Clear Sky Science · zh
鱼类在反复接触中适应并动态躲避靠近的机械鱼
机器人如何帮助真实鱼类
想象可以在没有渔网或围栏的情况下,将野生鱼类轻柔地引离漏油区域或受污染的河段。本研究探讨小型仿鱼机器人是否有朝一日能做到这一点,通过学习真实鱼类在“邻居”机器人反复向它们游来时的反应。研究表明,即便是被设计成看起来像无害同伴的机器人,如果移动方式不当,也会很快被感知为威胁。
伪装成鱼的机器人
研究者使用了特立尼达孔雀鱼,这是一种常见于急流的小型群居淡水鱼。团队没有使用金属外观的潜航器,而是采用了与真实孔雀鱼在体型和外形上高度相似的3D打印鱼型复制品。该复制品由藏在水槽底部的轮式机器人牵引,因此在孔雀鱼看来,它像另一条在恒定深度自然滑行的鱼。架空摄像头对活体鱼和机械鱼进行了精细追踪,使科学家能够精确观察孔雀鱼在机器人靠近时如何加速、减速或转向。
遭遇是如何安排的
每次试验遵循一个简单流程。将一只雌性孔雀鱼置于与机械鱼同一的大而浅的水槽中。待孔雀鱼适应后,机器人会在鱼约40厘米远时开始,以预设速度(15至30厘米/秒之间)直线向其游来。接近持续到机器人非常靠近或直到孔雀鱼明显开始逃离为止。对每条鱼多次重复这一过程,并将不同速度的出现顺序打乱,以便鱼类无法轻易预测下一次的来袭速度。
从好奇到谨慎
起初,孔雀鱼表现出混合反应:有时靠近机器人,有时缓慢漂动,常常则游开。随着试验进行,明显的模式出现:鱼变得越来越警惕。甚至在机器人缩短距离之前,它们更可能已经开始远离。许多个体还花大量时间贴着水槽墙壁游动,这是被称为触壁趋向(thigmotaxis)的典型焦虑行为,在多种动物中与感知到的危险相关。一条特别谨慎的鱼在机器人靠近时几乎完全僵住,这是一种猎物动物常见的防御姿态,有助于避免被发现或为快速逃跑做准备。
速度、距离与突然躲闪
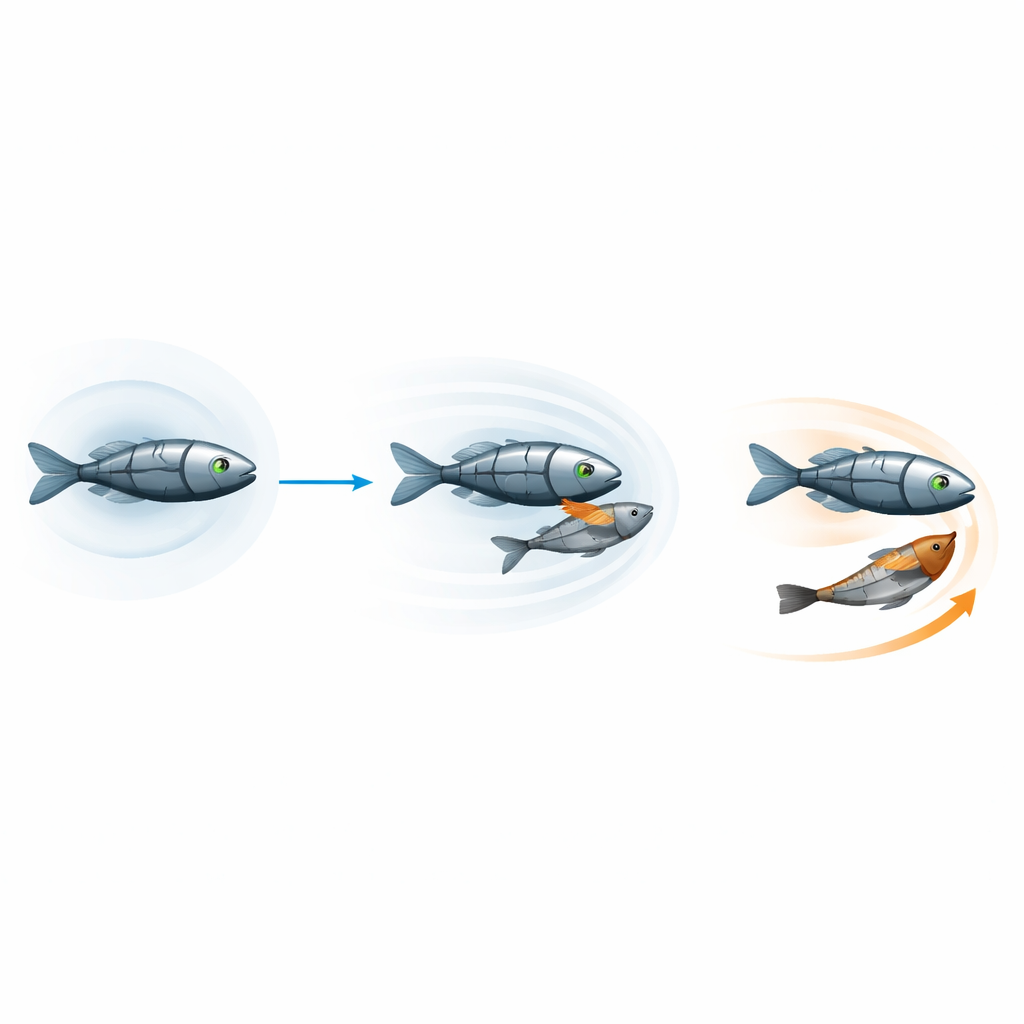
对数千帧视频的仔细分析显示,孔雀鱼的逃逸行为并非仅由距离触发。鱼类在机器人靠近时倾向于加速,但当机器人接近得更快时反应更为强烈。当机器人既近又快时,孔雀鱼最有可能做出急剧的突然转向,随后猛然加速——类似于躲避真实捕食者的逃逸动作。当鱼已经快速游开时,往往不需要如此戏剧化的动作;它们会依靠持续加速和小幅路线修正来保持领先于迎面而来的机器人。
这些发现为何重要
几十年来,鱼群计算模型通常把躲避视为一个简单规则:当邻居在某一距离内时就远离。该研究表明现实更为复杂。鱼类会根据机器人接近的速度、接触的频率,甚至个体性情来调整反应。这一更丰富的图景对生物学和技术都有意义。对生物学家而言,它提供了动物如何在实时中平衡风险与移动的更清晰视角。对工程师而言,它为未来仿鱼机器人的设计提供了具体线索——它们应如何移动、能够接近多近、以及反复遭遇如何改变动物行为——从而使机器人有朝一日能帮助将野生动物安全引离危险,而非成为新的压力源。
引用: Van Havermaet, S., Gerken, A., Mazrekaj, D. et al. Fish adapt and dynamically avoid an approaching robotic fish across repeated exposures. Sci Rep 16, 14248 (2026). https://doi.org/10.1038/s41598-026-44115-1
关键词: 机械鱼, 孔雀鱼行为, 动物与机器人互动, 逃逸反应, 集体运动