Clear Sky Science · he
ניתוח ביצועים של אסטרטגיית בקרה מטושטשת לבולמי מושב חצי־אקטיביים בטרקטור
מדוע נסיעות חלקות יותר בטרקטור חשובות
עבור חקלאים רבים, ימים ארוכים על טרקטור שווים שעות של זעזועים, מהמורות ורעידות. מעבר לאי‑נוחות פשוטה, הרעידה המתמדת הזו עלולה לגרום לעייפות, לכאבי גב ולבעיות ממושכות במפרקים ובשרירים. המחקר המתואר כאן מתמודד עם שאלה יומיומית בעזרת כלים מתקדמים: כיצד לעצב מחדש את מושב הטרקטור כך שיגן באופן פעיל על גופו של הנהג מפני שדות גסים, מהמורות אקראיות ושינויים בעומס?

מושב חכם בין הנהג למכונה
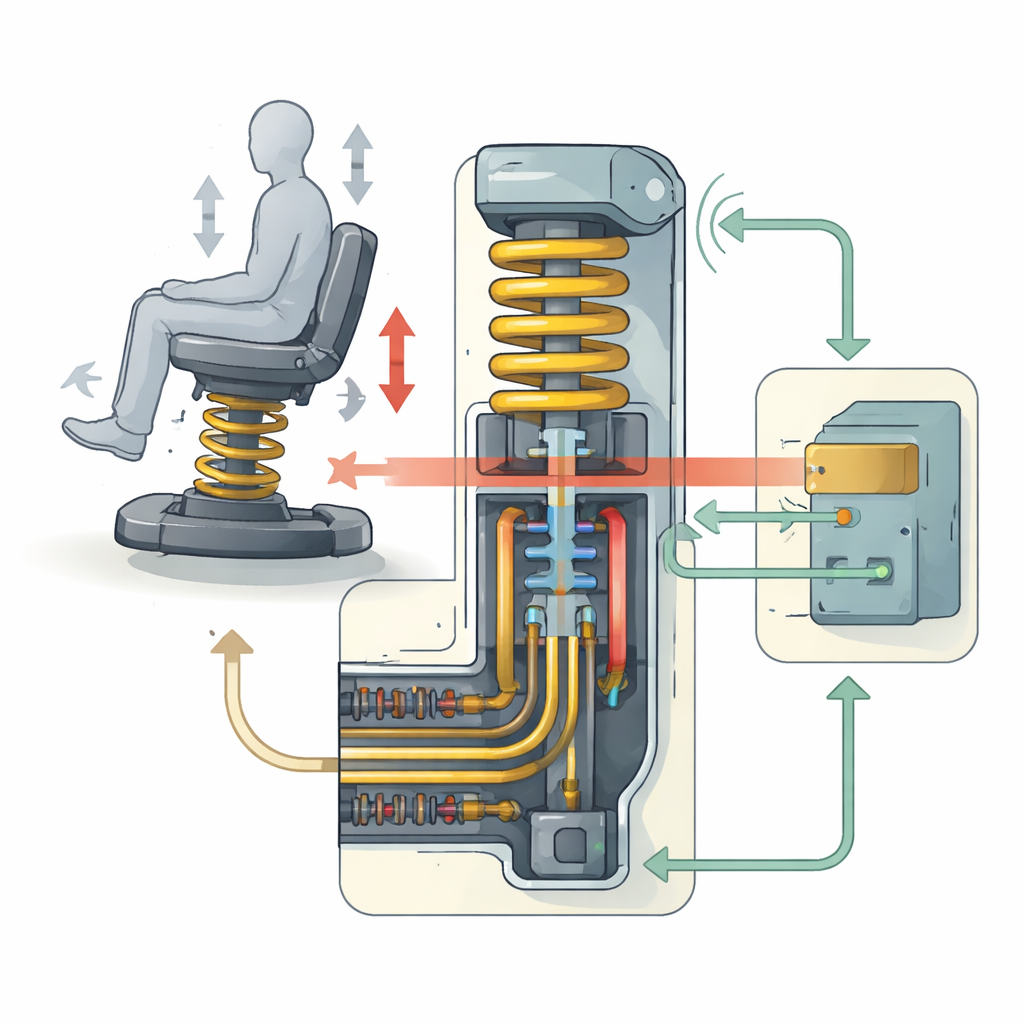
המוקד של החוקרים הוא המושב מאחר שהוא המחסום האחרון בין הטרקטור הרוטט לגוף הנהג. מושבים מסורתיים משתמשים בקפיצים ובבולמי זעזועים קבועים שמכוילים פעם אחת ונשארים ללא שינוי. הם עובדים היטב יחסית רק בתנאי טווח צר: משקל נהג מסוים, מהירות טיפוסית ושטח בינוני מבחינת גסות. עבודת שדה אמיתית רחוקה מכך. רכות הקרקע, השבילים, המהירות ומשקל הנהג משתנים כולם, ומתלה קבוע לא יכול להסתגל. הצוות מציע מושב חצי‑אקטיבי שמשאיר את הקפיץ הבסיסי אך מחליף את הבולם המסורתי במכשיר נוזלי מיוחד שיכול להתהדק או להתרכך בזמן אמת.
כיצד נוזל מיוחד מרכך מהמורות קשות
בלב המושב החדש נמצא בולם מגנטורהולוגי — צילינדר מלא בנוזל בעכירות משתנה תחת שדה מגנטי. כשהמושב זז, הבולם מתנגד לתנועה; כאשר אות חשמלי מחזק את השדה המגנטי, הנוזל מסמיך והבולם נעשה קשיח יותר וסופג יותר אנרגיה. כשהאות נחלש, הבולם "נרפה" ומאפשר תנועה חופשית יותר של המושב. כדי להבין כיצד המושב המתכוונן מתנהג, החוקרים בונים מודל ממוחשב מפורט של תנועת הטרקטור אנכית והטלטול של האף (ים‑מעלה וים‑מטה). המודל כולל את השלדה, תא הנהג, הצמיגים, מסת המושב והנהג, ואת ההתנהגות המורכבת והתלוית‑היסטוריה של הבולם המגנטורהולוגי.
לימוד המושב להחליט בזמן אמת
הבולם צריך "מוח" שיחליט, רגע אחר רגע, כמה התנגדות לספק. במקום להסתמך על נוסחה מתמטית מדויקת, המחברים משתמשים בבקר לוגיקה מטושטשת, המדמה את האופן שבו בני אדם מטפלים בכללים מעורפלים כמו "אם המושב רועד חזק, להקשיח את הבולם משמעותית." נבדקות שתי וריאציות. הראשונה, בקר מטושטשת מסוג‑1, משתמשת בקבוצת כללים קבועה. השנייה, בקר מטושטשת מסוג‑2 באינטרוול, מוסיף שכבת אי־וודאות לכללים עצמם, ומאפשר למערכת להתמודד בעדינות רבה יותר עם מדידות רעשיות ותנאים משתנים. שני הבקרים צופים בשני אותות: כמה מהר המושב מאיץ מעלה ומטה וכמה מהר המושב נע ביחס לתא הנהג. מהם הם קובעים עד כמה הבולם צריך להגיב.
דרכים גסות, מהמורות ומהרכבים שונים
כדי לבדוק עד כמה המושב החכם יעיל, הצוות מריץ ניסויים ממוחשבים במגוון תנאים מהעולם האמיתי. הם שולחים את הטרקטור הווירטואלי על "דרכים" מקריות גסות שמייצגות רמות שונות של שחיקה בשדה ובשבילי עפר, מטווח מתון עד קשה במיוחד. הם גם מדמים חציה של מהמורה משולשת חדה במהירויות נמוכות שונות ובודקים מה קורה כאשר המשקל המשולב של הנהג והמושב נע בין 50 ל‑150 קילוגרם. משתמשים בשני מדדי מפתח: עד כמה המושב מרעיד את הנהג (נמדד כהאצה אנכית ממוצעת) ועד כמה המושב נע בתוך טווח המתלה שלו (כיוון שפגיעה בתחתית העצירה המכנית היא בלתי נעימה ומזיקה). כמעט בכל המקרים, המושב החצי‑אקטיבי עם בקרה מטושטשת מקטין משמעותית הן את הרעידות והן את תנועת המושב בהשוואה לעיצוב פסיבי.
מה המשמעות של התוצאות לחקלאים
הממצאים מצביעים על כך שמושב חכם חצי‑אקטיבי יכול להפחית את רעידות הנהג האנכיות בכמחצית או יותר בסוגים רבים של קרקע גסה, ולצמצם את תנועת המושב ב‑40–60 אחוז, תוך הפחתה ניכרת של הסיכון לפגיעות קשות בקצוות המתלה. מבין שני הבקרים שנבדקו, בקר האינטרוול מסוג‑2 המתקדם בדרך‑כלל חזק יותר מבחינה עמידות, במיוחד בדרכים גסות יותר ובמהלך מהמורות חדות, ומציע את האיזון הטוב ביותר בין נוחות להגנה גם כאשר תנאי הדרך, המהירות או משקל הנהג משתנים. במונחים פרקטיים, עבודה זו מצביעה על כך שבעתיד טרקטורים יכולים להיות מצוידים במושבים חכמים שמסתגלים אוטומטית לשדה ולמפעיל, ועוזרים להגן על בריאות החקלאים תוך תמיכה בעבודה בטוחה ויעילה יותר בשעות ארוכות בשטחים תובעניים.
ציטוט: Chen, X., Wang, Z., Qiu, Y. et al. Performance analysis of fuzzy control strategy for tractor semi-active seat suspension. Sci Rep 16, 12563 (2026). https://doi.org/10.1038/s41598-026-42322-4
מילות מפתח: נוחות נסיעת טרקטור, מתלה מושב, בולם מגנטורהולוגי, בקרת לוגיקה מטושטשת, רטט כללי של הגוף