Clear Sky Science · ja
姿勢安定を保つ二足歩行者と四足歩行者の異なる戦略 — 静的ポストログラフィーによる健康な人間と犬の比較
じっと立つことが簡単でない理由
まっすぐ立っていることは楽に感じられますが、身体は絶えず微細な補正を行い転倒を防いでいます。本研究は一見楽しげな疑問を投げかけます:視覚が使えないとき、人と犬は同じような“コツ”でバランスを保つのでしょうか?健康な若年成人と家庭犬が静止立位をしている様子を比較することで、二本足と四本足で構成された体が異なる感覚や体型にどのように依存して体を安定させるかを明らかにします。
人と犬の検査方法
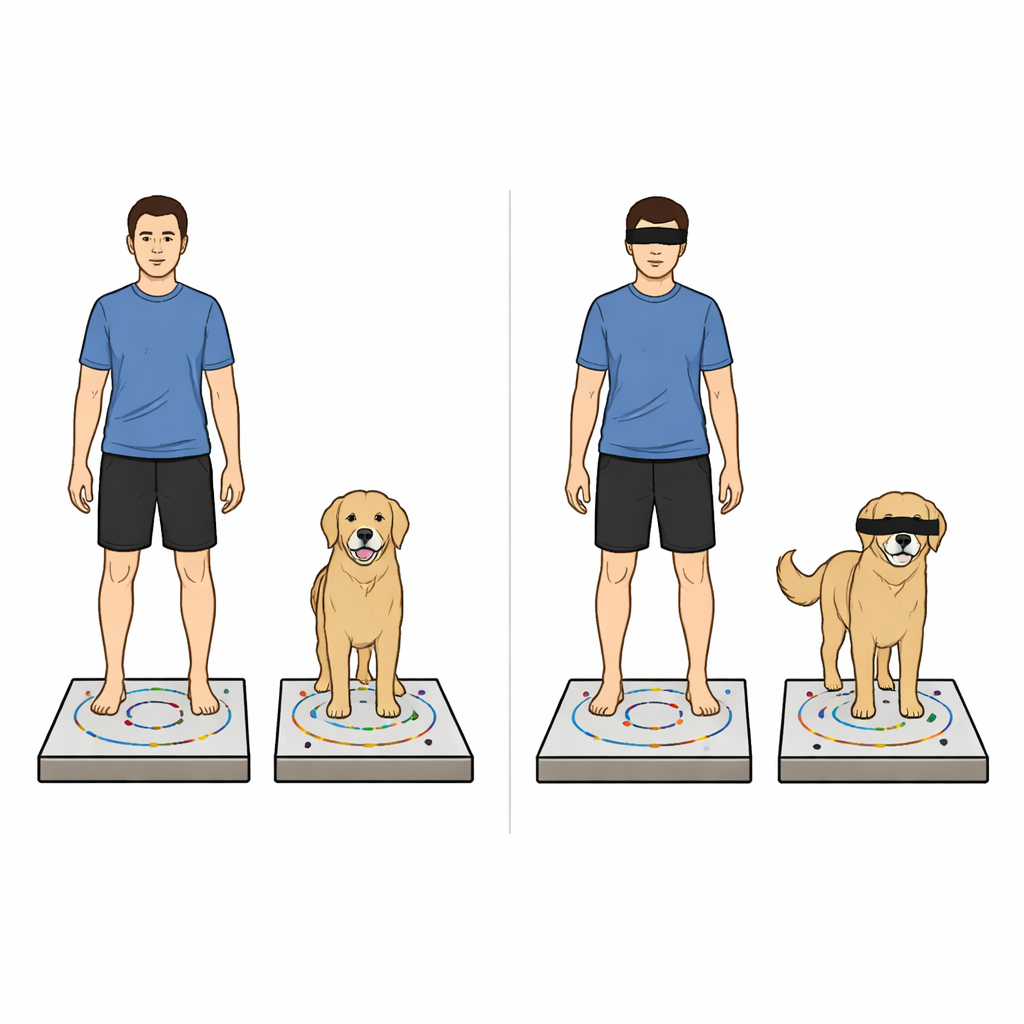
バランスを調べるため、研究チームは22人と22匹の犬に圧力検知プラットフォームの上で静かに立ってもらいました。この装置は足や爪下の荷重の移動を検出し、バランスの制御を反映する体下の移動点を追跡できます。各被験者は通常の視覚ありと視覚が有効でない状態の2回測定されました。人は目を閉じて固定された一点を見ないようにし、犬には視界を遮るように慎重にテープで留めた保護ゴーグルを装着しました。これらの測定から、視界ありとなしでどれだけ揺れが変わるかを比べる標準指標ロムベルグ指数を算出しました。
バランス指標の意味
より安定して立っているときは、体下の移動点の移動距離が短く、動きが遅く、覆う面積が小さくなります。ロムベルグ指数はこれらの特徴を取り、視覚を取り去ったときにどれだけ変化するかを表します。値がおよそ100なら目を閉じてもバランスにほとんど影響がないことを意味し、100を明確に上回るか下回る値は視覚の影響が大きいことを示します。研究チームは前後方向および左右方向の揺れの大きさ、揺れの経路長、移動速度、覆った面積などいくつかの指標を調べました。
人は犬より視覚を頼りにする
最も明確なパターンは、人は視覚が使えなくなると明らかに不安定になることでした。前後方向の揺れ、揺れ経路の長さ、移動速度では、人のスコアは100を上回り、視覚を除くと揺れが増えることを示しました。一方で犬では同じ指標がいずれも100を下回り、視覚がなくてもバランスの変化が小さいか、むしろやや安定することさえありました。端的に言えば、人は静止立位を保つために視覚に強く依存するのに対し、犬は筋肉や関節からの感覚や内耳からの信号など他の感覚により頼っているのです。
共通する点と異なるバランスの工夫
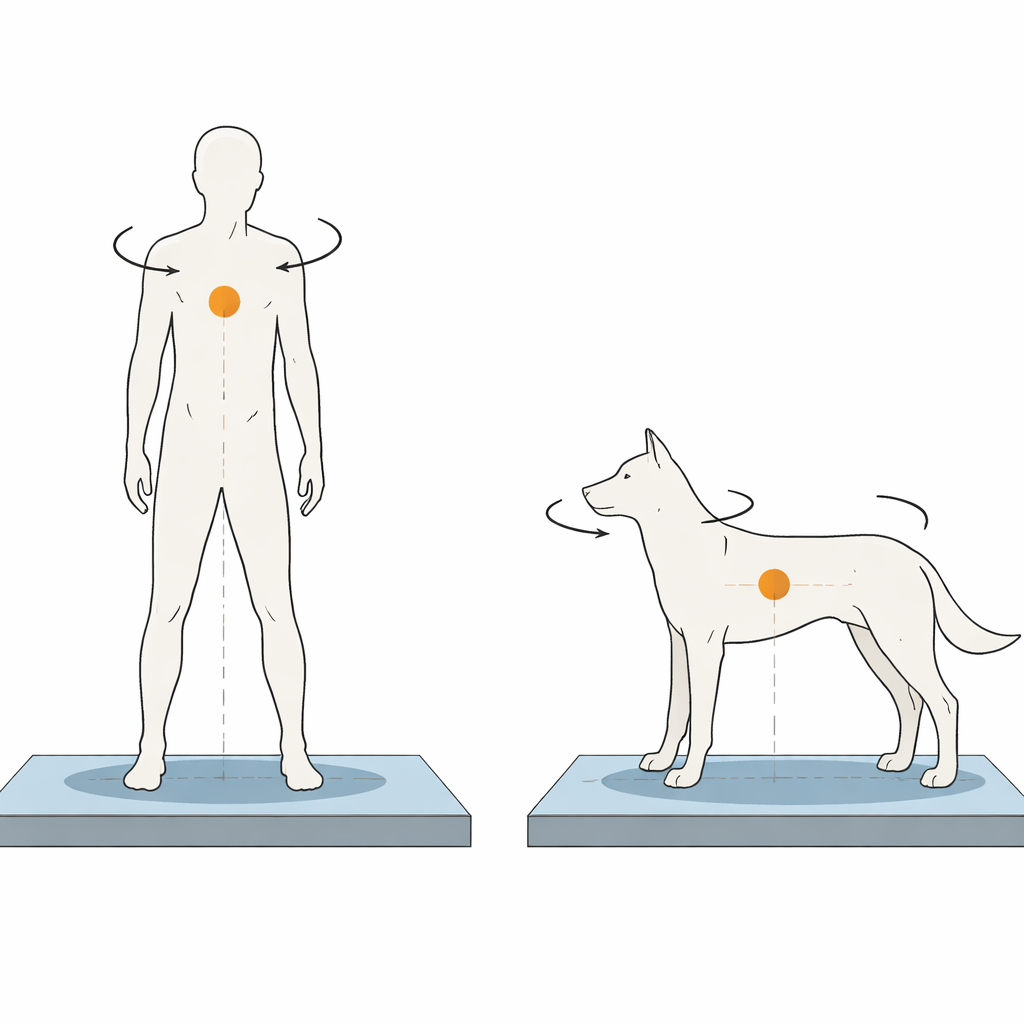
すべての指標が種間で異なっていたわけではありません。左右方向の揺れや支持面積の全体は、視覚が取り除かれたときに人と犬で類似していました。これは両種が視覚に頼れなくなった場合、体の構造は異なっても比較可能な代替戦略を用いる可能性を示唆します。著者らは体型を重要な要因として指摘します:犬は四本の脚と低い重心で長い長方形の支持基底を作り、前後方向の安定性が高い一方で左右にはやや脆弱になり得ます。二本足で小さな支持基底に立つ人間は前後方向の揺れが大きく、これを抑えるために視覚に強く依存します。
なぜ実験室外でも重要なのか
本研究は、解剖学と進化によって形作られた異なる戦略で人と犬がバランスを維持していると結論づけます。高い重心を持つ人間は視覚情報に強く依存するため、目隠しをすると揺れが大きくなります。低い重心と広い支持基底を持つ犬は視覚がなくても比較的適応しやすく、非視覚的感覚や四肢の協調により頼る傾向があります。これらの違いを理解することは、獣医が犬のバランス問題を評価する際や、訓練やリハビリを設計するセラピストにとって有用であり、異なる脚数で直立を維持する必要のある動物由来ロボットを設計する技術者にも示唆を与えます。
引用: Aghapour, M., Affenzeller, N., Lutonsky, C. et al. Different strategies of bipeds and quadrupeds to maintain postural stability- a comparison of healthy humans and dogs via static posturography. Sci Rep 16, 14408 (2026). https://doi.org/10.1038/s41598-026-42726-2
キーワード: 姿勢安定性, 人間と犬の比較, バランス制御, 静的ポストログラフィー, 圧中心(COP)