Clear Sky Science · ru
Анализ эффективности нечеткой стратегии управления полуактивной подвеской сиденья трактора
Почему более плавная езда на тракторе важна
Для многих фермеров долгие рабочие дни за рулем трактора означают часы толчков, ударов и дрожащих вибраций. Помимо простого дискомфорта, постоянная тряска может вызывать усталость, боли в спине и долгосрочные проблемы с суставами и мышцами. Исследование, описанное здесь, решает приземлённую проблему с помощью современных технологий: как перепроектировать сиденье трактора так, чтобы оно активно защищало тело водителя от неровных полей, случайных ям и меняющихся нагрузок?

Более разумное сиденье между водителем и машиной
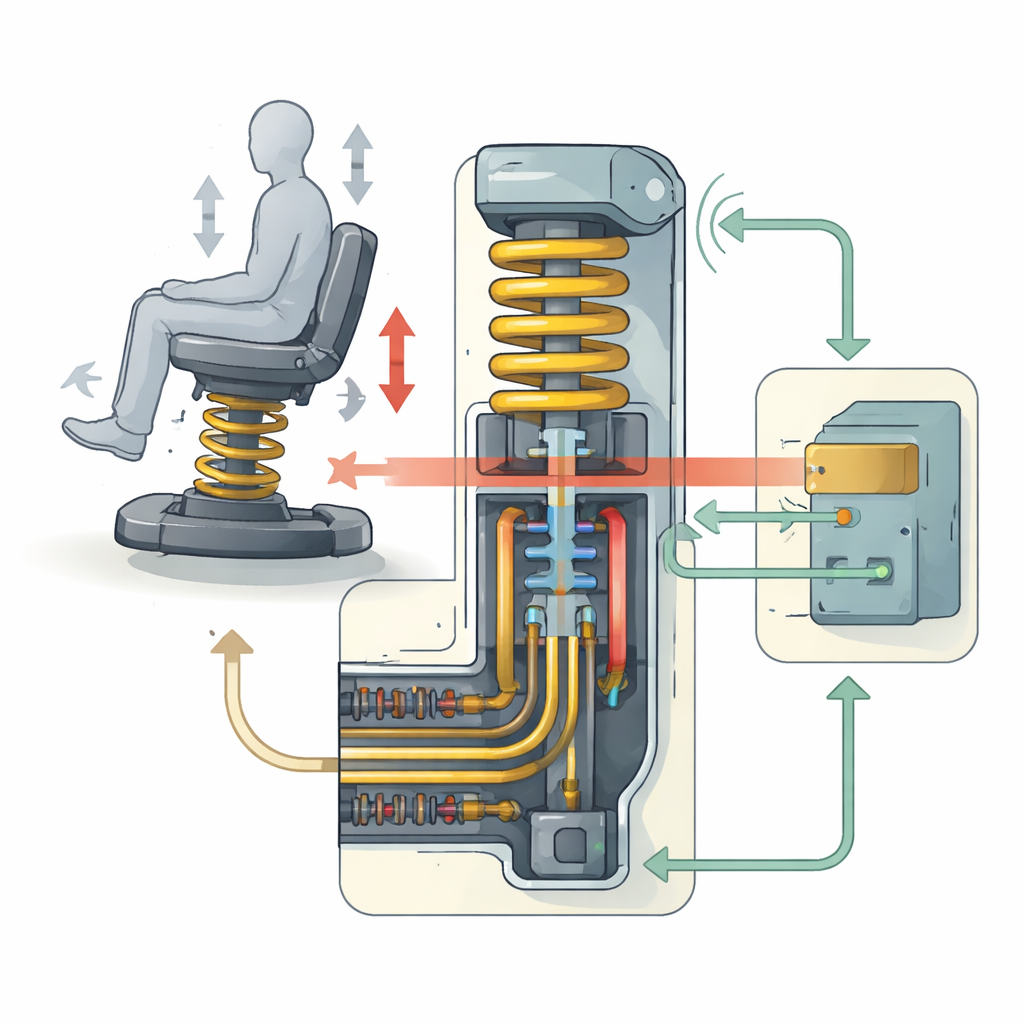
Исследователи сосредотачиваются на сиденье, поскольку оно — последняя преграда между вибрирующим трактором и телом водителя. Традиционные сиденья используют фиксированные пружины и амортизаторы, настроенные один раз и оставленные без изменений. Они работают приемлемо лишь в узком наборе условий: при определённом весе водителя, типичной скорости и умеренно неровной поверхности. Реальная фермерская работа гораздо менее предсказуема. Мягкость грунта, колеи, скорость и вес водителя постоянно меняются, а фиксированная подвеска не способна адаптироваться. Команда предлагает полуактивное сиденье, которое сохраняет базовую пружину, но заменяет традиционный демпфер специальным устройством на основе жидкости, способным в реальном времени ужесточаться или смягчаться.
Как особая жидкость смягчает резкие удары
В основе нового сиденья лежит магнитореологический амортизатор — цилиндр, заполненный жидкостью, вязкость которой меняется под действием магнитного поля. Когда сиденье движется, амортизатор противодействует движению; когда электрический сигнал усиливает магнитное поле, жидкость загустевает и амортизатор становится жестче, поглощая больше энергии. Когда сигнал ослабевает, амортизатор «размягчается», позволяя сиденью двигаться свободнее. Чтобы понять поведение этой регулируемой подвески, исследователи создают подробную компьютерную модель вертикального движения трактора и его кренов (наклона носа вверх и вниз). Их модель включает шасси, кабину, шины, массу человек+сиденье и сложное, зависящее от истории поведение магнитореологического амортизатора.
Обучение сиденья принимать решения на ходу
Амортизатору нужен «мозг», который в каждое мгновение решает, какое сопротивление обеспечить. Вместо опоры на точную математическую формулу авторы используют управление на основе нечеткой логики, имитирующее способ, которым люди оперируют расплывчатыми правилами вроде «если сиденье сильно трясётся, значительно усилить демпфирование». Были протестированы две версии. Первая, называемая нечетким контроллером типа‑1, использует фиксированный набор таких правил. Вторая, интервал‑type‑2 нечеткая система, добавляет дополнительный уровень неопределённости самим правилам, позволяя системе более грациозно справляться с шумными измерениями и меняющимися условиями. Оба контроллера отслеживают два сигнала: насколько быстро сиденье ускоряется вертикально и как быстро сиденье движется относительно кабины. На основании этих данных они решают, насколько сильно должен реагировать амортизатор.
Грубые дороги, лежачие полицейские и разные водители
Чтобы оценить эффективность «умного» сиденья, команда проводит компьютерные эксперименты в диапазоне реальных условий. Виртуальный трактор пропускают по случайно рифлёным «дорогам», моделирующим разные уровни неровностей поля и грунтовой дороги — от умеренных до крайне суровых. Также имитируют пересечение острого треугольного бугра на нескольких низких скоростях и тестируют поведение при изменении суммарного веса водителя и сиденья от 50 до 150 килограммов. В работе используются два основных показателя: насколько сильно сиденье трясёт водителя (измеряемое как среднее вертикальное ускорение) и какой ход подвески использует сиденье (поскольку касание упоров при «втыканиях» одновременно неприятно и вредно). В почти всех случаях полуактивная подвеска с нечетким управлением резко уменьшает и тряску, и ход сиденья по сравнению с пассивной конструкцией.
Что означают результаты для фермеров
Результаты показывают, что умное полуактивное сиденье может сократить вертикальную тряску водителя примерно вдвое или более на многих типах неровной поверхности и уменьшить ход сиденья на 40–60 процентов, значительно снижая риск жёстких ударов при крайних положениях подвески. Среди двух протестированных «мозгов» более продвинутая интервал‑type‑2 нечеткая система в целом оказывается более надёжной, особенно на более грубых дорогах и при резких неровностях, обеспечивая наилучшее сочетание комфорта и защиты даже при изменении состояния дороги, скорости или веса водителя. Практически это означает, что в будущем тракторы могли бы оснащаться интеллектуальными сиденьями, которые автоматически адаптируются к полю и оператору, помогая защищать здоровье фермеров и обеспечивая более безопасную и эффективную работу в длительные смены на тяжёлом рельефе.
Цитирование: Chen, X., Wang, Z., Qiu, Y. et al. Performance analysis of fuzzy control strategy for tractor semi-active seat suspension. Sci Rep 16, 12563 (2026). https://doi.org/10.1038/s41598-026-42322-4
Ключевые слова: комфорт езды на тракторе, подвеска сиденья, магнитореологический амортизатор, управление на основе нечеткой логики, вибрации всего тела