar hardware, o método “ouve” como a velocidade e a corrente do motor variam ao longo do tempo. Usando um modelo mecânico simplificado do motor, o controlador consegue inferir a força de torção invisível no eixo — chamada torque de carga — a partir de medidas básicas que já possui. A ferramenta central é uma técnica matemática conhecida como estimador recursivo de mínimos quadrados com fator de esquecimento (FFRLS). Na prática, esse estimador ajusta continuamente um pequeno conjunto de parâmetros internos para que a velocidade prevista pelo modelo acompanhe de perto a velocidade real. A partir desses parâmetros, o controlador reconstrói o torque variável no eixo, que inclui tanto a carga regular quanto qualquer força súbita extra causada por uma colisão.
Detectando solavancos repentinos em tempo real
Detectar uma colisão torna-se então um problema de reconhecimento de padrões nesse torque estimado. O algoritmo busca mudanças abruptas no sinal de torque estimado, mas precisa ignorar pequenas oscilações causadas por ruído ou variações normais de velocidade. Para isso, combina um filtro simples de suavização com uma diferença numérica que enfatiza saltos súbitos enquanto suprime flutuações aleatórias. O resultado é um “valor de avaliação” compacto que cresce acentuadamente quando o motor sofre um solavanco. O método também adapta seus limites de decisão à velocidade atual: em velocidades maiores, esperam-se variações naturais maiores, então os limiares se alargam automaticamente. Quando o valor de avaliação sai dessa faixa móvel de segurança, o algoritmo sinaliza uma colisão, tudo isso sem resolver grandes equações matriciais ou executar loops de otimização pesados.
Colocando o método à prova
A equipe construiu uma plataforma experimental em torno de um pequeno motor de ímã permanente, eletrônica de acionamento padrão e um freio magnético que aplica uma força de torção constante. Para simular colisões, pressionaram brevemente pastilhas de atrito contra o acoplamento do eixo, criando picos rápidos e imprevisíveis na carga. Os testes abrangeram três cenários realistas: velocidade constante, aceleração sob carga e velocidade constante com uma carga de fundo suavemente variável. Em todos os casos, o método detectou colisões em alguns milésimos de segundo, frequentemente em menos de um milissegundo, e respondeu de forma confiável mesmo quando o torque extra da “colisão” era muito menor que a carga existente. Experimentos adicionais em diferentes temperaturas do motor — próximo à temperatura ambiente e cerca de 80 graus Celsius — mostraram que o desempenho da detecção permaneceu robusto apesar das mudanças nas propriedades do motor causadas pelo aquecimento.
O que isso significa para máquinas mais seguras e mais baratas
Para não especialistas, o resultado chave é que um motor pode ganhar uma espécie de sentido de toque embutido sem adicionar novo hardware. Reutilizando os sinais de velocidade e corrente que o acionamento já mede, essa abordagem pode reconhecer impactos leves rapidamente o suficiente para disparar ações protetivas, como parar um braço robótico ou desacelerar uma esteira. Como o método se baseia em cálculos compactos e de baixo custo que cabem facilmente em controladores embarcados existentes, ele oferece uma rota prática para máquinas mais seguras e mais responsivas em fábricas, robôs de serviço e outras aplicações do dia a dia onde pessoas e motores potentes compartilham o mesmo espaço.
Citação: Zhao, D., Ren, T., Huang, G. et al. Fast sensorless collision detection for resource-constrained pmsm controllers using an FFRLS-based method. Sci Rep 16, 12667 (2026). https://doi.org/10.1038/s41598-026-43846-5
Palavras-chave: detecção de colisão, motores elétricos, segurança robótica, controle embarcado, monitoramento sem sensores