Clear Sky Science · zh
ULTRA-MoCap:用于上肢关节运动学分析的多模态 IMU 与表面肌电(sEMG)数据集
为什么追踪日常手臂运动很重要
每次你伸手拿东西、走路时甩臂或提包,肩关节、肘关节和腕关节都在进行精确协调的动作。深入理解这些运动可以改变物理康复、运动训练以及我们如何控制辅助机器人或外骨骼。然而,目前关于手臂运动的大多数数据要么来自专门实验室中体积庞大的摄像机系统,要么来自只能捕捉身体部分信息的可穿戴设备。本文介绍了 ULTRA-MoCap,这是一个将这些信息整合在一起的新开放数据集,结合了动作捕捉摄像头、小型运动传感器和肌肉活动记录,为上肢运动提供了更丰富的视角。
将多种传感世界整合在一起
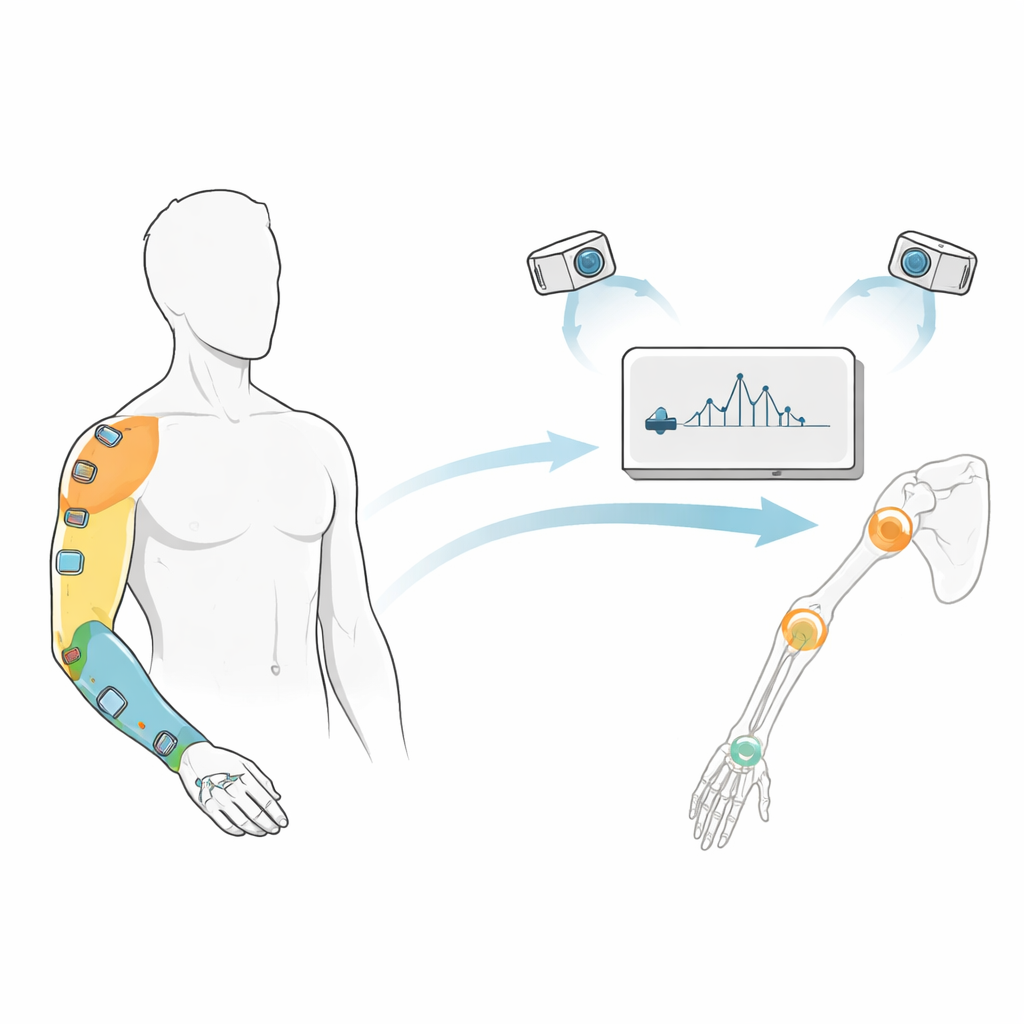
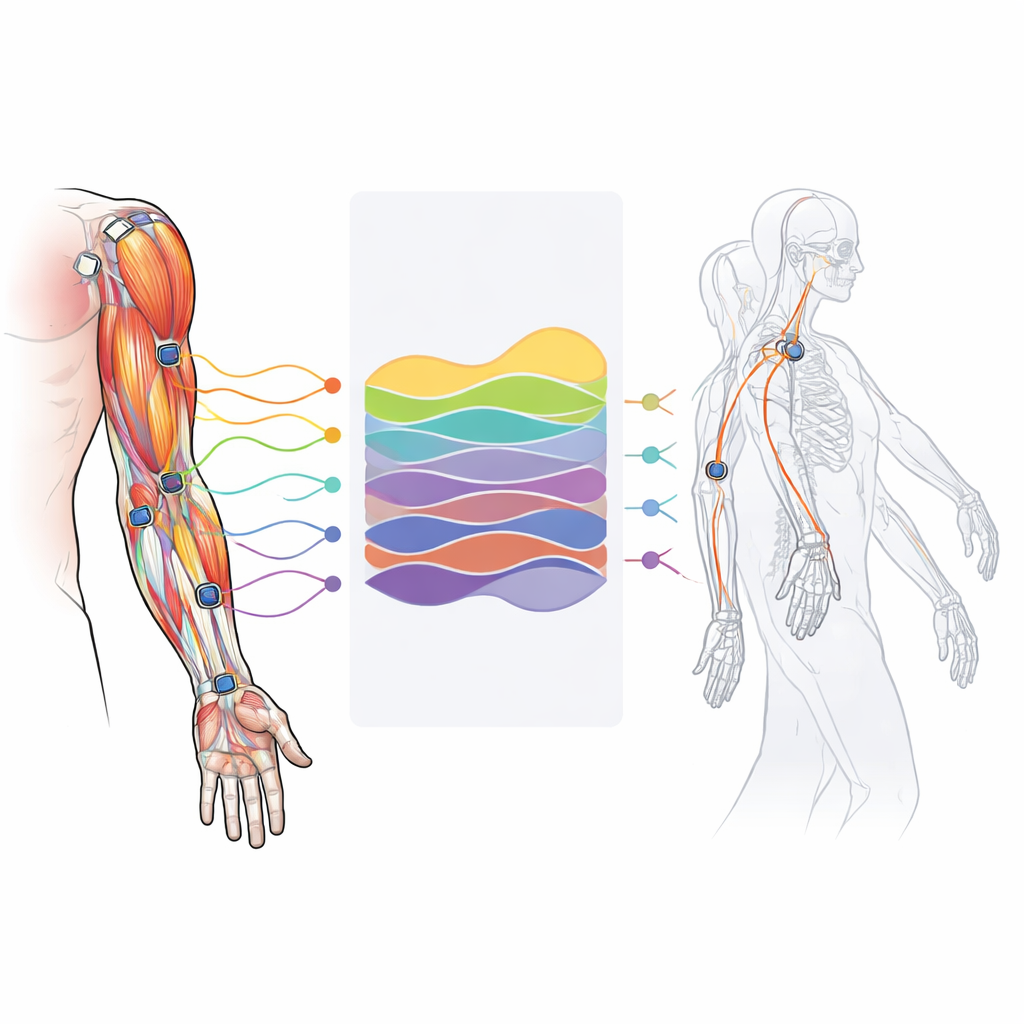
大多数关于手臂运动的研究只依赖一个身体的观察窗口:要么关注关节如何运动,要么关注肌肉如何放电,要么关注肢体如何在空间中加速。ULTRA-MoCap 的独特之处在于同时记录这三种信号。它同步了高端摄像机动作捕捉系统与六个小型惯性测量单元(IMU),这些 IMU 分别记录手、腕、前臂和上臂的运动,此外还配备表面肌电(sEMG)传感器,测量二头肌、三头肌和三角肌等关键肌肉的电活动。这种组合让研究者能够观察肌肉活动、肢体运动与关节角度如何在时间上对齐,从而提供上半身运动的详细动态画像。
如何从真实人群收集数据
该数据集基于对十三名健康成人的实验构建,受试者在参与前经过仔细筛查以排除既往的手臂或肩部损伤。参与者在动作捕捉时佩戴了六十个反光标记,并在右臂上安置了六个无线传感单元。他们执行了五种常见的上肢动作:双臂摆动、横跨躯干的伸手动作、反复弯曲与伸直肘部、肩部旋转以及将手臂抬到不同高度的举臂动作。每次试验持续三十秒,速度由参与者自选,范围从慢到很快,并在动作间安排休息以避免疲劳对肌电信号产生干扰。结果是包含多样动作且保持清晰可重复模式的数据,类似于自然的日常活动。
从原始标记到虚拟关节
为了将摄像机捕获的标记云转换为有意义的关节角度,作者使用了一个详细的上半身计算模型,该模型像虚拟骨骼一样表示骨骼和关节。首先使用一个校准姿势将该模型“缩放”以适应每个人的体型,然后运行逆运动学过程,在每一时刻寻找与观测到的标记轨迹最一致的关节位置和角度。通过仔细的质量检查,确保虚拟标记与真实标记保持在几厘米范围内,并且计算出的肩、肘和腕的运动在数千帧上表现出符合解剖学的合理性。最终数据集同时包含这些处理后的关节角度以及原始传感器和标记记录,所有文件以一致的命名和格式组织,便于他人重复使用。
用机器学习测试数据质量
为了展示这些信号不仅干净且富有信息,作者训练了一个深度学习模型,仅基于短时的两秒传感器数据片段来识别正在执行的五种动作中的哪一种。仅使用 IMU 运动数据时,该模型的识别准确率超过 94%,当 IMU 与肌电信号结合时性能略有提高。仅用肌电数据跨不同个体的泛化更困难,反映出个体在招募肌肉方面的自然差异,但在模型个性化到单个受试者时表现非常好。这些结果表明 ULTRA-MoCap 既适合需要对新用户工作的通用算法,也适用于适应单个个体的个性化系统。
这个资源对未来意味着什么
通俗地说,ULTRA-MoCap 就像为手臂安装了一个富有设备的“黑匣子记录仪”,记录骨骼、肌肉和可穿戴传感器在现实运动中的协同表现。由于数据集和支持代码是公开可得的,研究者可以利用它来设计更智能的康复训练、改进机器人外骨骼的控制、优化虚拟现实交互,或探索如何用更少或更简单的传感器实现更多功能。研究总结认为,这种多层次的上肢运动视角填补了现有资源的关键空白,应能加速面向自然、直观理解与辅助手臂运动的可穿戴技术的发展。
引用: Fritsche, O., Camacho, S., Hossain, M.S.B. et al. ULTRA-MoCap: A Multimodal IMU and sEMG Dataset for Upper Body Joint Kinematics Analysis. Sci Data 13, 622 (2026). https://doi.org/10.1038/s41597-026-06687-5
关键词: 上肢运动, 可穿戴传感器, 肌电图, 动作捕捉数据集, 康复技术