Clear Sky Science · ar
كشف التصادم السريع بدون مستشعر لوحدات تحكم PMSM محدودة الموارد باستخدام طريقة مبنية على FFRLS
لماذا يهم اكتشاف الصدمات في المحركات
من روبوتات المصانع إلى السيارات الكهربائية، تعتمد الآلات الحديثة على محركات كهربائية مدمجة تدور بسرعة وتعمل بالقرب من الأشخاص. إذا اصطدمت ذراع متحركة أو ناقل شيئًا — أو شخصًا — بشكل مفاجئ، يجب على النظام أن يلاحظ التأثير على الفور تقريبًا ويتصرف. تستخدم العديد من أنظمة السلامة مستشعرات إضافية للكشف عن هذه الصدمات، لكن ذلك يضيف تكلفة وتعقيدًا. تعرض هذه الورقة طريقة ليمكّن نوع شائع من المحركات من استشعار التصادمات باستخدام الإشارات التي يقيسها بالفعل، مما يجعل ردود الأمان السريعة ممكنة حتى في الأجهزة منخفضة التكلفة.
محركات تشعر بدون مستشعرات إضافية
تركز الدراسة على المحركات المتزامنة ذات المغناطيس الدائم، فئة واسعة الاستخدام من المحركات الخفيفة وذات عزم الدوران العالي الموجودة في الروبوتات التعاونية، والمحركات الصناعية، والمركبات الكهربائية. عادةً ما تُقاد هذه المحركات بواسطة وحدات تحكم مضمنة مدمجة ذات قدرة حوسبة محدودة. تعتمد مخططات كشف التصادم الحالية غالبًا على نماذج روبوت مفصلة أو مراقبين معقدين أو حتى شبكات عصبية، والتي قد تكون ثقيلة جدًا على هذه الوحدات. تراقب أساليب أخرى تيار المحرك مباشرة، لكن الضوضاء والتغيرات التشغيلية العادية تجعلها غير موثوقة. يهدف المؤلفون إلى إنشاء طريقة بسيطة بما يكفي لوحدات التحكم الصغيرة ومتينة بما يكفي لتمييز التصادمات الحقيقية عن الاضطرابات اليومية.
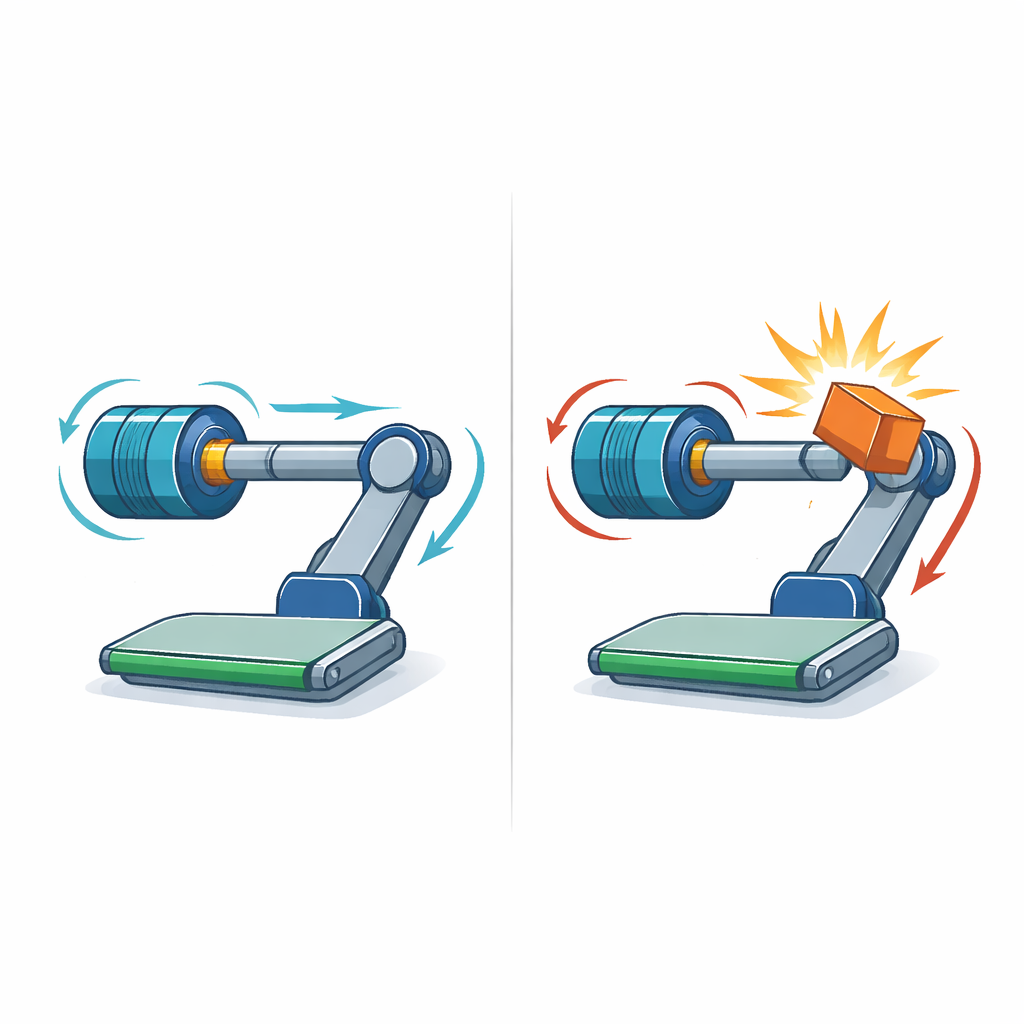
تحويل سلوك المحرك إلى حس افتراضي للمس
بدلاً من إضافة أجهزة، تقوم الطريقة «بالاستماع» إلى كيفية تغير سرعة المحرك وتياره مع الزمن. باستخدام نموذج ميكانيكي مبسّط للمحرك، يمكن لوحدة التحكم استنتاج العزم المؤثر على العمود — المسمى عزم الحمل — من قياسات أساسية تمتلكها بالفعل. الأداة الأساسية هي تقنية رياضية تُعرف بمقدر المربعات الصغرى العودية بعامل النسيان. عمليًا، يقوم هذا المقدر بضبط مجموعة صغيرة من المعاملات الداخلية بشكل مستمر بحيث يتطابق سرعة النموذج المتوقعة مع السرعة الفعلية قدر الإمكان. من هذه المعاملات، تعيد وحدة التحكم بناء العزم المتغير على العمود، الذي يشمل كلًا من الحمل المنتظم وأي قوة مفاجئة إضافية ناجمة عن تصادم.
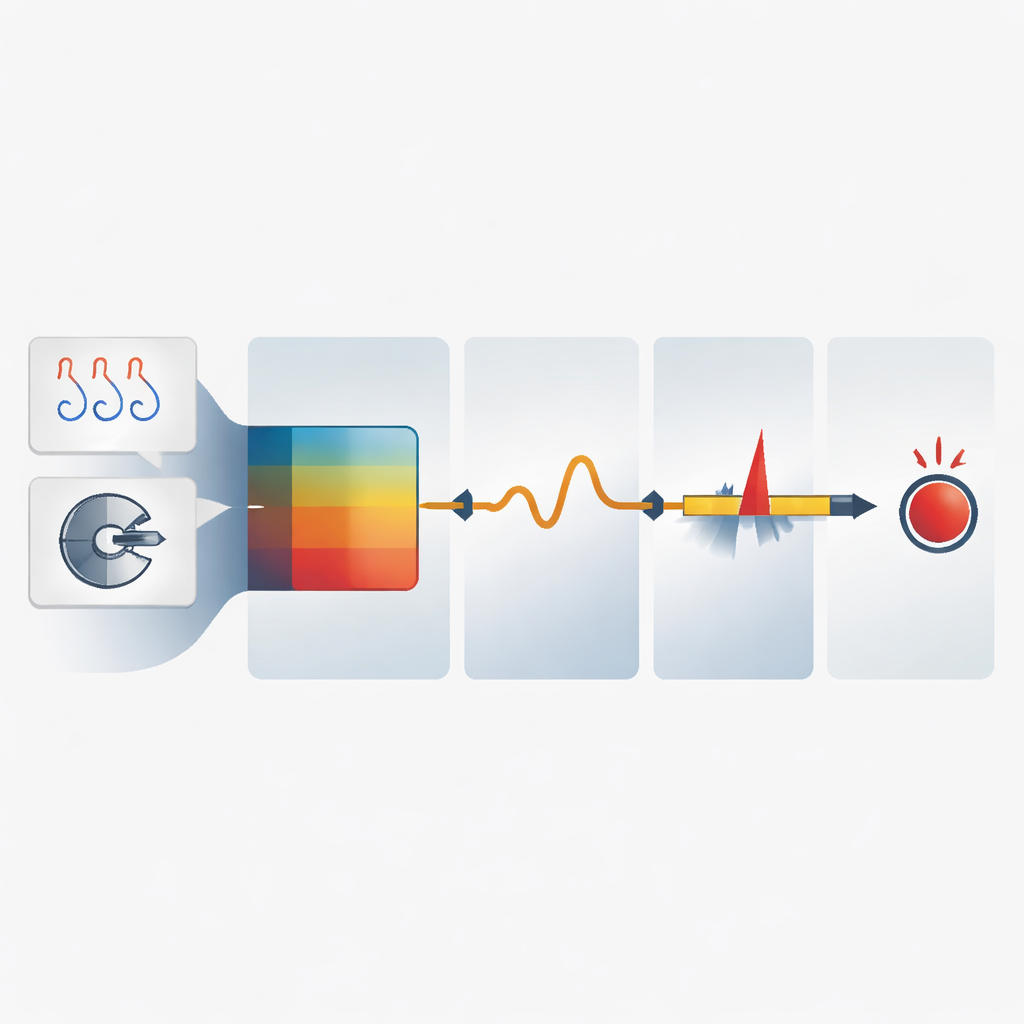
كشف الهزات المفاجئة في الوقت الحقيقي
يصبح اكتشاف التصادم مسألة تعرف نمط على هذا العزم المقدر. تبحث الخوارزمية عن تغيرات حادة في إشارة العزم المقدرة، لكنها يجب أن تتجاهل التموجات الصغيرة الناجمة عن الضوضاء أو التغيرات الطبيعية في السرعة. لتحقيق ذلك، تجمع بين مرشح تنعيم بسيط وفارق عددي يبرز القفزات المفاجئة بينما يكبت التقلبات العشوائية. النتيجة هي «قيمة تقييم» مدمجة تنمو بسرعة عندما يتعرض المحرك لصدمة. كما تتكيف الطريقة مع حدود القرار وفقًا للسرعة الحالية: عند السرعات الأعلى، يُتوقع تباين طبيعي أكبر، لذا تتسع الحدود تلقائيًا. عندما تخرج قيمة التقييم من هذه الحزمة الآمنة المتحركة، تشير الخوارزمية إلى وقوع تصادم، وكل ذلك من دون حل معادلات مصفوفية كبيرة أو تشغيل حلقات تحسين مكثفة.
تجربة الطريقة عمليًا
بنى الفريق منصة تجريبية حول محرك صغير ذو مغناطيس دائم، وإلكترونيات قيادة قياسية، وفرامل مغناطيسية تطبق عزمًا التوائيًا ثابتًا. لمحاكاة التصادمات، ضغطوا لفترات قصيرة على فواصل احتكاك عند تروس العمود، محدثين نبضات سريعة وغير متوقعة في الحمل. شملت الاختبارات ثلاث سيناريوهات واقعية: سرعة ثابتة، التسارع تحت حمل، وسرعة ثابتة مع حمل خلفي متغير بلطف. في كل حالة، اكتشفت الطريقة التصادمات خلال أجزاء من الآلاف من الثانية، غالبًا في أقل من مللي ثانية واحدة، واستجابت بشكل موثوق حتى عندما كان عزم «التصادم» الإضافي أصغر بكثير من الحمل القائم. أظهرت تجارب متابعة عند درجات حرارة مختلفة للمحرك — حول درجة حرارة الغرفة وحوالي 80 درجة مئوية — أن أداء الكشف ظل قويًا على الرغم من التغيرات في خصائص المحرك الناتجة عن التسخين.
ما يعنيه هذا لآلات أكثر أمانًا وأرخص
بالنسبة للغير متخصصين، النتيجة الأساسية هي أن المحرك يمكن أن يكتسب نوعًا من حاسة اللمس المدمجة دون إضافة أجهزة جديدة. من خلال إعادة استخدام إشارات السرعة والتيار التي يقيسها المحرك بالفعل، يمكن لهذا النهج التعرف على الصدمات الخفيفة بسرعة كافية لتحفيز إجراءات وقائية، مثل إيقاف ذراع روبوت أو إبطاء ناقل. وبما أن الطريقة تعتمد على حسابات مدمجة ومنخفضة التكلفة تتناسب بسهولة مع وحدات التحكم المضمنة الحالية، فإنها تقدم مسارًا عمليًا نحو آلات أكثر أمانًا وأكثر استجابة في المصانع، والروبوتات الخدمية، وتطبيقات أخرى يومية حيث يتشارك الناس والمحركات القوية نفس المساحة.
الاستشهاد: Zhao, D., Ren, T., Huang, G. et al. Fast sensorless collision detection for resource-constrained pmsm controllers using an FFRLS-based method. Sci Rep 16, 12667 (2026). https://doi.org/10.1038/s41598-026-43846-5
الكلمات المفتاحية: كشف التصادم, المحركات الكهربائية, سلامة الروبوت, التحكم المضمن, المراقبة بدون مستشعر