Clear Sky Science · ja
FFRLSベース手法を用いた資源制約のあるPMSMコントローラ向け高速センサレス衝突検出
モーターの接触検知が重要な理由
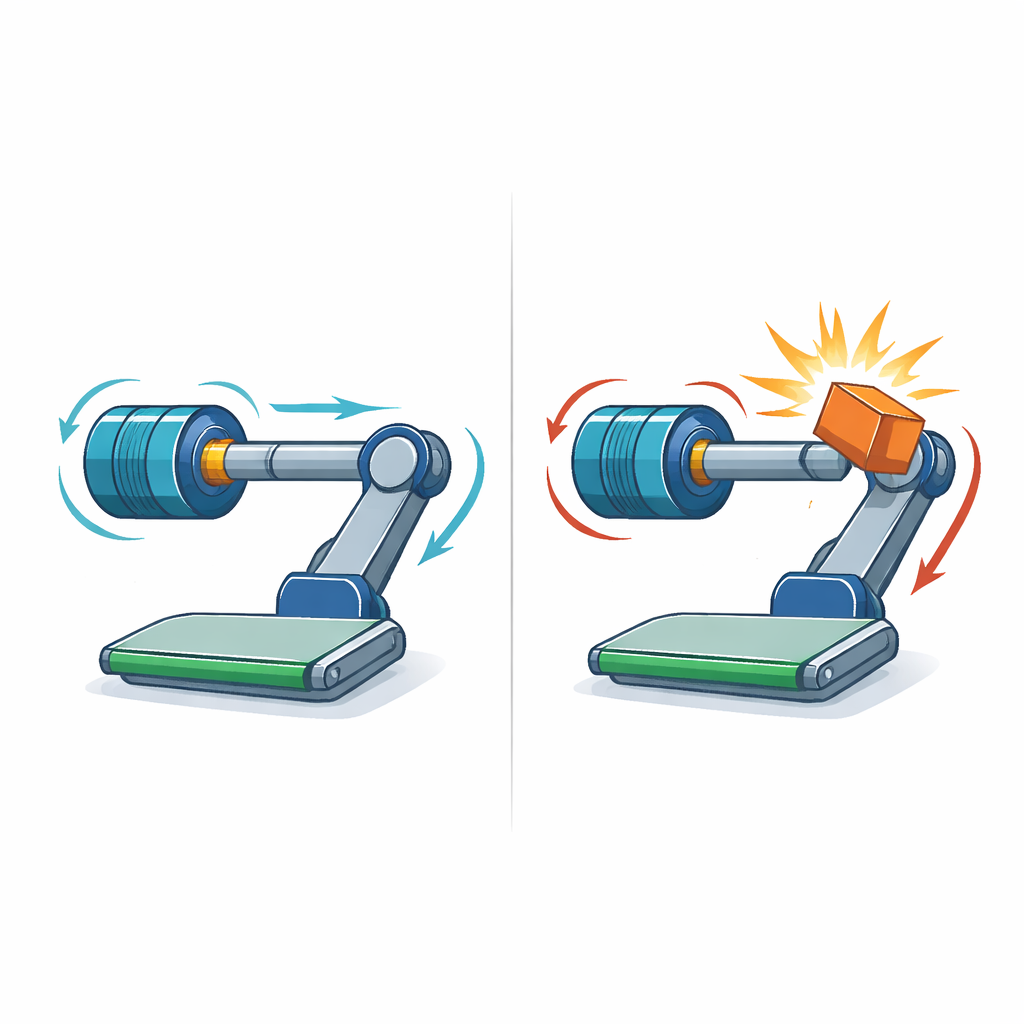
工場のロボットから電気自動車まで、現代の機械は小型で高速に回転し、人と近接して動作する電動モーターに依存しています。可動アームやコンベヤーが予期せず物や人にぶつかった場合、システムはほぼ瞬時に衝撃を検知して反応する必要があります。多くの安全システムは外付けのセンサーを用いて衝突を感知しますが、これにはコストや複雑さが加わります。本論文は、ある種の一般的なモーターが既に測定している信号だけで衝突を検知できる手法を示しており、低コストなハードウェアでも高速な安全反応を可能にします。
追加センサーなしで“触れる”モーター
本研究は、協働ロボット、産業用ドライブ、電気自動車で広く使われる高トルクで軽量な永久磁石同期モーター(PMSM)に焦点を当てています。これらのモーターは通常、計算資源の限られた小型組み込みコントローラで駆動されます。既存の衝突検出法は詳細なロボットモデルや複雑なオブザーバ、あるいはニューラルネットワークに依存することが多く、そのようなコントローラには負担が大きすぎます。別の手法ではモーター電流を直接監視しますが、ノイズや通常の運転変動により信頼性が低くなりがちです。著者らは、小型コントローラに適するほど単純で、日常的な撹乱と実際の衝突を区別できるほど精度の高い手法を目指しています。
モーター挙動を仮想的な触覚に変える
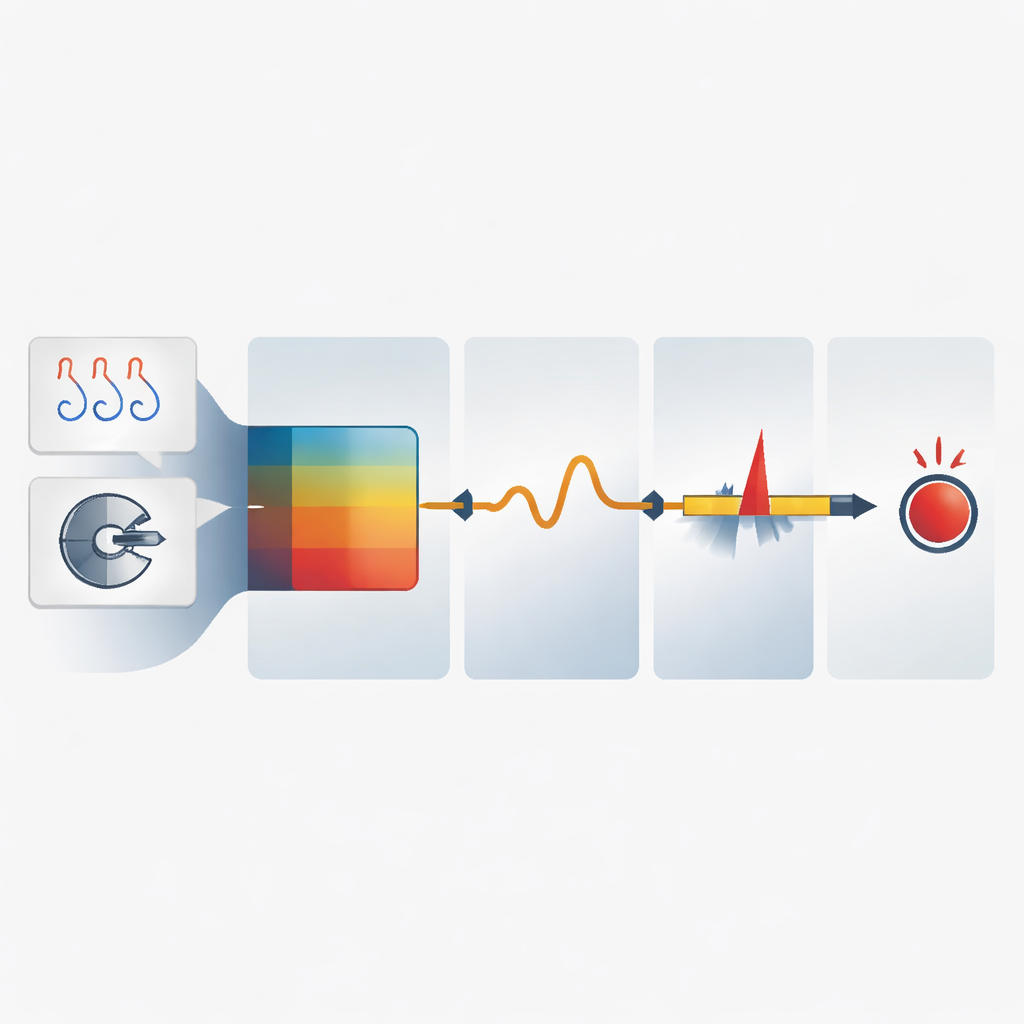
ハードウェアを追加する代わりに、この手法はモーターの速度と電流の時間変化に“耳を傾ける”ものです。単純化した機械モデルを使うことで、コントローラは測定済みの基本信号から軸にかかる見えないねじり力、すなわち負荷トルクを推定できます。中核となる道具は「忘却因子付き逐次最小二乗推定器(FFRLS)」と呼ばれる数学的手法です。実務的には、この推定器がモデルの予測速度が実際の速度に近づくように小さな内部パラメータ群を継続的に調整します。これらのパラメータから、コントローラは軸にかかる変動するトルクを再構成でき、そこには通常の負荷に加えて衝突による突然の余分な力も含まれます。
瞬時の衝撃をリアルタイムで見分ける
衝突の検出は、この推定トルク上でのパターン認識問題になります。アルゴリズムは推定トルク信号の急激な変化を探しますが、ノイズや通常の速度変動による小さな揺らぎは無視しなければなりません。そのために、単純な平滑フィルタと、急激なジャンプを強調しランダムな変動を抑える数値差分を組み合わせます。結果として得られるのは、モーターが衝撃を受けると急激に増加するコンパクトな「評価値」です。手法はまた判断閾値を現在の回転速度に応じて適応させます:高速ではより大きな自然変動が予想されるため閾値は自動的に広がります。評価値がこの可動的な安全帯を外れるとアルゴリズムは衝突を検知しますが、その過程で大きな行列方程式を解いたり重い最適化ループを回したりする必要はありません。
手法の実証
研究チームは小型の永久磁石モーター、標準的な駆動回路、一定のねじり力をかける磁気ブレーキを用いて実験プラットフォームを構築しました。衝突を模擬するため、軸カップリングに摩擦パッドを短時間押し当て、負荷に素早く予測不能なスパイクを与えました。試験は等速、負荷下での加速、緩やかに変動する背景負荷下での等速の3つの現実的シナリオを含みます。いずれの場合も、本手法は数ミリ秒以下、しばしば1ミリ秒未満で衝突を検出し、衝突による余分なトルクが既存負荷よりかなり小さい場合でも確実に応答しました。室温付近と約80℃の異なるモーター温度での追試験でも、加熱によるモーター特性の変化にかかわらず検出性能が堅牢に保たれることが示されました。
より安全で安価な機械への示唆
専門外の読者にとっての重要な結論は、モーターが新たなハードウェアを追加することなく一種の内蔵触覚を獲得できる点です。ドライブが既に計測している速度と電流の信号を再利用することで、このアプローチは軽い衝撃を迅速に認識し、ロボットアームの停止やコンベヤーの減速などの保護動作を引き起こすのに十分な速さで動作します。手法が小規模で低コストの計算に依存し、既存の組み込みコントローラに容易に収まるため、工場やサービスロボット、人と強力なモーターが同じ空間を共有する日常的な応用において、より安全で応答性の高い機械を実現する実用的な道を提供します。
引用: Zhao, D., Ren, T., Huang, G. et al. Fast sensorless collision detection for resource-constrained pmsm controllers using an FFRLS-based method. Sci Rep 16, 12667 (2026). https://doi.org/10.1038/s41598-026-43846-5
キーワード: 衝突検出, 電動モーター, ロボット安全, 組み込み制御, センサレス監視