Clear Sky Science · pl
Ryby dostosowują się i dynamicznie unikają nadciągającej robotycznej ryby podczas powtarzanych kontaktów
Roboty pomagające prawdziwym rybom
Wyobraź sobie możliwość delikatnego skierowania dzikich ryb z dala od plamy oleju lub zanieczyszczonego odcinka rzeki bez użycia sieci czy zapór. Badanie to sprawdza, czy małe, rybie roboty mogłyby kiedyś robić dokładnie to, ucząc się, jak prawdziwe ryby reagują, gdy robotyczny „sąsiad” wielokrotnie podpływa do nich. Praca pokazuje, że nawet robot zaprojektowany tak, by przypominać nieszkodliwego towarzysza, może szybko zacząć być postrzegany jako zagrożenie — jeśli porusza się w niewłaściwy sposób.
Robot udający rybę
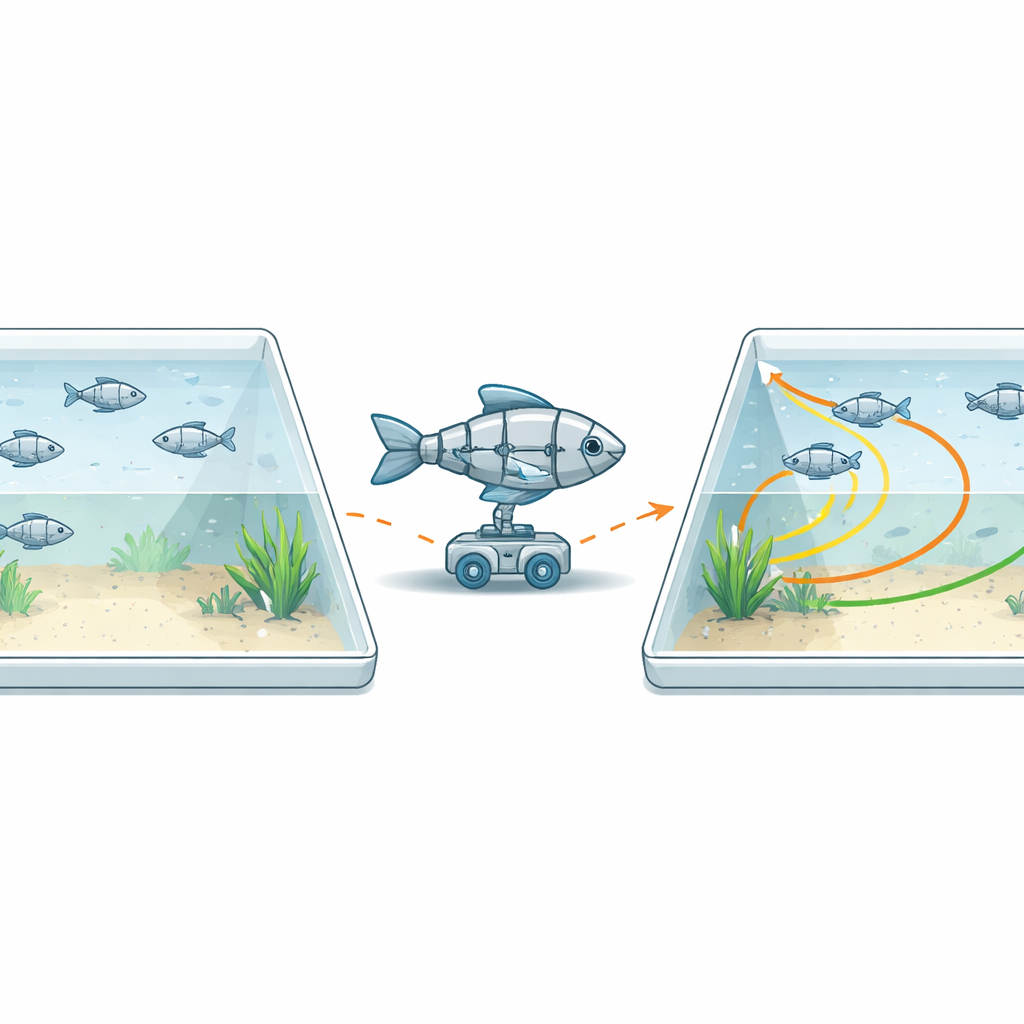
Naukowcy użyli gupików trynidadzkich, małych, społecznych ryb słodkowodnych często spotykanych w szybkopłynących strumieniach. Zamiast metalicznie wyglądającego miniaturowego okrętu zespół wykorzystał wydrukowaną w 3D replikę ryby, która bardzo dobrze odpowiada rzeczywistem rozmiarowi i kształtowi gupika. Replika jest ciągnięta po dnie zbiornika przez kołowy robot ukryty pod podłogą, więc z perspektywy gupików wygląda jak inna ryba płynąca naturalnie na stałej głębokości. Kamery umieszczone nad zbiornikiem śledziły zarówno żywe ryby, jak i robotyczną rybę w dużych szczegółach, pozwalając naukowcom zobaczyć, jak dokładnie gupiki przyspieszają, zwalniają lub skręcają, gdy robot się zbliża.
Jak aranżowano spotkania
Każde doświadczenie przebiegało według prostego scenariusza. Pojedynczą samicę gupika umieszczano w dużym, płytkim zbiorniku razem z robotyczną rybą. Gdy gupik miał czas się uspokoić, robot czekał, aż ryba znajdzie się w odległości około 40 centymetrów, po czym zaczynał płynąć prosto w jej stronę z ustaloną prędkością między 15 a 30 centymetrów na sekundę. Podejście trwało, aż robot znalazł się bardzo blisko lub aż gupik wyraźnie zaczął się oddalać. Sekwencję tę powtarzano wielokrotnie dla każdej ryby, a kolejność prędkości robota była mieszana, by ryba nie mogła łatwo przewidzieć, jak szybko następnym razem za nią podpłynie.
Z ciekawości do ostrożności
Początkowo gupiki wykazywały mieszane reakcje. Czasami podpływały do robota, czasami dryfowały wolno, a często odpływały. W miarę trwania prób wyłonił się jednak wyraźny wzorzec: ryby stawały się coraz bardziej ostrożne. Nawet zanim robot zmniejszył dystans, częściej poruszały się już w stronę ucieczki. Wiele osobników spędzało też dużo czasu przyklejając się do ścianek zbiornika, co jest klasycznym objawem lęku znanym jako tigmotaksja, powiązanym z postrzegalnym zagrożeniem u wielu gatunków zwierząt. Jedna szczególnie ostrożna ryba często niemal całkowicie zastygała, gdy robot się zbliżał — dobrze znana postawa obronna u ofiar, która pomaga uniknąć wykrycia lub przygotować się do szybkiej ucieczki.
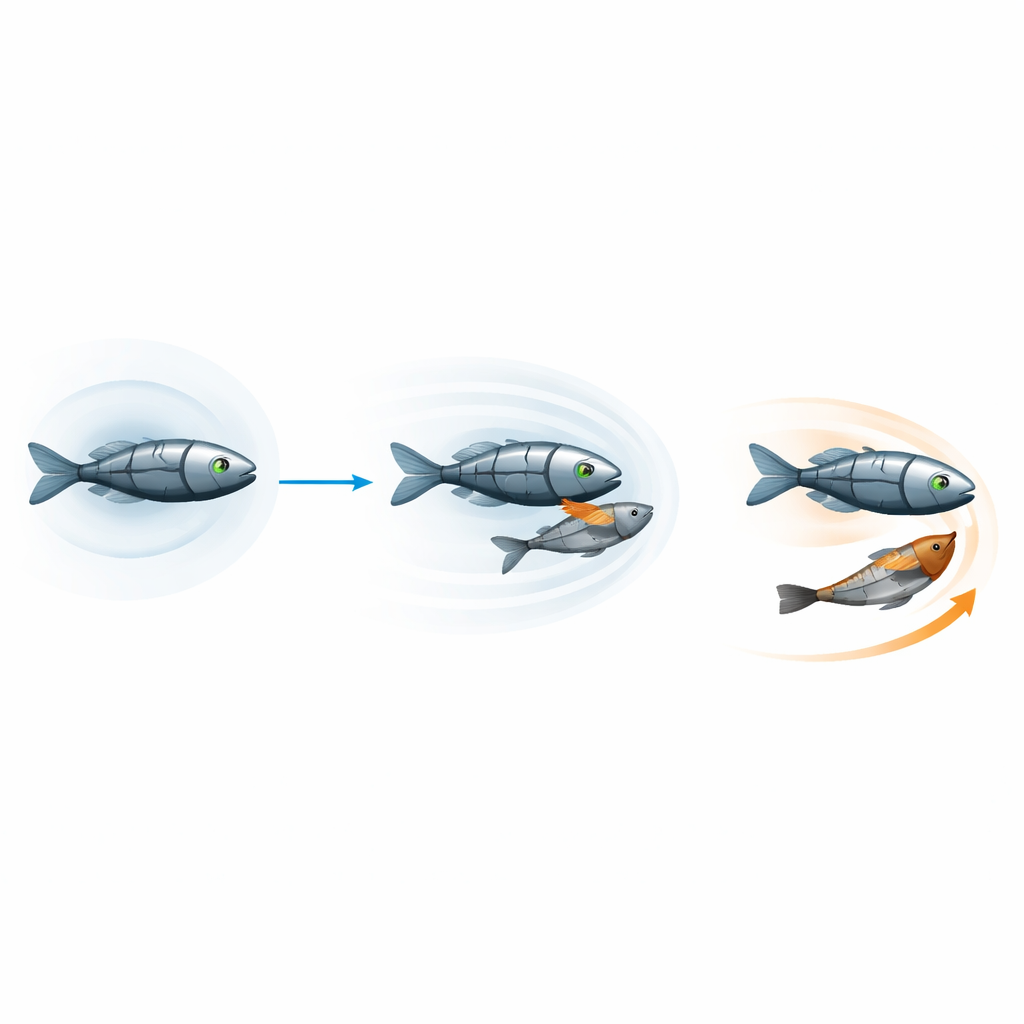
Prędkość, odległość i nagłe uniknięcia
Wnikliwa analiza tysięcy klatek wideo ujawniła, że zachowanie ucieczkowe gupików nie było wywoływane wyłącznie przez samą odległość. Ryby miały tendencję do przyspieszania w miarę zbliżania się robota, ale reagowały też silniej, gdy podchodził on szybciej. Gdy robot był jednocześnie blisko i szybki, gupiki najczęściej wykonywały ostre, nagłe skręty połączone z eksplozjami przyspieszenia — manewry przypominające ucieczkę, wykorzystywane do omijania prawdziwych drapieżników. Gdy ryby już poruszały się szybko w stronę oddalenia, często nie potrzebowały tak dramatycznych ruchów; zamiast tego polegały na stałym przyspieszaniu i drobnych korektach kursu, by utrzymać przewagę nad nadciągającym robotem.
Dlaczego te odkrycia są ważne
Przez dziesięciolecia komputerowe modele ławic ryb zwykle traktowały unikanie jako prostą zasadę: odejdź, gdy sąsiad znajduje się w określonej odległości. To badanie pokazuje, że rzeczywistość jest bardziej zniuansowana. Ryby dostosowywały swoje reakcje w zależności od tego, jak szybko robot na nie nadpływał, jak często go widziały, a nawet od indywidualnego temperamentu. Ten bogatszy obraz ma znaczenie zarówno dla biologii, jak i technologii. Dla biologów daje jaśniejszy wgląd w to, jak zwierzęta w czasie rzeczywistym równoważą ryzyko i ruch. Dla inżynierów dostarcza konkretnych wskazówek projektowych dla przyszłych robotów przypominających ryby — jak szybko powinny się poruszać, jak blisko mogą się zbliżać i jak powtarzane spotkania zmieniają zachowanie zwierząt — tak aby roboty mogły pewnego dnia pomóc bezpiecznie kierować dziką faunę z dala od niebezpieczeństwa, zamiast tworzyć nowe źródła stresu.
Cytowanie: Van Havermaet, S., Gerken, A., Mazrekaj, D. et al. Fish adapt and dynamically avoid an approaching robotic fish across repeated exposures. Sci Rep 16, 14248 (2026). https://doi.org/10.1038/s41598-026-44115-1
Słowa kluczowe: robotyczna ryba, zachowanie gupików, interakcja zwierzę-robot, reakcje ucieczkowe, ruch zbiorowy