Clear Sky Science · pt
Um sistema de algoritmos genéticos interativos personaliza a aparência de robôs via filtragem de ruído cognitivo sob restrições incorporadas
Por que um design de robôs mais inteligente importa para você
À medida que robôs saem dos pisos de fábricas e entram em hospitais, armazéns e até nossas casas, sua aparência deixa de ser só uma questão de estilo. A forma precisa corresponder ao que eles fazem e onde operam, e pessoas comuns — não apenas engenheiros — estão cada vez mais convidadas a escolher ou personalizar esses designs. Este artigo apresenta uma nova maneira de permitir que usuários co-projetem a aparência de um robô enquanto, discretamente, garante que o visual escolhido ainda obedeça às leis da física e não sobrecarregue a paciência ou a atenção do usuário. 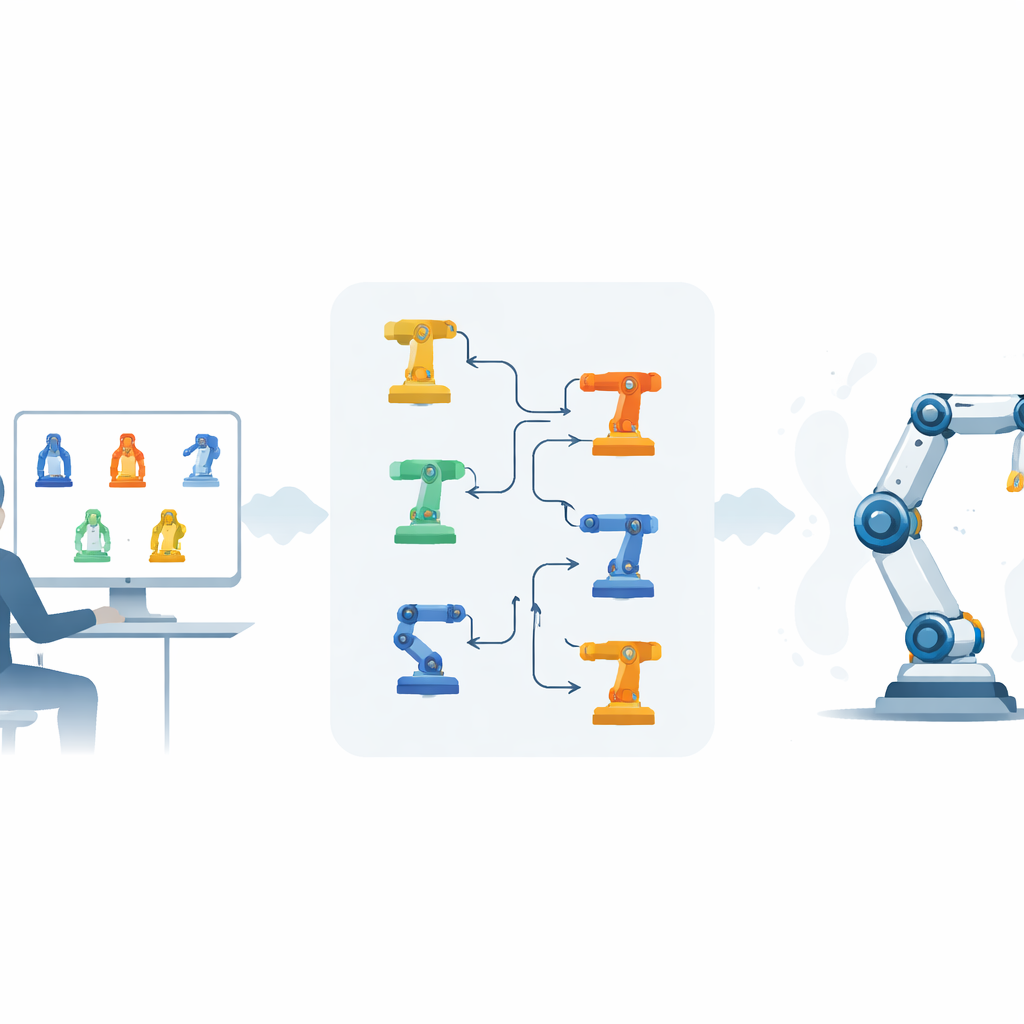
O desafio de escolher a “cara” de um robô
Empresas modernas dependem da customização em massa: você pode ajustar um produto, mas ele ainda precisa ser viável economicamente. Para robôs, isso é especialmente complicado. Um usuário pode querer um robô de inspeção amigável e arredondado com enfeites extras, mas essas escolhas podem facilmente bloquear sensores, restringir o movimento de juntas ou tornar a máquina instável. Ao mesmo tempo, os usuários raramente têm uma imagem clara na cabeça desde o início. Seus gostos são vagos, eles se cansam rápido quando solicitados a avaliar muitas opções e seus julgamentos podem oscilar de um momento para outro. Essa mistura de desejos imprecisos, fadiga mental e limites de engenharia costuma transformar a customização de robôs em um processo frustrante e ineficiente.
Transformando ideias vagas em opções claras
Os autores enfrentam o lado das “ideias vagas” construindo uma ponte entre palavras, imagens e códigos de design ocultos. Em vez de pedir que as pessoas ajustem parâmetros técnicos, o sistema mostra robôs exemplares selecionados vinculados a termos descritivos simples, como cenário de uso, estrutura do corpo, materiais ou detalhes de estilo. Por trás de cada exemplo existe um código estruturado que descreve características-chave, como aplicação principal, módulos essenciais e formato do corpo. Quando um usuário clica em vários exemplos que “caem bem”, o sistema extrai e combina seus códigos de características em um conjunto de requisitos pessoal. Um processo de decomposição semiótica — quebrar o design geral em partes menores e significativas — mantém essa biblioteca expansível enquanto converte impressões vagas em escolhas claras e legíveis por máquina.
Manter os designs fisicamente reais com regras ocultas
No lado de engenharia, o sistema incorpora o que os autores chamam de restrições incorporadas: o vínculo estreito entre a forma do robô, suas funções e seu ambiente. Essas restrições incluem amplitudes de junta, resistência estrutural, visibilidade dos sensores e espaço para ferramentas adicionais. A equipe codifica tais regras em um grafo de conhecimento e as traduz em matrizes de compatibilidade que podem verificar automaticamente se uma combinação de características faz sentido. Por exemplo, um teste espacial baseado em matrizes pode detectar quando um módulo de mão dexterous colidiria com um suporte para mangueira de incêndio ou quando uma cobertura decorativa bloquearia a visão de uma câmera. Designs que violam essas regras são filtrados antes mesmo de o usuário vê-los ou avaliá-los, reduzindo o esforço mental desperdiçado. 
Uma conversa em evolução entre usuário e algoritmo
No centro do sistema está um algoritmo genético interativo, uma abordagem de otimização que faz evoluir uma população de candidatos a design ao longo de várias rodadas, guiada pelas escolhas do usuário em vez de uma fórmula fixa. Aqui, a população inicial não é puramente aleatória; ela é semeada com os códigos de requisitos obtidos das interações texto–imagem–símbolo anteriores e então misturada com alguns indivíduos aleatórios para variedade. Os usuários não pontuam cada design em uma escala numérica; em vez disso, simplesmente escolhem candidatos preferidos e podem “travar” características favoritas para que permaneçam inalteradas em rodadas posteriores. O algoritmo ajusta as taxas de mutação com base em quão bem os designs satisfazem as restrições físicas e desloca gradualmente seu foco da viabilidade estrita nas primeiras gerações para o gosto pessoal nas seguintes. A preservação de elites garante que designs promissores não se percam à medida que a busca continua.
Prova de que a abordagem reduz a carga
Para testar o método, os pesquisadores construíram uma plataforma de design industrial em nuvem e convidaram 120 voluntários — tanto especialistas em design quanto não especialistas — para personalizar um robô de inspeção industrial para ambientes complexos do mundo real. Eles compararam o novo framework com um algoritmo genético interativo padrão com as mesmas configurações básicas. O sistema aprimorado reduziu as avaliações dos usuários em cerca de um terço, diminuiu a carga de trabalho subjetiva em aproximadamente 30% e cortou o número de ciclos de evolução em 15%. Os participantes finalizaram suas tarefas mais rapidamente, com menos cliques e com menor diferença entre o desempenho de especialistas e não especialistas. Em outras palavras, o sistema não apenas convergiu mais rápido para designs viáveis, mas também tornou o processo mais acessível a pessoas sem conhecimento técnico profundo.
O que isso significa para produtos inteligentes no futuro
Para leitores leigos, a principal conclusão é que esta pesquisa aponta para ferramentas de design de produtos que parecem simples e visuais na superfície, mas são alimentadas por verificações ricas de restrições e aprendizado por trás dos panos. O framework proposto ajuda as pessoas a expressarem o que gostam por meio de navegação e seleção fáceis, filtra discretamente opções impossíveis e então usa uma busca evolutiva para convergir num design de robô que tanto parece certo quanto funciona no mundo real. A mesma ideia poderia orientar o design de muitos outros produtos críticos em função, de robôs médicos a equipamentos de segurança, nos movendo para um futuro em que usuários comuns ajudam a moldar máquinas complexas sem precisar se tornar engenheiros.
Citação: Zhang, Y., Zuo, H., Hu, Y. et al. An interactive genetic algorithms system customizes robot appearance via cognitive noise filtering under embodied constraints. Sci Rep 16, 11154 (2026). https://doi.org/10.1038/s41598-026-41407-4
Palavras-chave: personalização de robôs, algoritmos genéticos interativos, restrições incorporadas, ruído cognitivo, co-design humano–robô