Clear Sky Science · it
Rilevamento rapido delle collisioni senza sensori per controller PMSM a risorse limitate usando un metodo basato su FFRLS
Perché la rilevazione degli urti nei motori è importante
Dai robot di fabbrica alle auto elettriche, le macchine moderne fanno affidamento su motori elettrici compatti che girano rapidamente e operano vicino alle persone. Se un braccio in movimento o un nastro trasportatore colpisce inaspettatamente qualcosa — o qualcuno — il sistema deve rilevare l’impatto quasi istantaneamente e reagire. Molti sistemi di sicurezza usano sensori aggiuntivi per percepire questi urti, ma ciò aumenta i costi e la complessità. Questo articolo presenta un modo per permettere a un tipo di motore molto diffuso di rilevare le collisioni usando solo i segnali che misura già, rendendo possibili reazioni di sicurezza rapide anche su hardware a basso costo.
Motori che percepiscono senza sensori extra
Lo studio si concentra sui motori sincroni a magneti permanenti, una classe molto diffusa di motori ad elevata coppia e peso ridotto, presenti nei robot collaborativi, negli azionamenti industriali e nei veicoli elettrici. Questi motori sono solitamente pilotati da controller embedded compatti con capacità di calcolo limitate. Gli attuali schemi di rilevamento delle collisioni spesso si basano su modelli dettagliati del robot, osservatori complessi o persino reti neurali, che possono essere troppo pesanti per tali controller. Altri approcci monitorano direttamente la corrente del motore, ma il rumore e le normali variazioni operative li rendono inaffidabili. Gli autori mirano a creare un metodo abbastanza semplice per i piccoli controller e sufficientemente preciso da distinguere vere collisioni dalle perturbazioni quotidiane.
Trasformare il comportamento del motore in un senso tattile virtuale
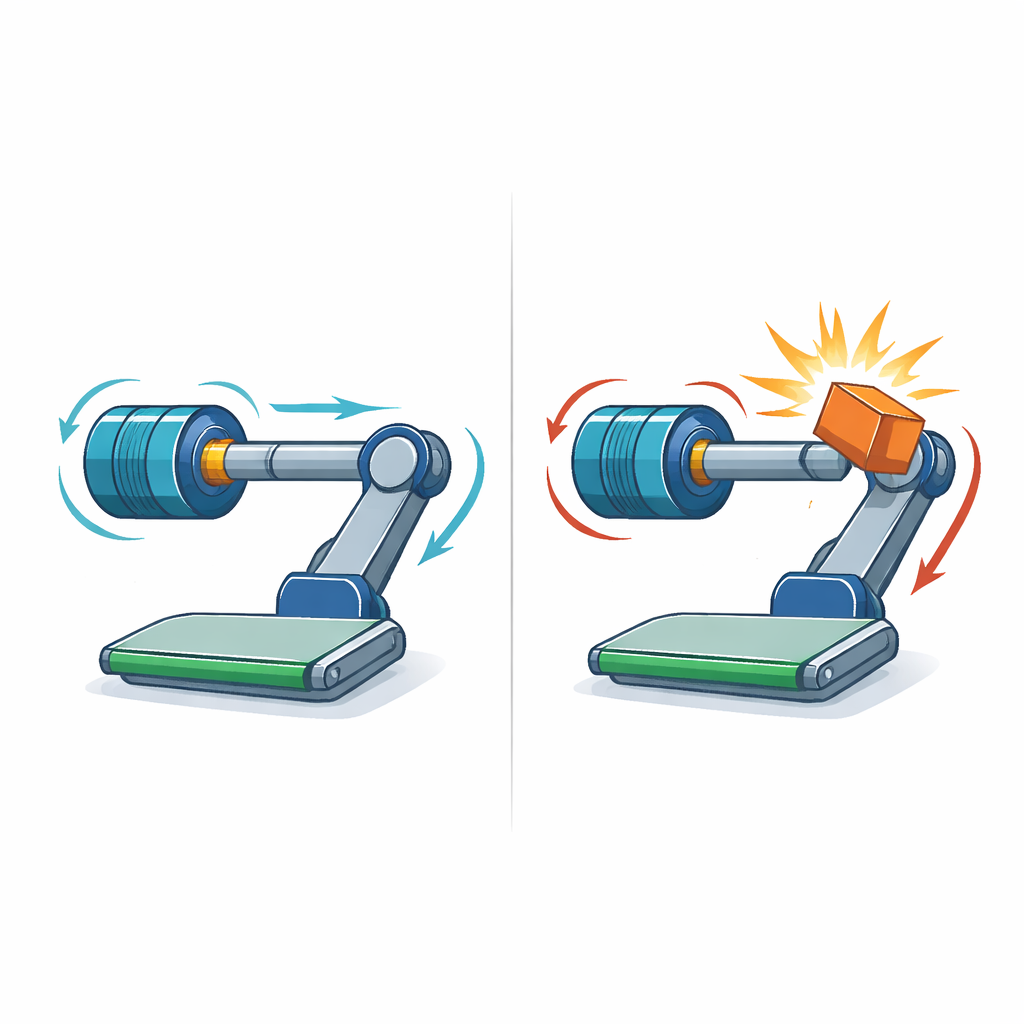
Invece di aggiungere hardware, il metodo “ascolta” come cambiano nel tempo velocità e corrente del motore. Usando un modello meccanico semplificato del motore, il controller può dedurre la forza di torsione invisibile all’albero — chiamata coppia di carico — a partire dalle misure di base che già possiede. Lo strumento centrale è una tecnica matematica nota come stimatore ricorsivo dei minimi quadrati con fattore di oblio (forgetting-factor recursive least-squares). In termini pratici, questo stimatore regola continuamente un piccolo insieme di parametri interni in modo che la velocità prevista dal modello corrisponda strettamente alla velocità reale. Da questi parametri il controller ricostruisce la coppia che agisce sull’albero, comprensiva sia del carico regolare sia di qualsiasi forza improvvisa causata da una collisione.
Individuare scossoni improvvisi in tempo reale
Rilevare una collisione diventa quindi un problema di riconoscimento di pattern sulla coppia stimata. L’algoritmo cerca cambiamenti bruschi nel segnale di coppia stimata, ma deve ignorare piccole ondulazioni causate dal rumore o dalle normali variazioni di velocità. Per farlo combina un semplice filtro di lisciamento con una differenza numerica che enfatizza i salti rapidi sopprimendo le fluttuazioni casuali. Il risultato è un “valore di valutazione” compatto che cresce bruscamente quando il motore subisce una scossa. Il metodo adatta inoltre i limiti decisionali alla velocità corrente: a velocità maggiori si prevedono variazioni naturali più ampie, quindi le soglie si ampliano automaticamente. Quando il valore di valutazione esce da questa banda di sicurezza mobile, l’algoritmo segnala una collisione, il tutto senza risolvere grandi equazioni matriciali o eseguire pesanti cicli di ottimizzazione.
Mettere il metodo alla prova
Il team ha costruito una piattaforma sperimentale attorno a un piccolo motore a magneti permanenti, elettronica di potenza standard e un freno magnetico che applica una coppia di torsione costante. Per simulare collisioni hanno premuto brevemente delle pastiglie di attrito contro l’accoppiamento dell’albero, creando picchi rapidi e imprevedibili nel carico. I test hanno coperto tre scenari realistici: velocità costante, accelerazione con carico e velocità costante con un carico di fondo che varia dolcemente. In ogni caso il metodo ha rilevato le collisioni entro pochi millesimi di secondo, spesso in meno di un millisecondo, e ha risposto in modo affidabile anche quando la coppia aggiuntiva dovuta alla “collisione” era molto più piccola del carico esistente. Esperimenti successivi a diverse temperature del motore — intorno alla temperatura ambiente e circa 80 gradi Celsius — hanno mostrato che le prestazioni di rilevamento restano robuste nonostante le variazioni delle proprietà del motore dovute al riscaldamento.
Cosa significa per macchine più sicure ed economiche
Per i non specialisti, il risultato chiave è che un motore può acquisire una sorta di senso del tatto incorporato senza aggiungere nuovo hardware. Riutilizzando i segnali di velocità e corrente che l’azionamento misura già, questo approccio può riconoscere impatti leggeri abbastanza velocemente da attivare azioni protettive, come fermare un braccio robotico o rallentare un nastro trasportatore. Poiché il metodo si basa su calcoli compatti e a basso costo che si adattano facilmente ai controller embedded esistenti, offre una strada pratica verso macchine più sicure e reattive nelle fabbriche, nei robot di servizio e in altre applicazioni quotidiane in cui persone e motori potenti condividono lo stesso spazio.
Citazione: Zhao, D., Ren, T., Huang, G. et al. Fast sensorless collision detection for resource-constrained pmsm controllers using an FFRLS-based method. Sci Rep 16, 12667 (2026). https://doi.org/10.1038/s41598-026-43846-5
Parole chiave: rilevamento collisioni, motori elettrici, sicurezza dei robot, controllo embedded, monitoraggio senza sensori