Clear Sky Science · sv
Ett interaktivt system med genetiska algoritmer anpassar robots utseende via kognitiv brusfiltrering under förkroppsligade begränsningar
Varför smartare robotdesign spelar roll för dig
När robotar flyttar från fabriksbottnar in i sjukhus, lager och till och med våra hem blir deras utseende mer än bara en stilfråga. Formen måste stämma överens med vad roboten gör och var den arbetar, och vanliga användare — inte bara ingenjörer — ombeds i allt högre grad att välja eller anpassa dessa designer. Denna artikel presenterar ett nytt sätt att låta användare samskapa en robots utseende samtidigt som systemet diskret säkerställer att det valda uttrycket fortfarande följer fysikens lagar och inte överbelastar användarens tålamod eller uppmärksamhet. 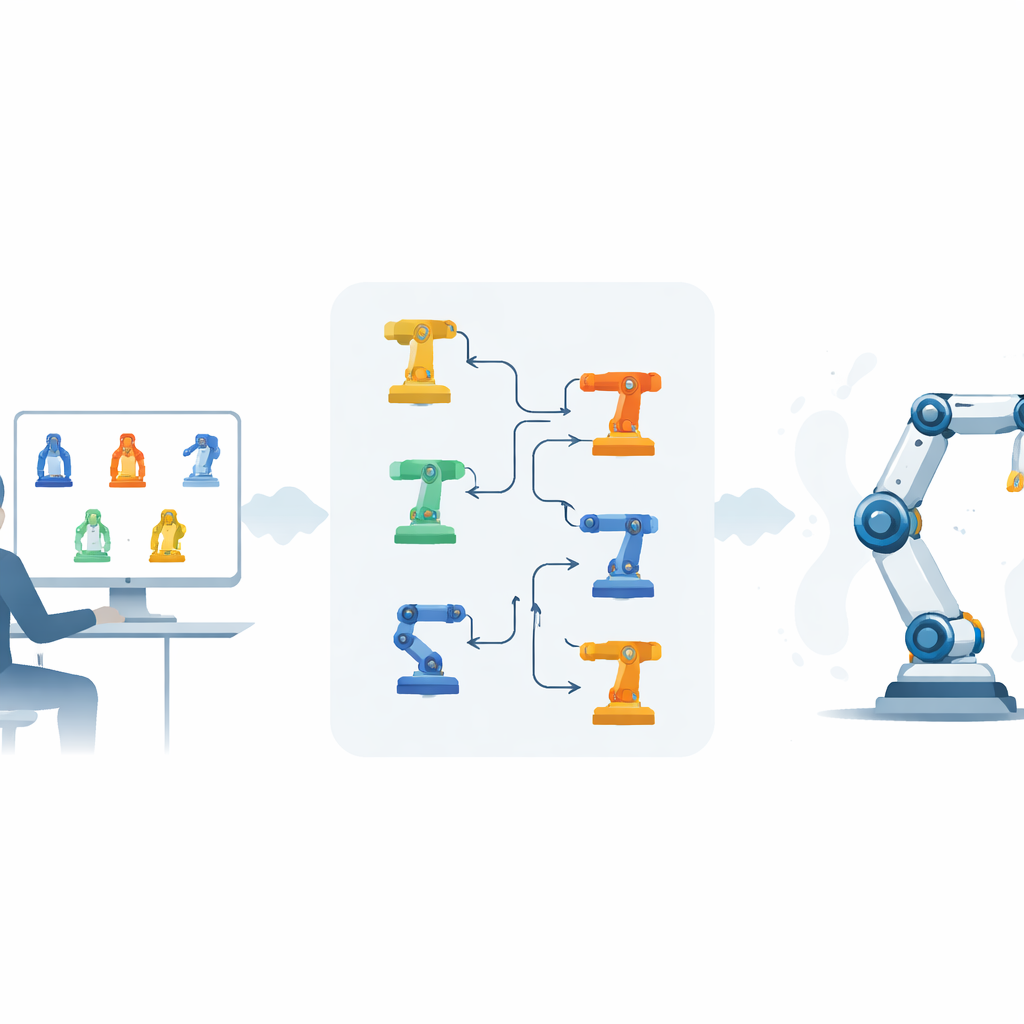
Utmaningen att välja en robots ”utseende”
Moderna företag förlitar sig på masstillverkad anpassning: du får skräddarsy en produkt, men den måste fortfarande vara ekonomisk att bygga. För robotar är detta särskilt knepigt. En användare kan vilja ha en vänligt rundad inspektionsrobot med extra utsmyckning, men dessa val kan lätt blockera sensorer, begränsa leders rörelseomfång eller göra maskinen instabil. Samtidigt har användare sällan en klar bild från början. Deras preferenser är diffusa, de blir snabbt trötta när de ombeds bedöma många alternativ, och deras omdömen kan svaja över tid. Denna blandning av oklara önskemål, mental utmattning och tekniska begränsningar förvandlar ofta robotanpassning till en frustrerande och ineffektiv process.
Att omvandla vaga idéer till tydliga val
Författarna angriper problemet med de ”vagga idéerna” genom att bygga en bro mellan ord, bilder och dolda designkoder. Istället för att be människor justera tekniska parametrar visar systemet kuraterade exempelrobotar kopplade till enkla beskrivande termer som användningsscenario, kroppskonstruktion, material eller stilistiska detaljer. Bakom varje exempel ligger en strukturerad kod som beskriver nyckelfunktioner som primär tillämpning, huvudmoduler och kroppssiluett. När en användare klickar igenom flera exempel som ”känns rätt” extraherar och kombinerar systemet deras funktionkoder till en personlig kravuppsättning. En semiotisk dekompositionsprocess — att bryta ner den övergripande designen i mindre, meningsfulla delar — håller biblioteket utbyggbart samtidigt som vaga intryck omvandlas till tydliga, maskinläsbara val.
Hålla designer fysiskt genomförbara med dolda regler
På ingenjörssidan bäddar systemet in vad författarna kallar förkroppsligade begränsningar: den täta kopplingen mellan en robots form, dess funktioner och dess miljö. Dessa begränsningar inkluderar leders rörelseomfång, strukturell hållfasthet, sensorsynfält och utrymme för tillbehör. Teamet kodar sådana regler i en kunskapsgraf och översätter dem till kompatibilitetsmatriser som automatiskt kan kontrollera om en kombination av funktioner är rimlig. Till exempel kan ett matrisbaserat rumsligt test upptäcka när en fingerspetsmanipulator skulle kollidera med ett brandslangsfäste eller när dekorativ bepansring blockerar en kameras sikt. Designer som bryter mot dessa regler filtreras bort innan användaren någonsin behöver se eller bedöma dem, vilket minskar slöseri med mentalt arbete. 
En utvecklande dialog mellan användare och algoritm
I systemets kärna finns en interaktiv genetisk algoritm, en optimeringsmetod som utvecklar en population av designkandidater över många omgångar, styrd av användarval snarare än en fast formel. Här är den initiala populationen inte helt slumpmässig; den sås med kravkoderna som erhållits från de tidigare text–bild–symbol-interaktionerna och blandas sedan med några slumpindivider för variation. Användare poängsätter inte varje design på en numerisk skala; istället väljer de helt enkelt föredragna kandidater och kan "låsa" favoritfunktioner så att de förblir oförändrade i senare omgångar. Algoritmen anpassar mutationsnivåerna baserat på hur väl designer uppfyller fysiska begränsningar och skiftar gradvis sitt fokus från strikt genomförbarhet i tidiga generationer till personlig smak i senare. Elitbevarande säkerställer att lovande designer inte går förlorade under sökningen.
Bevis för att tillvägagångssättet minskar belastningen
För att testa metoden byggde forskarna en molnbaserad industridesignplattform och bad 120 frivilliga — både designeexperter och icke-experter — att anpassa en industriell inspektionsrobot för komplexa, verkliga miljöer. De jämförde den nya ramen med en standardinteraktiv genetisk algoritm med samma grundinställningar. Det förbättrade systemet minskade användarutvärderingar med ungefär en tredjedel, sänkte subjektiv arbetsbörda med runt 30 % och kortade antalet evolutionscykler med 15 %. Deltagarna slutförde sina uppgifter snabbare, med färre klick och med mindre skillnad mellan expert- och icke-expertprestation. Med andra ord konvergerade systemet inte bara snabbare mot genomförbara designer utan gjorde processen mer tillgänglig för personer utan djup teknisk kunskap.
Vad detta betyder för framtidens smarta produkter
För lekmän är huvudbudskapet att denna forskning pekar mot produktdesignverktyg som upplevs enkla och visuella i ytan men som drivs av avancerade begränsningskontroller och lärande under huven. Den föreslagna ramen hjälper människor att uttrycka vad de gillar genom enkel bläddring och val, filtrerar tyst bort omöjliga alternativ och använder sedan en utvecklande sökning för att hitta en robotdesign som både ser rätt ut och fungerar i verkligheten. Samma idé kan vägleda designen av många andra funktionskritiska produkter, från medicinska robotar till säkerhetsutrustning, och föra oss mot en framtid där vardagsanvändare hjälper till att forma komplexa maskiner utan att behöva bli ingenjörer själva.
Citering: Zhang, Y., Zuo, H., Hu, Y. et al. An interactive genetic algorithms system customizes robot appearance via cognitive noise filtering under embodied constraints. Sci Rep 16, 11154 (2026). https://doi.org/10.1038/s41598-026-41407-4
Nyckelord: robotanpassning, interaktiva genetiska algoritmer, förkroppsligade begränsningar, kognitivt brus, människa–robot samskapande