Clear Sky Science · zh
通过区分左转和右转试验揭示人类路径积分中的持续偏差
为什么有些人更容易迷路
大多数人都有过在林间小道、停车场或无窗走廊中迷失方向的令人不安的感觉。本研究提出了一个简单却有力的问题:当我们在没有明显地标的情况下试图返回时,我们是否都会犯相同类型的错误,还是每个人在转向和判断距离方面都有自己内在且持久的偏差?通过将左转路线和右转路线仔细分开,作者揭示了我们内部方向感中通常在对多人数据取平均时被抹去的隐性、持续的怪癖。
没有地标时寻找回家的路
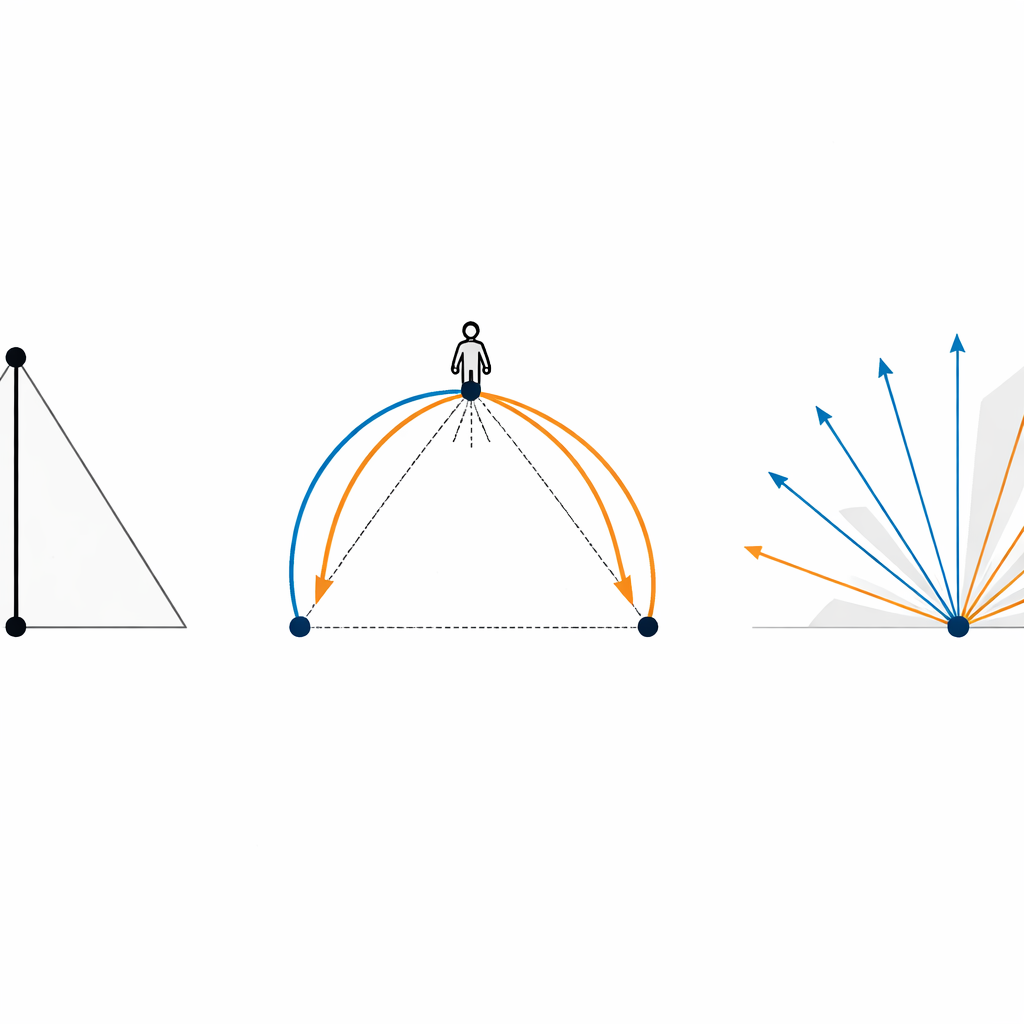
当我们在黑暗中行走、穿过浓密的树林或在特征稀少的沙漠里时,就无法再依赖标志、建筑或远处的山脉来判断自己所在的位置。相反,大脑持续累加微小的移动和转向变化来追踪当前位置相对于起点的位置,这一过程称为路径积分。研究这一过程的经典方法是三角形完成任务:志愿者被引导走过三角形的两条边,然后必须沿第三条缺失的边找到回到起点的路。要成功,他们必须正确估计转向角度和行走距离。以往的研究几乎总是在群体层面上分析,结果显示人们在总体上往往会低估转角和距离。
细看左转与右转
作者怀疑这种群体层面的结论可能掩盖了重要的个体差异。在早期的研究中,有些人在盲fold情况下仍表现出明显的个人倾向,即更倾向于向某一侧转。然而,多数研究将左转和右转试验混合在一起,这实际上抵消了此类偏差。为了解决这一问题,研究团队首先重新审查了11项有影响力的人类导航研究的原始数据,这些数据允许将左右试验分开。他们为每个人计算了两个分量:一个“对称”分量,捕捉他们总体上是多转还是少转(与方向无关);另一个“非对称”分量,反映稳定的左倾或右倾偏好。在数百名参与者中,这两个分量在个体间差异很大,许多人表现出强烈的侧向特异性偏差,而这些偏差在将所有数据合并时消失了。
在虚拟现实中测试个人偏差
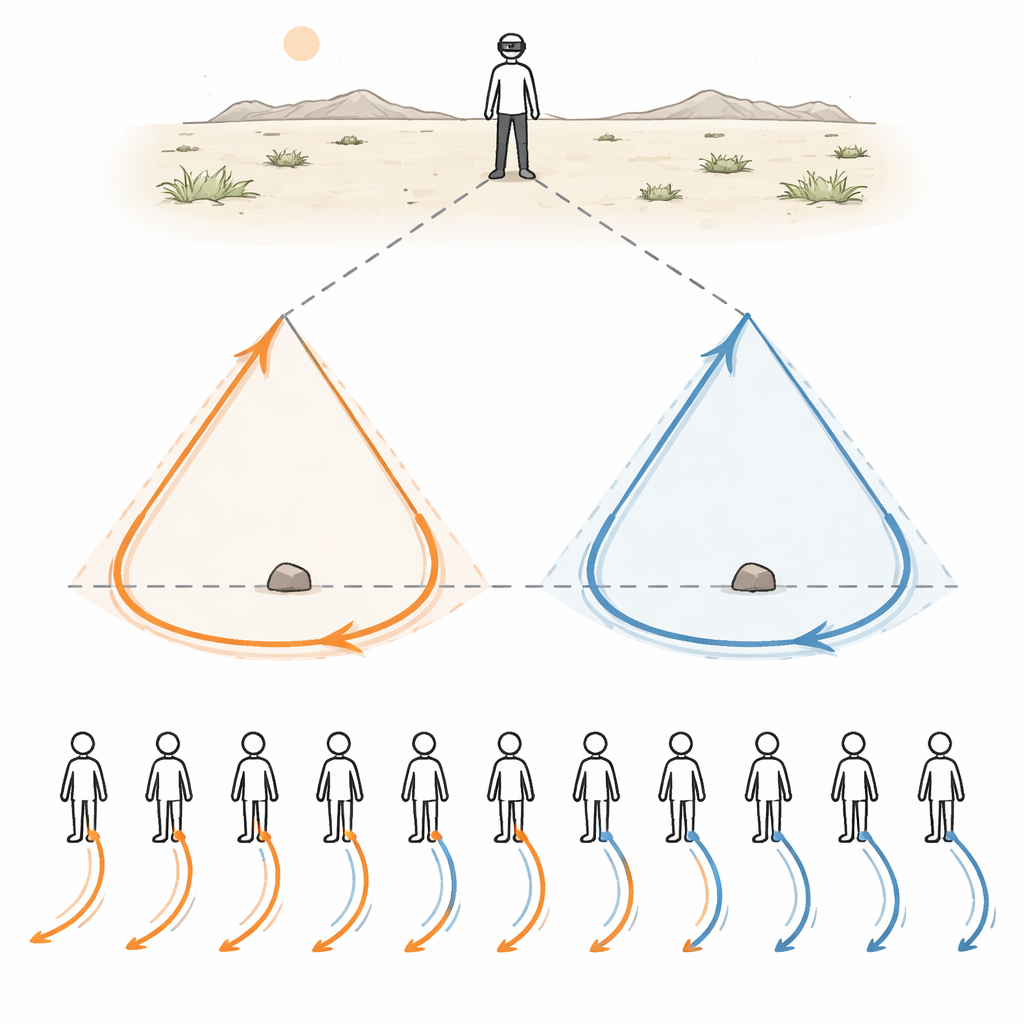
接着,研究人员在一个大规模的虚拟现实沙漠中进行了自己精心控制的实验,使用键盘控制和非常稀疏的视觉线索。27名志愿者重复执行大量三角形完成任务,三角形要么全部为左转,要么全部为右转,并且使用了两种不同的三角形形状。这个丰富的数据集使团队能够估计每个人在方向和距离上的对称与非对称误差。他们发现,有些人始终转得过多,有些人转得不足,许多人在左转与右转时有稳定的偏好——向左偏或向右偏。这些模式并非短暂:当参与者至少在三周后回来重复测试时,这些偏差仍然清晰可见,并且在角度截然不同的三角形中以缩放的形式延续。
转向误差如何拉伸距离判断
由于角度和距离在任何几何路径中紧密相关,团队还考察了方向性错误与行走距离误差之间的关系。他们表明,当某人的内部转向估计被扭曲时,这往往也会使内部计算的回家路段距离产生偏差。在此处使用的虚拟三角形中,通常转超角度的人也会走得太远,而转角不足的人往往停得太早。方向和距离的对称误差之间存在明显的相关性,并且左右偏差之间也有类似关系的迹象。这表明,表面看起来像是对距离判断的失败,有时可以追溯到对方向的偏见性表征。
这对日常导航意味着什么
几十年来,路径积分研究常常将“系统性”的导航错误描述为人人共享的特征。本研究表明,这类平均值可能具有误导性。许多人在将转向与距离结合时拥有持久且特有的偏差,尤其是在比较左手路径与右手路径时。这些个人怪癖足够强大以产生影响,但又足够微妙,在科学家仅查看群体均值时会消失。识别并测量这些个体模式对于建立更好的人人导航模型、理解为何有些人更容易迷路,以及设计不会无意中隐藏其欲解释偏差的未来实验至关重要。
引用: Scherer, J., Müller, M.M., Kroehnert, A. et al. Uncovering persistent biases in human path integration by separating left and right trials. Sci Rep 16, 11611 (2026). https://doi.org/10.1038/s41598-026-44217-w
关键词: 空间导航, 路径积分, 虚拟现实, 方向性偏差, 个体差异