Clear Sky Science · fr
Analyse des performances d’une stratégie de commande floue pour la suspension de siège semi‑active d’un tracteur
Pourquoi des trajets de tracteur plus doux comptent
Pour de nombreux agriculteurs, de longues journées passées sur un tracteur signifient des heures de secousses, de bosses et de vibrations tremblantes. Au‑delà de l’inconfort, ces secousses constantes peuvent provoquer de la fatigue, des maux de dos et des problèmes articulaires et musculaires à long terme. L’étude décrite ici aborde une question très concrète avec des outils de haute technologie : comment repenser le siège du tracteur pour qu’il protège activement le corps du conducteur contre les champs cahoteux, les bosses aléatoires et les variations de charge ?

Un siège plus intelligent entre le conducteur et la machine
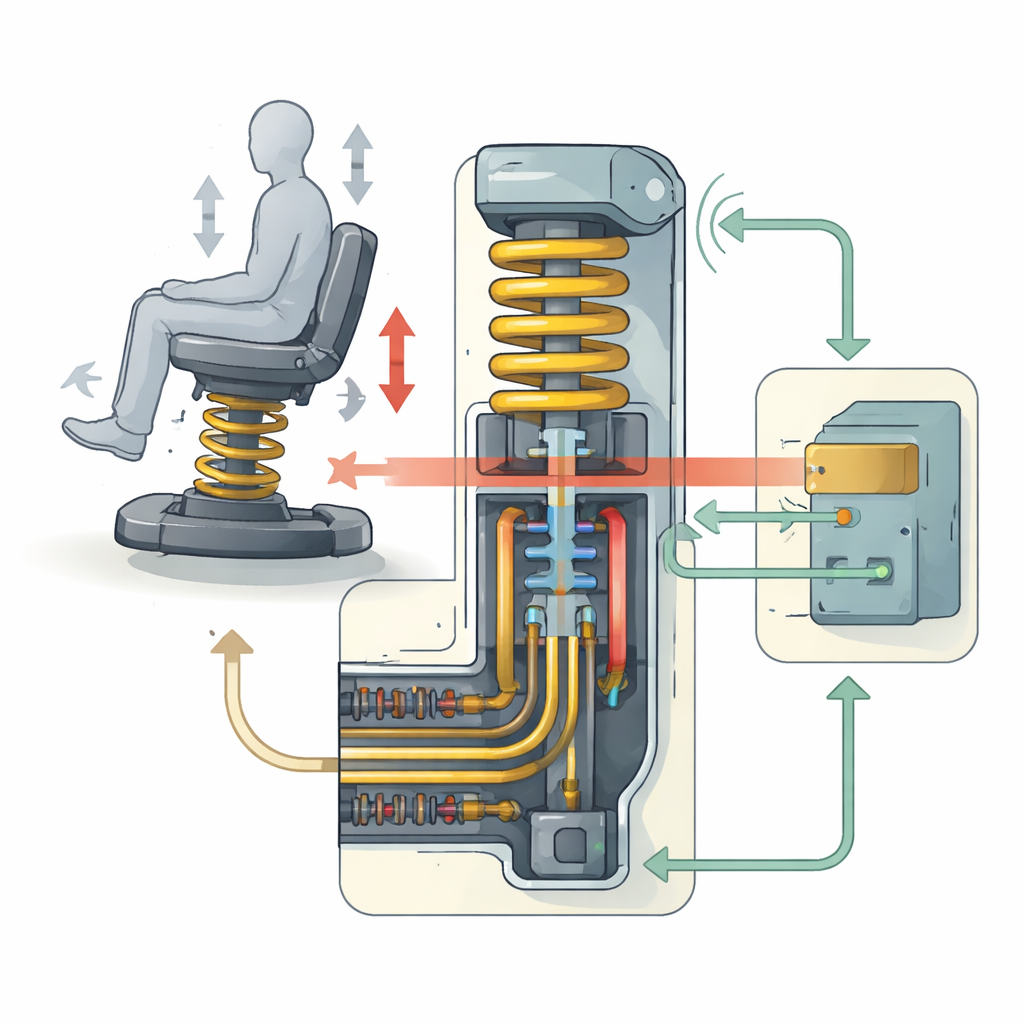
Les chercheurs se concentrent sur le siège parce qu’il constitue la dernière barrière entre le tracteur en vibration et le corps du conducteur. Les sièges traditionnels utilisent des ressorts fixes et des amortisseurs réglés une fois pour toutes. Ils fonctionnent correctement seulement pour un ensemble restreint de conditions : un certain poids du conducteur, une vitesse typique et un terrain modérément irrégulier. Le travail réel à la ferme est bien moins prévisible. La souplesse du sol, les ornières, la vitesse et le poids du conducteur changent, et une suspension fixe ne peut pas s’adapter. L’équipe propose un siège semi‑actif, qui conserve son ressort de base mais remplace l’amortisseur traditionnel par un dispositif spécial à base de fluide capable de se rigidifier ou s’assouplir en temps réel.
Comment un fluide spécial dompte les chocs violents
Au cœur du nouveau siège se trouve un amortisseur magnétorhéologique, un cylindre rempli d’un fluide dont la viscosité change sous l’effet d’un champ magnétique. Lorsque le siège bouge, l’amortisseur résiste au mouvement ; lorsqu’un signal électrique renforce le champ magnétique, le fluide s’épaissit et l’amortisseur devient plus rigide, absorbant plus d’énergie. Quand le signal faiblit, l’amortisseur « s’assouplit », laissant le siège bouger plus librement. Pour comprendre le comportement de ce siège ajustable, les chercheurs construisent un modèle informatique détaillé du mouvement vertical et du tangage (basculement avant‑arrière) du tracteur. Leur modèle inclut le châssis, la cabine, les pneus, la masse conducteur‑siège et le comportement complexe et dépendant de l’historique de l’amortisseur magnétorhéologique.
Apprendre au siège à décider en temps réel
L’amortisseur a besoin d’un cerveau pour décider, instant après instant, de la résistance à appliquer. Plutôt que de s’appuyer sur une recette mathématique précise, les auteurs utilisent une commande par logique floue, qui imite la façon dont les humains gèrent des règles vagues comme « si le siège tremble beaucoup, rigidifier fortement l’amortisseur ». Deux versions sont testées. La première, appelée contrôleur flou de type‑1, utilise un ensemble fixe de telles règles. La seconde, un contrôleur flou de type‑2 par intervalles, ajoute une couche supplémentaire d’incertitude aux règles elles‑mêmes, permettant au système de mieux gérer des mesures bruitées et des conditions changeantes. Les deux contrôleurs surveillent deux signaux : l’accélération verticale du siège et la vitesse relative du siège par rapport à la cabine. À partir de ces informations, ils déterminent l’intensité de la réaction de l’amortisseur.
Routes chaotiques, bosses et conducteurs différents
Pour évaluer l’efficacité du siège intelligent, l’équipe réalise des expériences numériques couvrant une gamme de conditions réelles. Ils font parcourir au tracteur virtuel des « routes » aléatoirement rugueuses représentant différents niveaux d’agressivité des champs et des pistes de terre, de modéré à extrêmement sévère. Ils simulent également le passage d’une bosse triangulaire aiguë à plusieurs vitesses faibles et testent l’effet de variations du poids combiné conducteur‑siège de 50 à 150 kilogrammes. Deux critères principaux sont utilisés : l’intensité des secousses transmises au conducteur (mesurée par l’accélération verticale moyenne) et l’amplitude du déplacement du siège dans sa course (puisque l’impact sur les butées mécaniques est à la fois inconfortable et dommageable). Dans presque tous les cas, le siège semi‑actif avec commande floue réduit nettement à la fois les secousses et le déplacement du siège par rapport à une conception passive.
Ce que les résultats signifient pour les agriculteurs
Les résultats montrent qu’un siège semi‑actif intelligent peut réduire les vibrations verticales subies par le conducteur d’environ moitié ou plus sur de nombreux types de terrains rugueux, et diminuer le déplacement du siège de 40 à 60 %, réduisant fortement le risque d’impacts durs en butée de la suspension. Parmi les deux stratégies testées, le contrôleur flou par intervalles de type‑2 se révèle généralement plus robuste, en particulier sur les routes plus accidentées et lors de bosses aiguës, offrant le meilleur compromis entre confort et protection même lorsque les conditions de route, la vitesse ou le poids du conducteur varient. En termes pratiques, ce travail suggère que les tracteurs futurs pourraient être équipés de sièges intelligents qui s’adaptent automatiquement au champ et à l’opérateur, contribuant à préserver la santé des agriculteurs tout en favorisant un travail plus sûr et plus efficace pendant de longues journées sur des terrains exigeants.
Citation: Chen, X., Wang, Z., Qiu, Y. et al. Performance analysis of fuzzy control strategy for tractor semi-active seat suspension. Sci Rep 16, 12563 (2026). https://doi.org/10.1038/s41598-026-42322-4
Mots-clés: confort de conduite des tracteurs, suspension de siège, amortisseur magnétorhéologique, commande par logique floue, vibration du corps entier