Clear Sky Science · pl
Szybkie bezczujnikowe wykrywanie kolizji dla sterowników PMSM o ograniczonych zasobach przy użyciu metody opartej na FFRLS
Dlaczego wykrywanie uderzeń w silnikach ma znaczenie
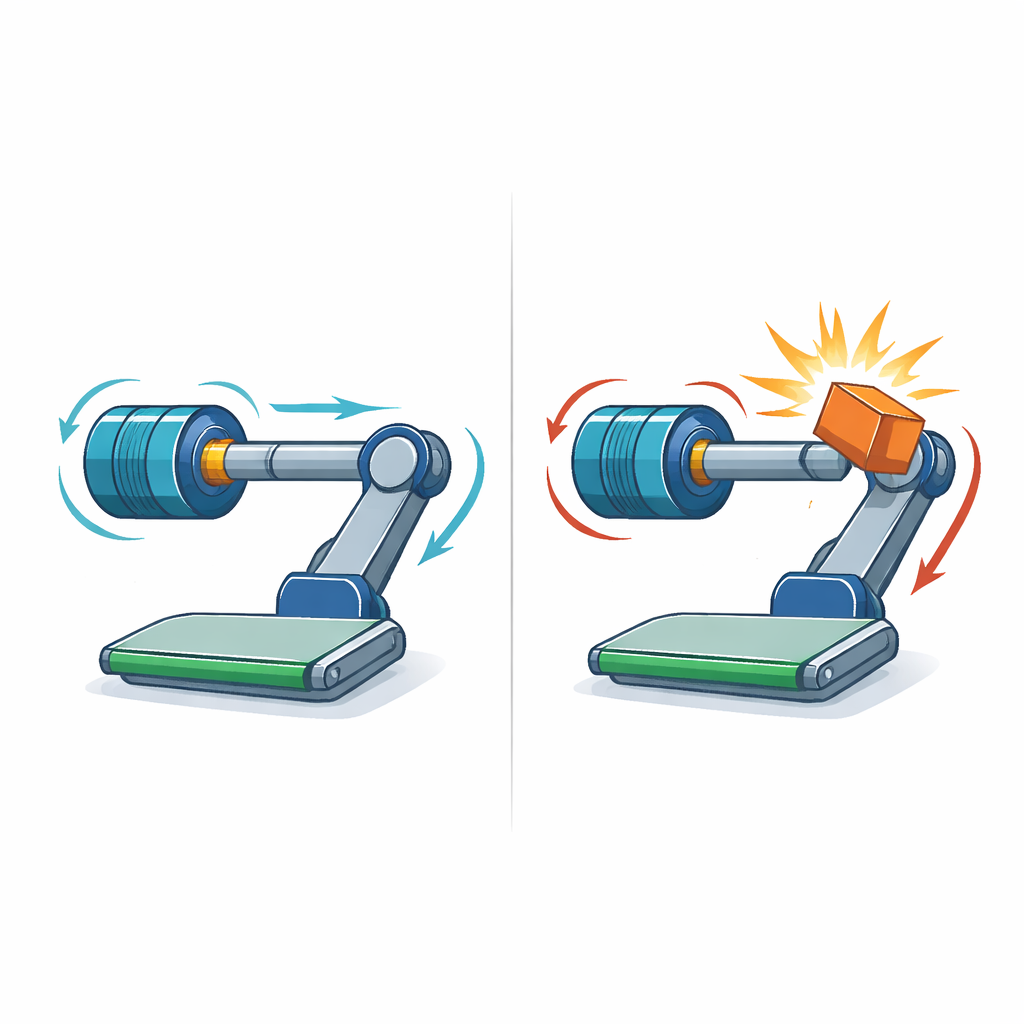
Od robotów fabrycznych po samochody elektryczne — współczesne maszyny opierają się na kompaktowych silnikach elektrycznych, które wirują szybko i pracują blisko ludzi. Jeśli ruchome ramię lub taśma przenośnika niespodziewanie uderzy w coś — albo w kogoś — system musi niemal natychmiast wykryć uderzenie i zareagować. Wiele systemów bezpieczeństwa wykorzystuje dodatkowe czujniki do wykrywania takich zdarzeń, co jednak zwiększa koszty i złożoność. W artykule przedstawiono sposób, w jaki popularny typ silnika może wykrywać kolizje, używając jedynie sygnałów, które już mierzy, co pozwala na szybkie reakcje bezpieczeństwa nawet w tanim sprzęcie.
Silniki, które „czują” bez dodatkowych czujników
Badanie koncentruje się na silnikach synchronicznych z magnesami trwałymi, szeroko stosowanej klasie lekkich silników o dużym momencie obrotowym, spotykanych w robotach współpracujących, napędach przemysłowych i pojazdach elektrycznych. Silniki te zwykle sterowane są przez kompaktowe układy wbudowane o ograniczonej mocy obliczeniowej. Istniejące schematy wykrywania kolizji często opierają się na szczegółowych modelach robotów, złożonych obserwatorach lub nawet sieciach neuronowych, które mogą być zbyt ciężkie dla takich sterowników. Inne podejścia monitorują bezpośrednio prąd silnika, ale szumy i normalne zmiany pracy sprawiają, że są zawodne. Autorzy dążą do stworzenia metody na tyle prostej, by działała na małych sterownikach, i na tyle precyzyjnej, by odróżniać rzeczywiste kolizje od codziennych zakłóceń.
Przekształcanie zachowania silnika w wirtualne poczucie dotyku
Zamiast dodawać sprzęt, metoda „nasłuchuje”, jak prędkość i prąd silnika zmieniają się w czasie. Wykorzystując uproszczony model mechaniczny silnika, sterownik może wywnioskować niewidzialny moment skręcający na wale — zwany momentem obciążenia — na podstawie podstawowych pomiarów, które już posiada. Kluczowym narzędziem jest matematyczna technika znana jako rekurencyjna metoda najmniejszych kwadratów z czynnikiem zapominania (FFRLS). W praktyce estimator ten ciągłe dopasowuje niewielki zestaw parametrów wewnętrznych, tak aby przewidywana przez model prędkość była zbliżona do rzeczywistej. Z tych parametrów sterownik rekonstruuje zmieniający się moment na wale, obejmujący zarówno zwykłe obciążenie, jak i nagłe dodatkowe siły spowodowane kolizją.
Wykrywanie nagłych wstrząsów w czasie rzeczywistym
Wykrywanie kolizji staje się wówczas problemem rozpoznawania wzorców w oszacowanym momencie. Algorytm szuka nagłych zmian w sygnale oszacowanego momentu, jednocześnie ignorując niewielkie wahania spowodowane szumem lub normalnymi zmianami prędkości. W tym celu łączy prosty filtr wygładzający z różnicą numeryczną, która podkreśla nagłe skoki przy tłumieniu losowych fluktuacji. Efektem jest zwarty „wartość oceny”, która gwałtownie rośnie przy wstrząsie silnika. Metoda dostosowuje też swoje granice decyzyjne do bieżącej prędkości: przy wyższych prędkościach oczekiwane są większe naturalne zmiany, więc progi automatycznie się rozszerzają. Gdy wartość oceny opuszcza ten ruchomy bezpieczny pas, algorytm zgłasza kolizję — wszystko to bez rozwiązywania dużych równań macierzowych czy uruchamiania ciężkich pętli optymalizacyjnych.
Testy metody
Zespół zbudował platformę eksperymentalną wokół małego silnika z magnesami trwałymi, standardowej elektroniki napędowej i hamulca magnetycznego, który stosował stały moment skręcający. Aby naśladować kolizje, krótkotrwale dociskano okładziny cierne do sprzęgła wału, tworząc szybkie, nieprzewidywalne piki w obciążeniu. Testy obejmowały trzy realistyczne scenariusze: stałą prędkość, przyspieszanie pod obciążeniem oraz stałą prędkość z łagodnie zmieniającym się obciążeniem w tle. W każdym przypadku metoda wykrywała kolizje w ciągu kilku tysięcznych sekundy, często w czasie krótszym niż jedna milisekunda, i działała niezawodnie nawet wtedy, gdy dodatkowy moment z „kolizji” był znacznie mniejszy niż istniejące obciążenie. Dalsze eksperymenty przy różnych temperaturach silnika — wokół temperatury pokojowej i około 80 stopni Celsjusza — wykazały, że wydajność wykrywania pozostawała odporna mimo zmian właściwości silnika spowodowanych nagrzewaniem.
Co to oznacza dla bezpieczniejszych, tańszych maszyn
Dla osób niezajmujących się specjalistycznie kluczowy wniosek jest taki, że silnik może zyskać swego rodzaju wbudowane poczucie dotyku bez dodawania nowego sprzętu. Wykorzystując ponownie sygnały prędkości i prądu, które napęd już mierzy, podejście to potrafi rozpoznać lekkie uderzenia wystarczająco szybko, by wywołać działania ochronne, takie jak zatrzymanie ramienia robota czy spowolnienie przenośnika. Ponieważ metoda opiera się na zwartych, tanich obliczeniach mieszczących się łatwo w istniejących sterownikach wbudowanych, oferuje praktyczną drogę do bezpieczniejszych, bardziej responsywnych maszyn w fabrykach, robotach usługowych i innych codziennych zastosowaniach, gdzie ludzie dzielą przestrzeń z potężnymi silnikami.
Cytowanie: Zhao, D., Ren, T., Huang, G. et al. Fast sensorless collision detection for resource-constrained pmsm controllers using an FFRLS-based method. Sci Rep 16, 12667 (2026). https://doi.org/10.1038/s41598-026-43846-5
Słowa kluczowe: wykrywanie kolizji, silniki elektryczne, bezpieczeństwo robotów, sterowanie wbudowane, monitorowanie bezczujnikowe