Clear Sky Science · ar
تتكيف الأسماك وتتجنّب ديناميكياً سمكة روبوتية تقترب عبر تكرار المواجهات
الروبوتات تساعد الأسماك الحقيقية
تخيل أن بإمكانك توجيه الأسماك البرية بلطف بعيدًا عن بقعة نفط أو مقطع ملوث من نهر دون استخدام شباك أو حواجز. تستكشف هذه الدراسة ما إذا كانت روبوتات صغيرة تشبه الأسماك يمكن أن تفعل ذلك يومًا ما عن طريق تعلّم كيفية استجابة الأسماك الحقيقية عندما يسبح "جار" روبوتي نحوها بشكل متكرر. تُظهر النتائج أن حتى روبوتاً مصمماً ليبدو كرفيق غير ضار يمكن أن يبدأ سريعًا في الإحساس بأنه تهديد—إذا تحرّك بالطريقة الخاطئة.
روبوت يتظاهر بكونه سمكة
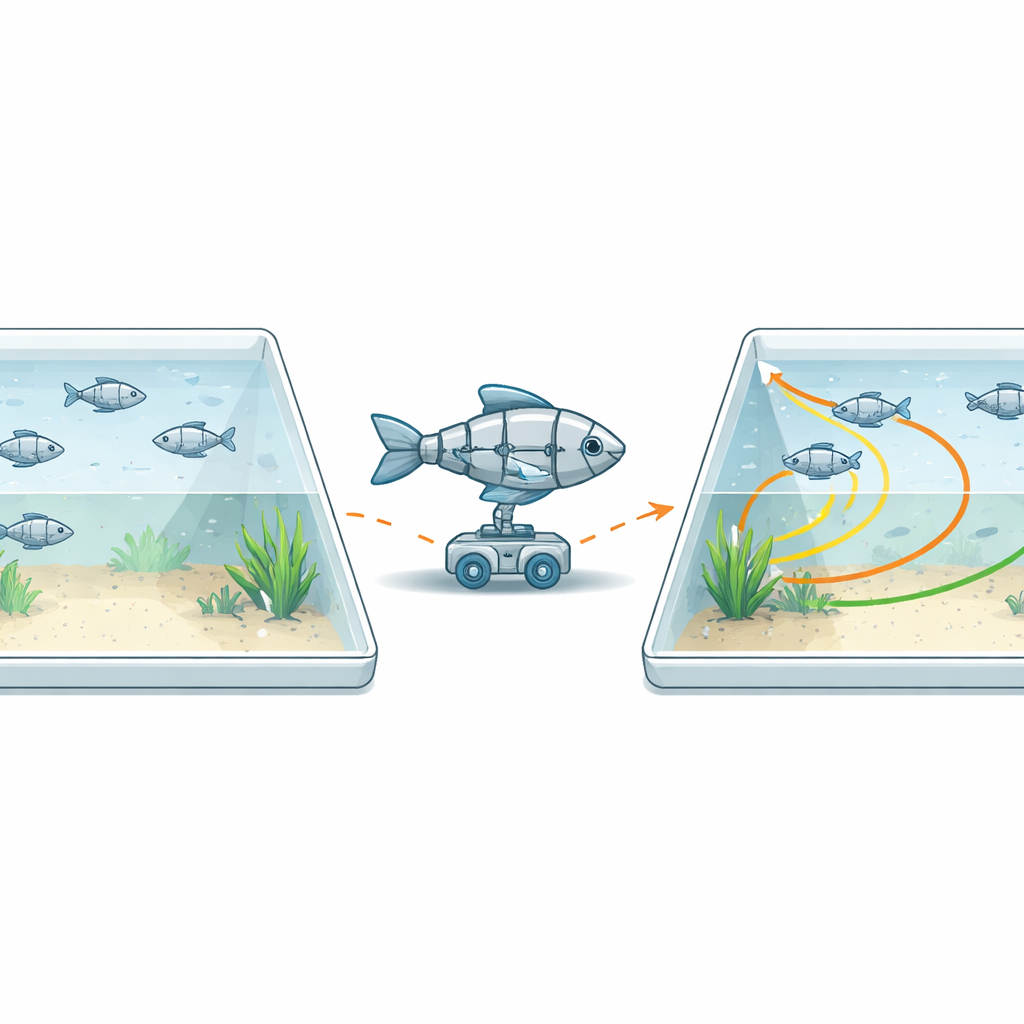
استخدم الباحثون سمك الغوبي الترينيدادي، وهو سمك عذب صغير واجتماعي يُوجد عادة في الجداول السريعة الحركة. بدلاً من غواصة بمظهر معدني، اعتمد الفريق على نسخة مطبوعة ثلاثية الأبعاد تطابق الغوبي الحقيقي في الحجم والشكل. تُسحب هذه النسخة حول الحوض بواسطة روبوتٍ عجلاتي مخفي تحت أرضية الحوض، لذا تبدو للغوبيات كسمكة أخرى تنزلق طبيعياً على عمق ثابت. تتعقّب كاميرات علوية كل من الأسماك الحية والسمكة الروبوتية بتفصيل دقيق، مما أتاح للعلماء رؤية كيف تسارع الغوبيات أو تبطئ أو تنحرف بدقة عندما يقترب الروبوت.
كيف رُتبت المواجهات
اتبعت كل تجربة سيناريو بسيطاً. وُضعت أنثى غوبي واحدة في حوض واسع وضحل مع السمكة الروبوتية. بعد أن هدأت الغوبي واعتادت المكان، انتظر الروبوت حتى تكون السمكة على بعد نحو 40 سنتيمتراً، ثم بدأ السباحة مباشرة نحوها بسرعة محددة مسبقاً بين 15 و30 سنتيمتراً في الثانية. استمر الاقتراب حتى أصبح الروبوت قريباً جداً أو حتى بدأت الغوبي بالتحرك بعيداً بوضوح. تكررت هذه التسلسلات مرات عديدة لكل سمكة، مع خلط ترتيب سرعات الروبوت حتى لا تتمكن الأسماك من توقع مدى السرعة في المرة التالية.
من فضول إلى حذر
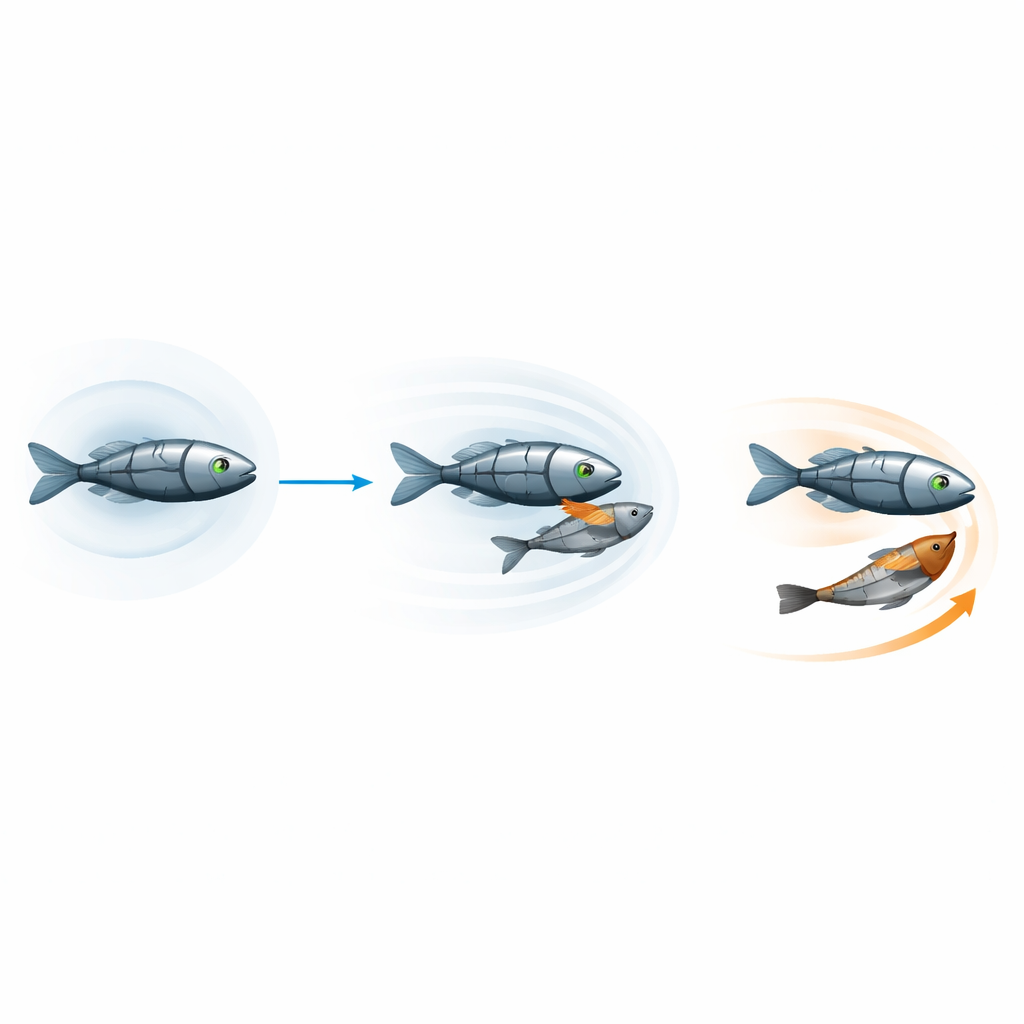
في البداية أظهرت الغوبيات مزيجاً من الردود. أحياناً اقتربت من الروبوت، وأحياناً انجرفت ببطء، وغالباً سبحت مبتعدة. ومع تقدم التجارب، برز نمط واضح: أصبحت الأسماك أكثر حذراً. حتى قبل أن يقلص الروبوت الفجوة كانت الغوبيات أكثر ميلاً للابتعاد بالفعل. كما قضت العديد من الأفراد وقتاً طويلاً تلتصق بجدران الحوض، وهو علامة كلاسيكية على القلق تُعرف بالتماس الجدار (thigmotaxis)، وقد رُبطت بإدراك الخطر في العديد من الأنواع الحيوانية. سمكة واحدة حذرة للغاية جمدت تقريباً تماماً عندما اقترب الروبوت، وهي وضعية دفاعية معروفة لدى الفرائس تساعدها على تجنّب الاكتشاف أو الاستعداد لهروب سريع.
السرعة والمسافة والمناورات المفاجئة
كشف التحليل الدقيق لآلاف لقطات الفيديو أن سلوك هروب الغوبيات لم يكن مُثاراً بالمسافة وحدها. فقد كانت الأسماك تميل إلى التسارع كلما اقترب الروبوت، لكنها أيضاً تفاعلت بقوة أكبر عندما اقترب بسرعة أكبر. حينما كان الروبوت قريباً وسريعاً معاً، كانت الغوبيات أكثر ميلاً لأداء تحوّلات حادة ومفاجئة تليها اندفاعات تسارعية—مناورات شبيهة بالهروب تشبه تلك المستخدمة لتفادي المفترسات الحقيقية. أما عندما كانت الأسماك تتحرك بالفعل بسرعة مبتعدة، فغالباً لم تحتج إلى مثل هذه الحركات الدرامية؛ بل اعتمدت على تسارع ثابت وتصحيحات مسار صغيرة للحفاظ على تقدمها أمام الروبوت القادم.
لماذا تهم هذه النتائج
على مدى عقود، اعتبرت نماذج الحواسيب لمجموعات الأسماك أن التجنّب قاعدة بسيطة: ابتعد عندما يكون جارٌ ما ضمن مسافة معينة. تُظهر هذه الدراسة أن الواقع أكثر تعقيداً. عدّلت الأسماك استجابتها اعتماداً على سرعة اقتراب الروبوت، وعدد مرات مشاهدته سابقاً، وحتى طبقاً لطباعٍ فردية. هذه الصورة الأغنى مهمة للبيولوجيا والتكنولوجيا على حد سواء. بالنسبة لعلماء الأحياء، تقدم رؤية أوضح لكيفية موازنة الحيوانات بين المخاطرة والحركة في الزمن الحقيقي. أما للمهندسين، فتوفر دلائل تصميم ملموسة لروبوتات تشبه الأسماك في المستقبل—سرعاتها المناسبة، ومدى قربها الممكن، وكيف تغير المواجهات المتكررة سلوك الحيوانات—حتى تتمكن الروبوتات مستقبلاً من مساعدة الحياة البرية على الابتعاد بأمان عن الخطر بدلاً من أن تُشكّل مصدراً جديداً للضغط.
الاستشهاد: Van Havermaet, S., Gerken, A., Mazrekaj, D. et al. Fish adapt and dynamically avoid an approaching robotic fish across repeated exposures. Sci Rep 16, 14248 (2026). https://doi.org/10.1038/s41598-026-44115-1
الكلمات المفتاحية: سمكة روبوتية, سلوك الغوبي, تفاعل الحيوان-الروبوت, استجابات الهروب, الحركة الجماعية