Clear Sky Science · en
Fast sensorless collision detection for resource-constrained pmsm controllers using an FFRLS-based method
Why bump detection in motors matters
From factory robots to electric cars, modern machines rely on compact electric motors that spin fast and work close to people. If a moving arm or conveyor belt unexpectedly hits something—or someone—the system must notice the impact almost instantly and react. Many safety systems use extra sensors to feel these bumps, but that adds cost and complexity. This paper introduces a way for a popular type of motor to sense collisions using only the signals it already measures, making fast safety reactions possible even in low-cost hardware.
Motors that can feel without extra sensors
The study focuses on permanent-magnet synchronous motors, a widely used class of high-torque, lightweight motors found in collaborative robots, industrial drives, and electric vehicles. These motors are usually driven by compact embedded controllers with limited computing power. Existing collision-detection schemes often rely on detailed robot models, complex observers, or even neural networks, which can be too heavy for such controllers. Other approaches watch the motor current directly, but noise and normal operating variations make them unreliable. The authors aim to create a method that is both simple enough for small controllers and precise enough to distinguish true collisions from everyday disturbances.
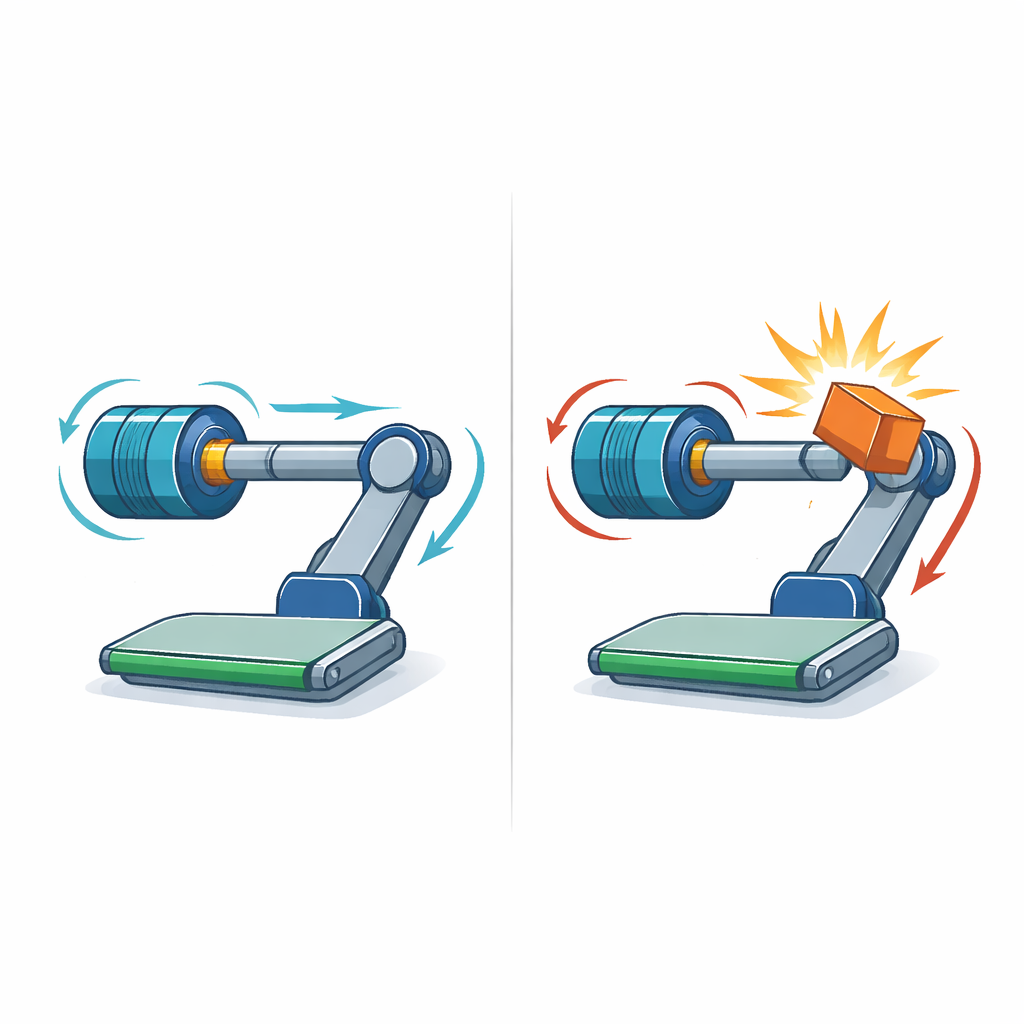
Turning motor behavior into a virtual sense of touch
Instead of adding hardware, the method “listens” to how the motor’s speed and current change over time. Using a simplified mechanical model of the motor, the controller can infer the invisible twisting force at the shaft—called load torque—from basic measurements it already has. The core tool is a mathematical technique known as a forgetting-factor recursive least-squares estimator. In practical terms, this estimator continuously adjusts a tiny set of internal parameters so that the model’s predicted speed closely matches the actual speed. From these parameters, the controller reconstructs the changing torque on the shaft, which includes both the regular load and any sudden extra force caused by a collision.
Spotting sudden jolts in real time
Detecting a collision then becomes a pattern-recognition problem on this estimated torque. The algorithm looks for abrupt changes in the estimated torque signal, but it must ignore small ripples caused by noise or normal speed changes. To do this, it combines a simple smoothing filter with a numerical difference that emphasizes sudden jumps while suppressing random fluctuations. The result is a compact “evaluation value” that grows sharply when the motor experiences a jolt. The method also adapts its decision limits to the current speed: at higher speeds, larger natural variations are expected, so the thresholds automatically widen. When the evaluation value leaves this moving safe band, the algorithm flags a collision, all without solving big matrix equations or running heavy optimization loops.
Putting the method to the test
The team built an experimental platform around a small permanent-magnet motor, standard drive electronics, and a magnetic brake that applies a steady twisting force. To mimic collisions, they briefly pressed friction pads against the shaft coupling, creating quick, unpredictable spikes in load. Tests covered three realistic scenarios: constant speed, speeding up under load, and constant speed with a gently varying background load. In every case, the method detected collisions within a few thousandths of a second, often in less than one millisecond, and responded reliably even when the extra torque from the “collision” was much smaller than the existing load. Follow-up experiments at different motor temperatures—around room temperature and about 80 degrees Celsius—showed that the detection performance remained robust despite changes in motor properties caused by heating.
What this means for safer, cheaper machines
For non-specialists, the key outcome is that a motor can gain a kind of built-in sense of touch without adding new hardware. By reusing the speed and current signals the drive already measures, this approach can recognize light impacts quickly enough to trigger protective actions, such as stopping a robotic arm or slowing a conveyor. Because the method relies on compact, low-cost computations that fit easily into existing embedded controllers, it offers a practical route to safer, more responsive machines in factories, service robots, and other everyday applications where people and powerful motors share the same space.
Citation: Zhao, D., Ren, T., Huang, G. et al. Fast sensorless collision detection for resource-constrained pmsm controllers using an FFRLS-based method. Sci Rep 16, 12667 (2026). https://doi.org/10.1038/s41598-026-43846-5
Keywords: collision detection, electric motors, robot safety, embedded control, sensorless monitoring