Clear Sky Science · zh
一种交互式遗传算法系统通过在具身约束下进行认知噪声过滤来自定义机器人外观
为什么更聪明的机器人设计与你息息相关
随着机器人从工厂车间走进医院、仓库,甚至我们的家庭,它们的外观不再只是风格问题。形态必须与其功能和工作场景相匹配,且越来越多时候由普通用户——而非仅是工程师——来选择或定制这些设计。本文提出了一种新方法,允许用户共同设计机器人的外观,同时在幕后确保所选外观仍遵守物理法则,并且不会超出用户的耐心或注意力。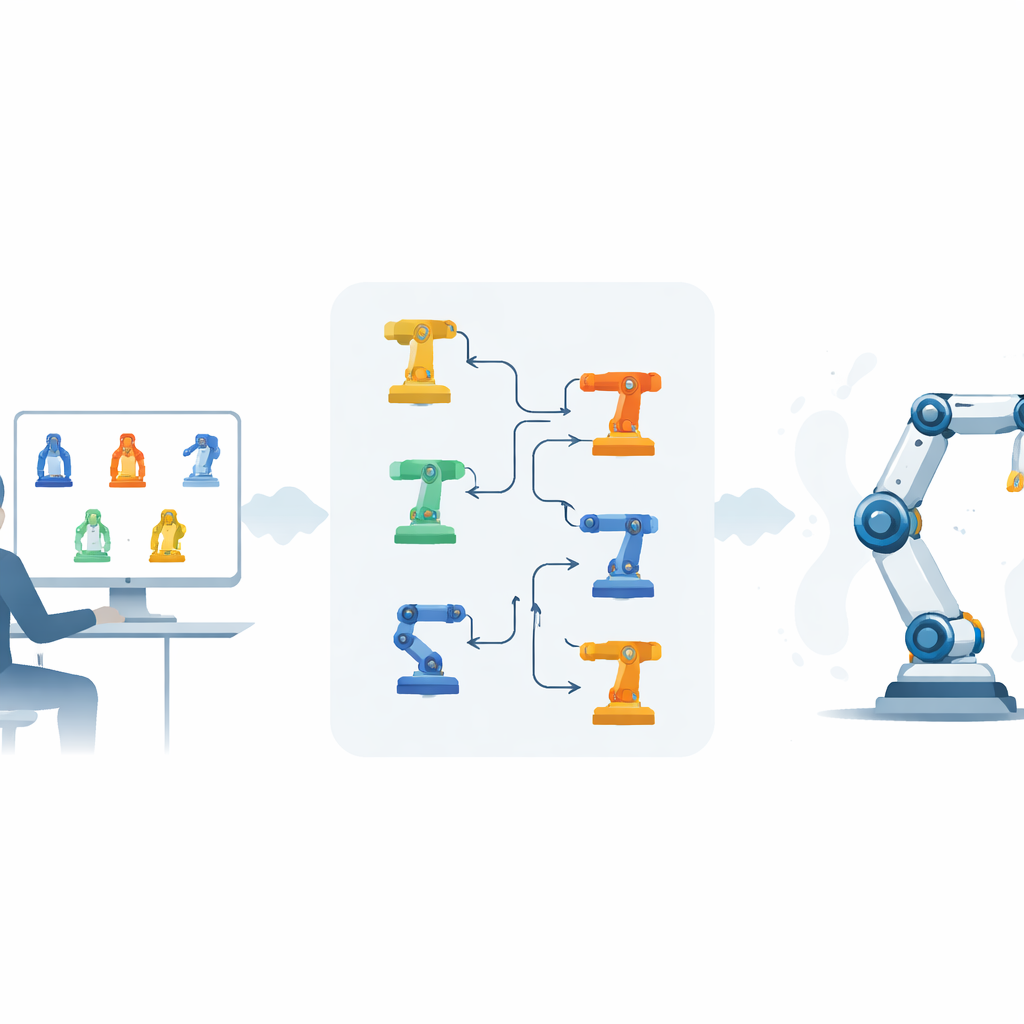
挑选机器人“样貌”的挑战
现代公司依赖批量定制:你可以定制产品,但它仍必须在可负担的制造成本内。对机器人而言,这尤其棘手。用户可能想要一个友好、圆润并带有额外装饰的巡检机器人,但这些选择很容易遮挡传感器、限制关节活动或使机器不稳。同时,用户往往在开始时并没有清晰的想法。他们的偏好模糊,长时间评估大量选项会很快疲劳,判断也可能随时波动。这种模糊的愿望、心理疲劳与工程限制的混合,常把机器人定制变成令人沮丧且低效的过程。
把模糊想法变成清晰选项
作者们通过在文字、图片与隐含设计代码之间搭建桥梁来应对“模糊想法”这一部分问题。系统并不要求人们调整技术参数,而是展示与简单描述性术语(如使用场景、躯体结构、材料或造型细节)相关联的精选机器人示例。每个示例背后都有一个结构化代码,描述关键特征,比如主要应用、关键模块和机身形态。当用户点击多个“感觉合适”的示例时,系统会提取并组合它们的特征代码,形成个人化的需求集。通过半otic分解过程——将整体设计拆解为更小且有意义的片段——使该库便于扩展,同时将模糊印象转化为清晰、机器可读的选项。
用隐藏规则保持设计的物理可行性
在工程层面,系统嵌入了作者所称的具身约束:即机器人形状、功能与环境之间的紧密联系。这些约束包括关节活动范围、结构强度、传感器可视性以及附加工具的空间等。团队将这些规则编码进知识图谱,并将其转换为兼容性矩阵,能够自动检查特征组合是否合理。例如,基于矩阵的空间检测可以识别灵巧手模块是否会与水带安装架发生碰撞,或装饰护甲是否会遮挡摄像头视野。违反这些规则的设计在用户看到或评判之前就会被过滤掉,从而减少了不必要的心理负担。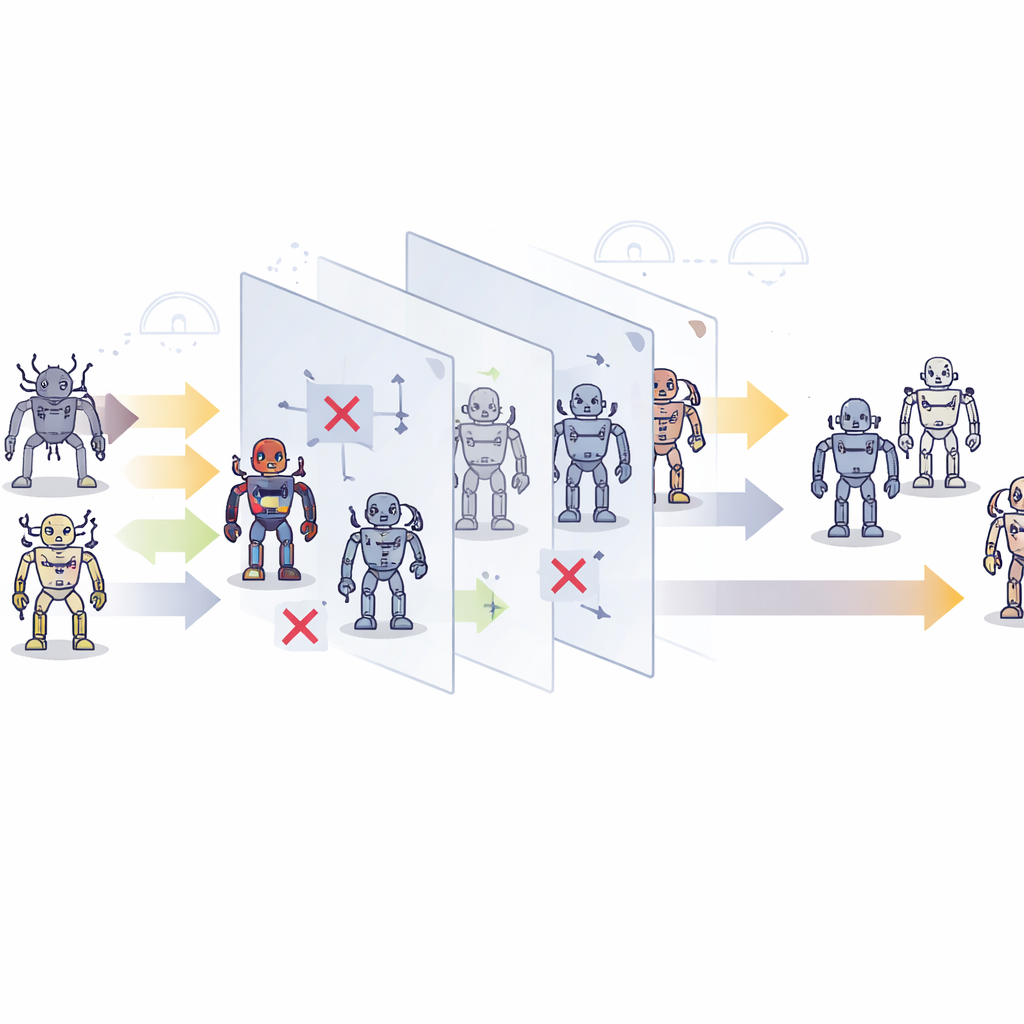
用户与算法之间不断演化的对话
系统的核心是交互式遗传算法——一种通过许多轮演化,以用户选择而非固定公式引导设计候选群体的优化方法。在这里,初始群体并非纯随机;它以先前从文本—图像—符号交互中获得的需求代码为种子,并混入一些随机个体以增加多样性。用户不需要对每个设计给出数值评分;相反,他们只需挑选偏好的候选,并可以“锁定”喜爱的特征,使其在后续轮次中保持不变。算法根据设计满足物理约束的程度自适应调整变异率,并逐步将关注点从早期世代的严格可行性转向后期的个人品味。精英保留机制确保有前景的设计在搜索过程中不会丢失。
该方法确实减轻了用户负担的证据
为验证该方法,研究人员构建了一个基于云端的工业设计平台,并邀请了120名志愿者——包括设计专家和非专家——为复杂的真实环境定制一款工业巡检机器人。他们将该框架与具有相同基本设置的标准交互式遗传算法做了对比。增强系统将用户评估次数约减少了三分之一,主观工作负担降低了约30%,进化周期数减少了15%。参与者更快完成任务、点击更少,且专家与非专家之间的表现差距也更小。换言之,该系统不仅更快收敛到可行设计,还使无深厚技术背景的人更易上手这一过程。
这对未来智能产品意味着什么
对普通读者来说,关键结论是这项研究指向了一类表面上简单且可视化、但在内部由丰富约束检查与学习机制驱动的产品设计工具。所提框架帮助人们通过简单浏览和选择表达偏好,悄然筛除不可能的选项,然后通过演化搜索锁定既符合审美又能在现实中运行的机器人设计。同样的理念可用于许多其他对功能至关重要的产品设计,从医疗机器人到安全设备,引导我们走向一个普通用户也能参与塑造复杂机械,而无需成为工程师的未来。
引用: Zhang, Y., Zuo, H., Hu, Y. et al. An interactive genetic algorithms system customizes robot appearance via cognitive noise filtering under embodied constraints. Sci Rep 16, 11154 (2026). https://doi.org/10.1038/s41598-026-41407-4
关键词: 机器人定制, 交互式遗传算法, 具身约束, 认知噪声, 人机共设计