Clear Sky Science · zh
场景可变性影响行动决策、信心和行为动态
为什么繁忙的街道看起来难以判断
站在斑马线上,有些道路看起来容易判断,而另一些即便车流间隙在客观上同样安全,也会显得令人困惑。该研究探讨为什么更混乱的场景会让我们犹豫、降低过街的确定感,并在细微处改变我们的行为,即便实际安全通过的几率并未真正改变。
用于测试街道判断的虚拟城市
研究者构建了一个沉浸式虚拟现实街道,包含六车道交通和一条宽阔的斑马线。参与者佩戴头显,可以在大房间内自由行走,看到六辆车驶向过街点,双方各三辆。在不同的环节中,他们要么评价自己安全过街的确信程度,要么判断情形的风险,或者在认为安全时实际尝试过街。在数百次试验中,团队改变了车辆到达斑马线所需的时间,并且关键在于改变车辆速度的相似性或差异性。
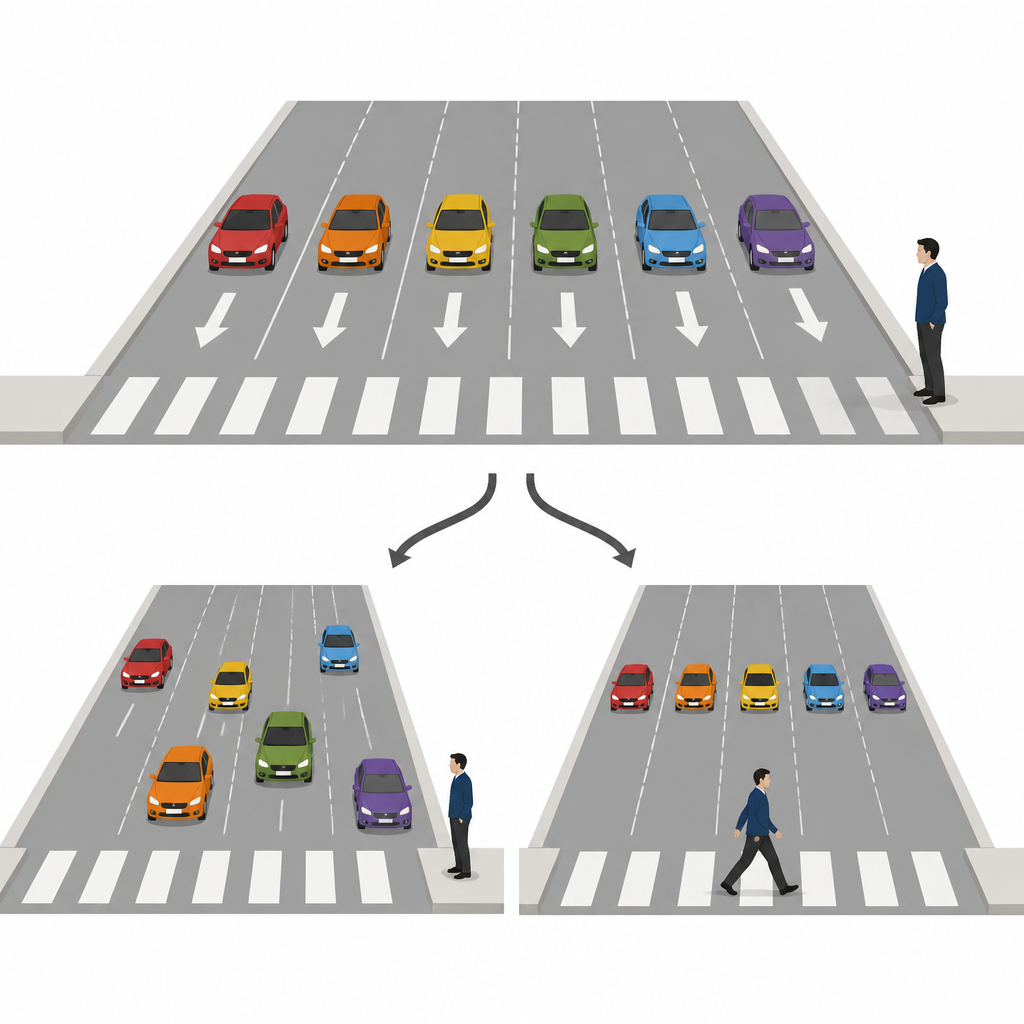
当场景显得杂乱时,我们更没有把握
在所有任务版本中,当车辆距离较远且移动方式可预测时,人们更愿意过街且更有信心。当研究者通过让车辆速度分布更广来增加“场景可变性”时,人们报告的信心下降,并且将情形评为更有风险,尽管车辆到达斑马线的时序被安排为在原则上客观危险程度相同。高可变性场景中,参与者的过街尝试更少,需要更长时间才会接受一个间隙为安全。
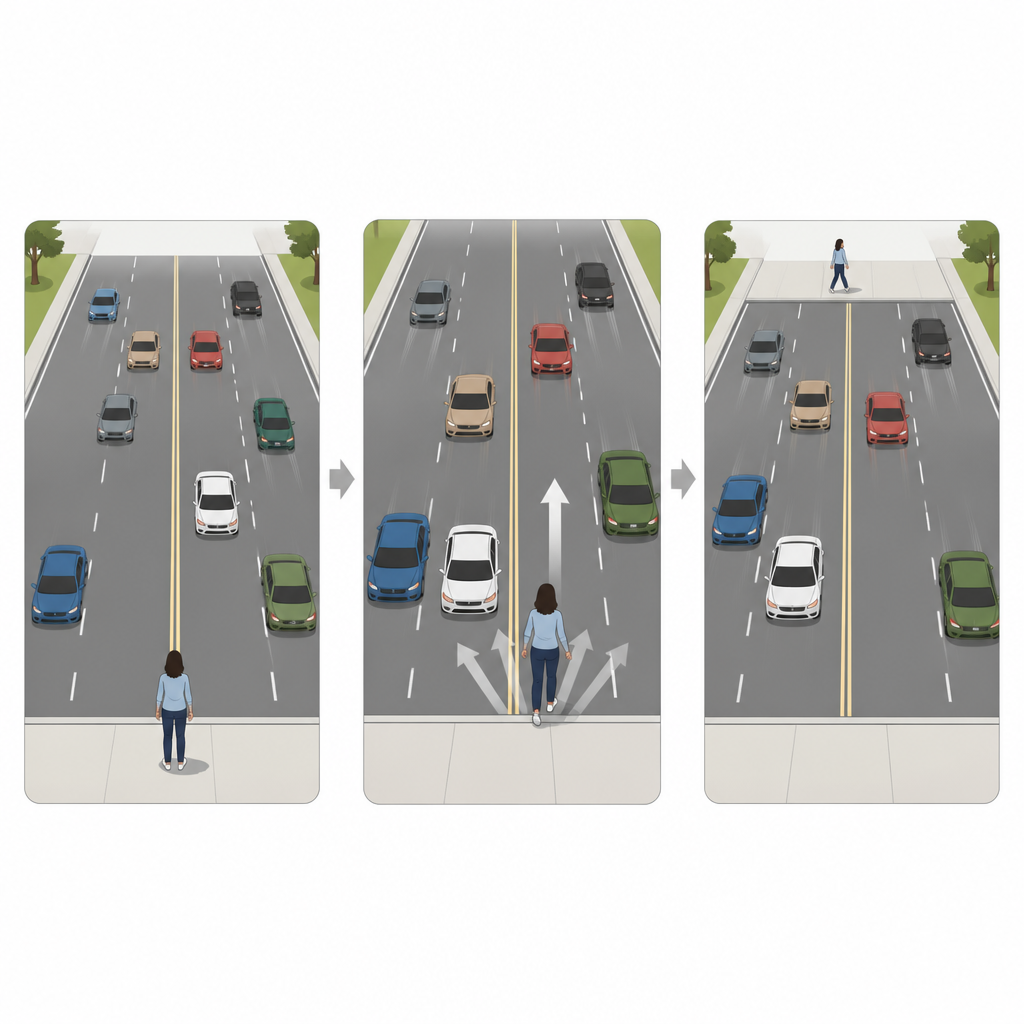
先犹豫,后加速
在选择过街的试验中,参与者的动作也随场景可变性而改变。当车辆速度更为混杂时,人们推迟了从人行道踏出的时刻。然而一旦决定出发,他们在过马路时会略微加快步伐。那些起步较晚的人往往加速更多,这表明人们会在行走过程中灵活进行即时调整以弥补失去的时间,仍能安全通过。尽管他们感到不那么有把握并在何时出发上更谨慎,但他们实际过街的成功率仍然很高,在简单与复杂场景间并无显著差异。
我们的眼睛如何扫描道路
团队还跟踪了参与者的注视点。在判断与过街任务中,人们很快聚焦于接近的车辆,尤其是最近的车道。那些以高信心结束或决定过街的试验显示出快速关注车辆、随后较早移开注意力的模式,仿佛已经做出决定,注意力可以转向其他地方。车辆速度的可变性本身并未强烈改变眼动模式。相反,注视行为更紧密地与最终是否有足够把握去过街或选择停留有关。
从虚拟过街到现实选择
研究表明,即便场景中额外的运动并不真正增加危险,它也能让人们感到更不确定、减少选择安全行动的次数并推迟动作,同时身体会悄然调整以保持结果的成功。换言之,混乱的交通会动摇我们的信心,但并不一定损害实际表现。理解视觉杂乱和我们自身确定感如何影响决策与运动,有助于改进行人行为模型、设计更好的虚拟安全过街训练,并阐明为何有些人会觉得繁忙街道尤其难以判断。
引用: Aguilar-Lleyda, D., González-Del Pozo, A., López-Moliner, J. et al. Scene variability affects action decisions, confidence and behaviour dynamics. Commun Psychol 4, 83 (2026). https://doi.org/10.1038/s44271-026-00448-1
关键词: 过街, 决策, 信心, 虚拟现实, 眼动