Clear Sky Science · de
Ein interaktives System mit genetischen Algorithmen passt das Aussehen von Robotern über kognitive Rauschfilterung unter verkörperten Beschränkungen an
Warum schlauere Robotergestaltung für Sie wichtig ist
Da Roboter von Fabrikhallen in Krankenhäuser, Lagerhäuser und sogar unsere Wohnungen vordringen, ist ihr Aussehen nicht mehr nur eine Frage des Stils. Form und Gestalt müssen zu ihren Aufgaben und Einsatzorten passen, und zunehmend werden auch Laien — nicht nur Ingenieure — gebeten, diese Designs auszuwählen oder anzupassen. Dieses Paper stellt eine neue Methode vor, die Nutzer am Co‑Design des Erscheinungsbilds eines Roboters teilhaben lässt und gleichzeitig unauffällig sicherstellt, dass das gewählte Aussehen physikalischen Gesetzen folgt und die Geduld oder Aufmerksamkeit der Nutzer nicht überfordert. 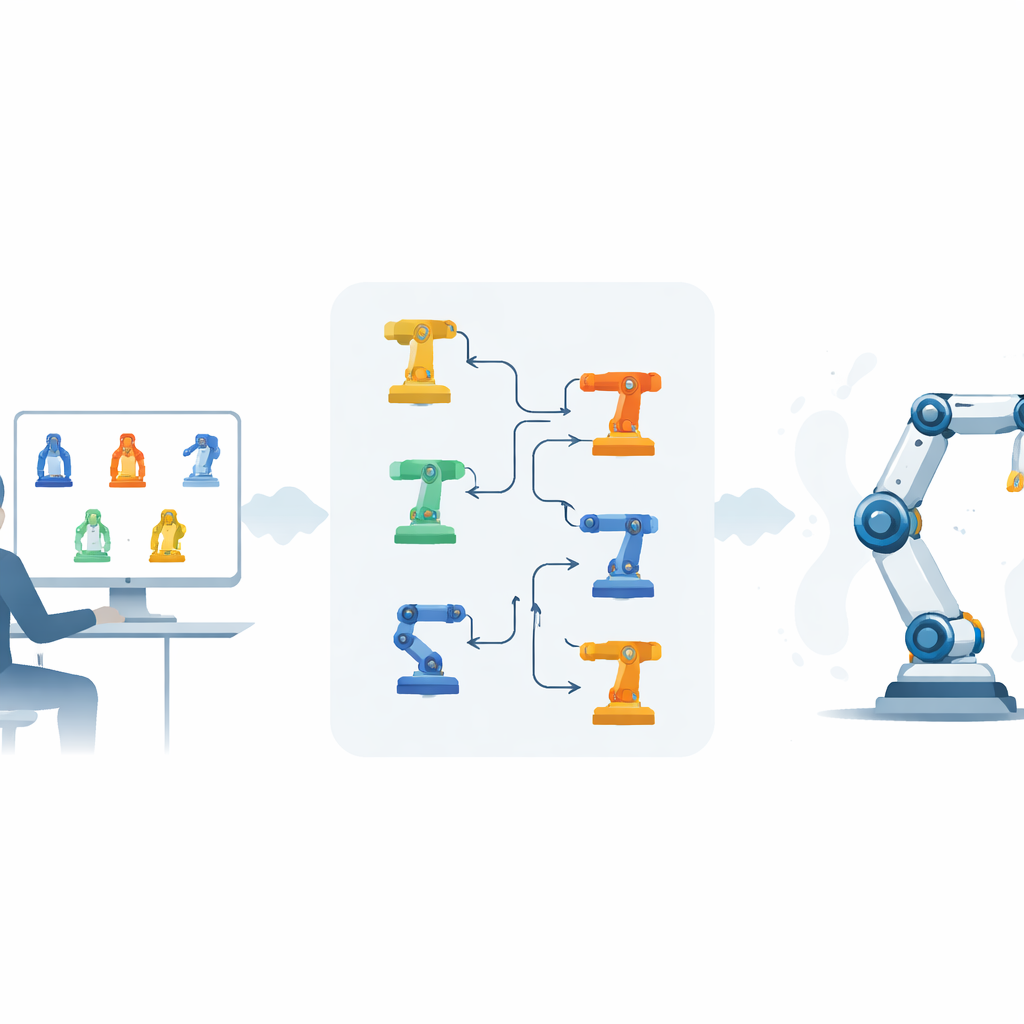
Die Herausforderung bei der Wahl eines Roboter‑„Looks“
Moderne Unternehmen setzen auf Massenanpassung: Man kann ein Produkt nach Wunsch gestalten, zugleich muss es aber noch wirtschaftlich herstellbar bleiben. Für Roboter ist das besonders heikel. Ein Nutzer kann sich einen freundlichen, abgerundeten Inspektionsroboter mit zusätzlichen Verzierungen wünschen, doch solche Entscheidungen können leicht Sensoren blockieren, Gelenkbewegungen einschränken oder die Maschine instabil machen. Zugleich haben Nutzer selten von Anfang an eine klare Vorstellung. Ihre Vorlieben sind vage, sie ermüden schnell, wenn sie viele Optionen bewerten sollen, und ihre Urteile schwanken mitunter im Zeitverlauf. Dieses Zusammenspiel aus unklaren Wünschen, geistiger Ermüdung und technischen Zwängen macht Roboteranpassung häufig zu einem frustrierenden und ineffizienten Prozess.
Vage Ideen in klare Optionen verwandeln
Die Autorinnen und Autoren begegnen der Seite „verschwommener Vorstellungen“, indem sie eine Brücke zwischen Worten, Bildern und verborgenen Designcodes bauen. Anstatt Menschen technische Parameter einstellen zu lassen, zeigt das System kuratierte Beispielroboter, die mit einfachen beschreibenden Begriffen wie Einsatzszenario, Körperstruktur, Materialien oder Stil-Details verknüpft sind. Hinter jedem Beispiel steht ein strukturierter Code, der Schlüsselfunktionen wie Haupteinsatz, zentrale Module und Körperform beschreibt. Wenn ein Nutzer mehrere Beispiele durchklickt, die „sich richtig anfühlen“, extrahiert das System deren Merkmal‑Codes und kombiniert sie zu einem persönlichen Anforderungssatz. Ein semiotischer Zerlegungsprozess — das Aufbrechen des Gesamtdesigns in kleinere, sinnvolle Teile — hält diese Bibliothek erweiterbar und verwandelt vage Eindrücke in klare, maschinenlesbare Entscheidungen.
Designs physikalisch realistisch halten mit versteckten Regeln
Auf der Ingenieursseite integriert das System das, was die Autorinnen und Autoren verkörperte Beschränkungen nennen: die enge Verbindung zwischen Form, Funktion und Umgebung eines Roboters. Diese Beschränkungen umfassen Gelenkreichweiten, strukturelle Festigkeit, Sensorsichtbarkeit und Raum für Anbauwerkzeuge. Das Team kodiert solche Regeln in einem Wissensgraphen und übersetzt sie in Kompatibilitätsmatrizen, die automatisch prüfen können, ob eine Kombination von Merkmalen Sinn ergibt. Beispielsweise erkennt ein matrixbasierter Raumtest, wenn ein geschicktes Handmodul mit einer Halterung für einen Feuerwehrschlauch kollidiert oder wenn dekorative Panzerungen die Sicht einer Kamera blockieren würden. Designs, die gegen diese Regeln verstoßen, werden herausgefiltert, bevor der Nutzer sie überhaupt zu sehen oder zu bewerten bekommt, was verschwendete geistige Anstrengung reduziert. 
Ein sich entwickelnder Dialog zwischen Nutzer und Algorithmus
Im Zentrum des Systems steht ein interaktiver genetischer Algorithmus, ein Optimierungsansatz, der eine Population von Designkandidaten über viele Runden weiterentwickelt und dabei von Nutzerwahlen statt einer festen Zielfunktion geleitet wird. Die Anfangspopulation ist hier nicht rein zufällig; sie wird mit den aus den vorherigen Text‑Bild‑Symbol‑Interaktionen gewonnenen Anforderungscodes initialisiert und dann mit einigen zufälligen Individuen für Vielfalt gemischt. Nutzer bewerten nicht jedes Design auf einer numerischen Skala; stattdessen wählen sie einfach bevorzugte Kandidaten aus und können Lieblingsmerkmale „sperren“, damit diese in späteren Runden unverändert bleiben. Der Algorithmus passt Mutationsraten danach an, wie gut Designs physikalische Beschränkungen erfüllen, und verschiebt seinen Fokus allmählich von strikter Machbarkeit in frühen Generationen hin zu persönlichem Geschmack in späteren. Durch Erhalt der Elite gehen vielversprechende Entwürfe während der Suche nicht verloren.
Belege dafür, dass der Ansatz die Belastung reduziert
Um die Methode zu testen, bauten die Forschenden eine cloudbasierte Industriedesign‑Plattform und baten 120 Freiwillige — sowohl Designexpertinnen und -experten als auch Laien — einen Industrieroboter zur Inspektion für komplexe, reale Umgebungen anzupassen. Sie verglichen das neue Framework mit einem Standard‑IGA, das dieselben Grundeinstellungen verwendete. Das erweiterte System reduzierte die Nutzerbewertungen um etwa ein Drittel, verringerte die subjektive Arbeitsbelastung um rund 30 % und kürzte die Zahl der Evolutionszyklen um 15 %. Teilnehmende schlossen ihre Aufgaben schneller ab, mit weniger Klicks und kleineren Leistungsunterschieden zwischen Expertinnen/Experten und Nicht‑Expertinnen/Nicht‑Experten. Anders gesagt: Das System konvergierte nicht nur schneller zu brauchbaren Entwürfen, sondern machte den Prozess auch für Personen ohne tiefgehende technische Kenntnisse zugänglicher.
Was das für künftige smarte Produkte bedeutet
Für nicht‑fachliche Leser ist die Kernaussage, dass diese Forschung auf Designwerkzeuge zielt, die an der Oberfläche einfach und visuell wirken, aber unter der Haube durchdachte Beschränkungsprüfungen und lernende Mechanismen einsetzen. Das vorgeschlagene Framework hilft Menschen, ihre Vorlieben über einfaches Stöbern und Auswählen auszudrücken, blendet unmögliche Optionen still aus und nutzt eine sich entwickelnde Suche, um auf einen Roboterentwurf zuzusteuern, der sowohl richtig aussieht als auch in der realen Welt funktioniert. Dieselbe Idee könnte die Gestaltung vieler anderer funktionskritischer Produkte leiten — von medizinischen Robotern bis zu Schutzgeräten — und uns in eine Zukunft führen, in der alltägliche Nutzer komplexe Maschinen mitgestalten können, ohne selbst zu Ingenieurinnen oder Ingenieuren werden zu müssen.
Zitation: Zhang, Y., Zuo, H., Hu, Y. et al. An interactive genetic algorithms system customizes robot appearance via cognitive noise filtering under embodied constraints. Sci Rep 16, 11154 (2026). https://doi.org/10.1038/s41598-026-41407-4
Schlüsselwörter: Roboter-Anpassung, interaktive genetische Algorithmen, verkörperte Beschränkungen, kognitives Rauschen, Mensch–Roboter-Co-Design