Clear Sky Science · zh
牵引机半主动座椅悬架模糊控制策略的性能分析
更平顺的拖拉机乘坐为什么重要
对于许多农民来说,长时间的拖拉机工作意味着数小时的颠簸、冲击和振动。除了单纯的不适,这种持续的摇动还会导致疲劳、背痛以及长期的关节和肌肉问题。这里描述的研究用高技术手段解决了一个接地气的问题:如何重新设计拖拉机座椅,使其在粗糙的田地、随机的颠簸和变化的载荷下主动保护驾驶者的身体?

在驾驶员与机器之间放一张更聪明的座椅
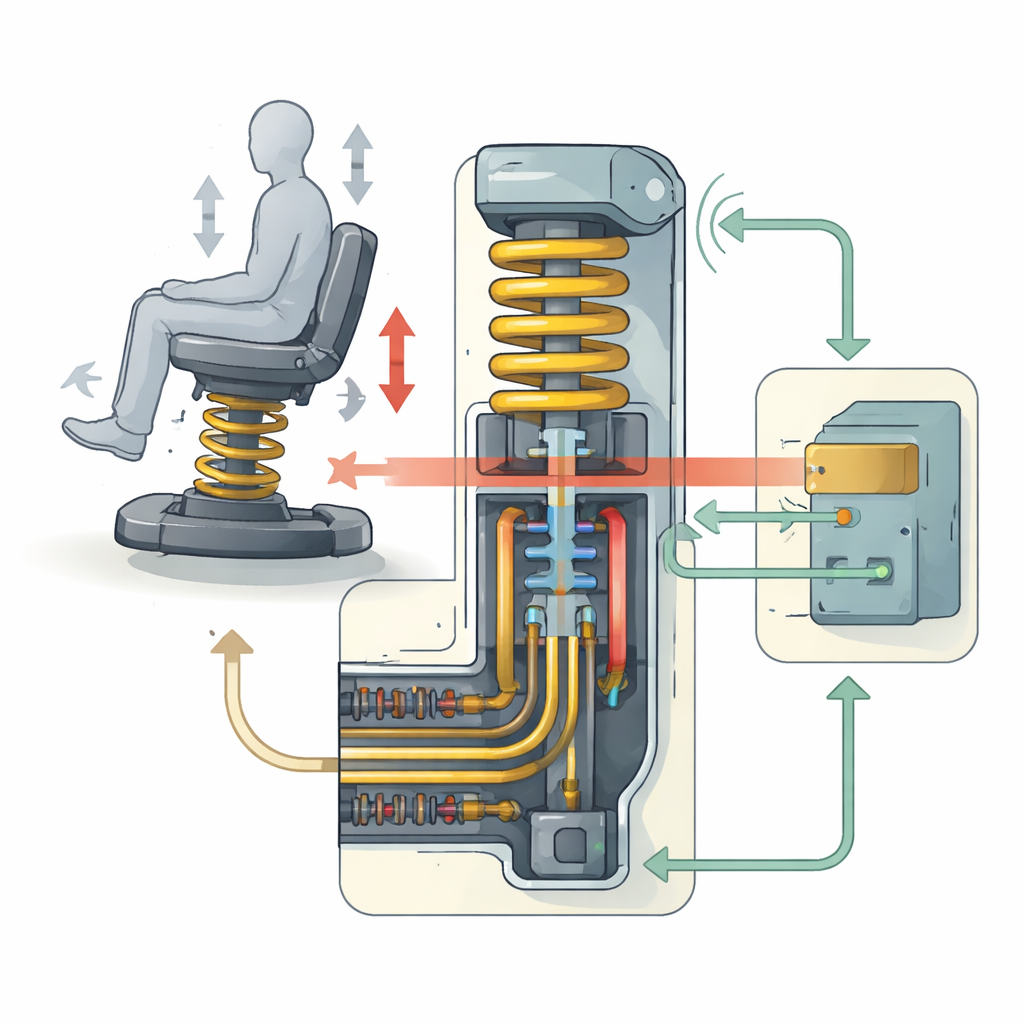
研究者把注意力放在座椅上,因为它是振动的拖拉机与驾驶员身体之间的最后一道屏障。传统座椅使用固定的弹簧和减震器,这些元件只在出厂或安装时调校一次然后长期不变。它们在一组窄范围的条件下表现尚可:特定的驾驶员体重、典型速度和中等粗糙度的地面。真实的农务工作远非如此可预测。地面软硬、车辙、速度和驾驶员体重都会变化,而固定的悬架无法适应。该团队提出了一种半主动座椅,保持其基本弹簧结构,但用一种可以实时变刚或变软的特殊流体装置替代传统阻尼器。
特殊流体如何驯服猛烈的颠簸
新座椅的核心是一种磁流变阻尼器——内装一种在磁场作用下黏度会变化的流体的缸体。当座椅运动时,阻尼器对运动产生阻力;当电信号增强磁场时,流体变稠,阻尼器变硬,吸收更多能量。信号减弱时,阻尼器“放松”,允许座椅更自由地运动。为了理解这种可调座椅的行为,研究者建立了详细的计算机模型,描述拖拉机的竖向运动和俯仰(前仰与后仰)。模型包含底盘、驾驶室、轮胎、人体与座椅的质量,以及磁流变阻尼器那种具有历史依赖性的复杂行为。
教会座椅现场做决定
阻尼器需要“大脑”来决定每一刻应提供多少阻力。作者没有依赖精确的数学公式,而是使用模糊逻辑控制,模仿人类处理诸如“如果座椅抖得很厉害,就大幅增大阻尼”这类模糊规则的方式。测试了两种版本。第一种称为一型模糊控制器,使用一组固定的规则。第二种为区间二型模糊控制器,在规则本身上增加了一层不确定性,使系统在应对有噪声的测量和变化的工况时更为从容。两种控制器都监测两个信号:座椅竖向加速度的大小和座椅相对于驾驶室的相对速度,然后据此决定阻尼器应如何响应。
崎岖道路、减速带和不同的驾驶员
为评估智能座椅的效果,团队在一系列真实工况下进行了计算机实验。他们让虚拟拖拉机行驶在代表不同田地和泥土道路粗糙程度的随机“路面”上,范围从中等到极其严重。他们还模拟以数种低速通过尖锐的三角形颠簸,并测试驾驶员与座椅合计质量从50到150千克变化时的表现。使用两个主要衡量标准:座椅对驾驶员的振动强度(以平均竖向加速度衡量)和座椅在其悬架行程内的位移幅度(因为撞到底部机械限位既不舒适也会造成损伤)。在几乎所有情形下,采用模糊控制的半主动座椅相比被动设计都显著降低了振动和座椅位移。
这些结果对农民意味着什么
研究发现,智能半主动座椅在许多类型的粗糙地面上可以将驾驶员的竖向振动减少大约一半或更多,并能将座椅行程减少40–60%,大大降低悬架极限处发生剧烈冲击的风险。在两种“脑”之间,性能更先进的区间二型模糊控制器总体上更为鲁棒,尤其在更糟的路况和剧烈颠簸时表现更佳,即便道路条件、速度或驾驶员体重发生变化,也能提供最佳的舒适性与保护平衡。就实际应用而言,这项工作表明未来的拖拉机可以配备智能座椅,自动适应田地与操作人员,有助于保护农民健康,同时在长时间、恶劣地形下支持更安全、更高效的作业。
引用: Chen, X., Wang, Z., Qiu, Y. et al. Performance analysis of fuzzy control strategy for tractor semi-active seat suspension. Sci Rep 16, 12563 (2026). https://doi.org/10.1038/s41598-026-42322-4
关键词: 拖拉机乘坐舒适性, 座椅悬架, 磁流变阻尼器, 模糊逻辑控制, 全身振动