Clear Sky Science · nl
ULTRA-MoCap: Een multimodaal IMU- en sEMG-dataset voor analyse van bovenste ledemaat kinematica
Waarom het volgen van alledaagse armbewegingen ertoe doet
Elke keer dat u naar een plank reikt, uw armen laat zwaaien tijdens het lopen of een tas optilt, voeren uw schouder, elleboog en pols een precies gecoördineerde beweging uit. Het gedetailleerd begrijpen van deze beweging kan de fysiotherapie, sporttraining en de aansturing van assistieve robots of exoskeletten fundamenteel veranderen. De meeste bestaande gegevens over armbeweging komen echter uit omvangrijke camerasystemen in gespecialiseerde laboratoria of uit draagbare sensoren die slechts een deel van het lichaamsgedrag vastleggen. Dit artikel introduceert ULTRA-MoCap, een nieuwe open dataset die deze elementen samenbrengt: motion-capture camera’s, kleine bewegingssensoren en spieractiviteitsmetingen, om een rijker beeld te geven van hoe de bovenste extremiteit beweegt.
Meerdere sensortechnologieën gecombineerd
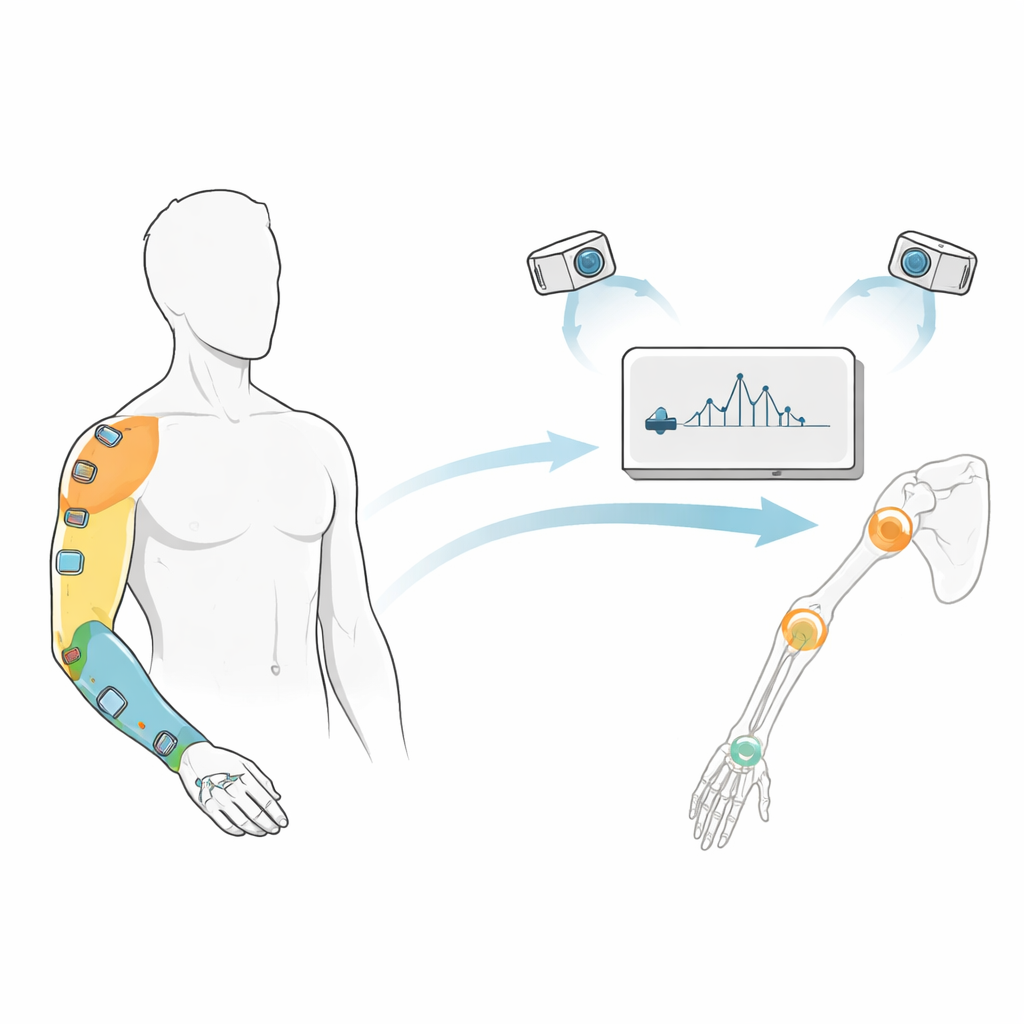
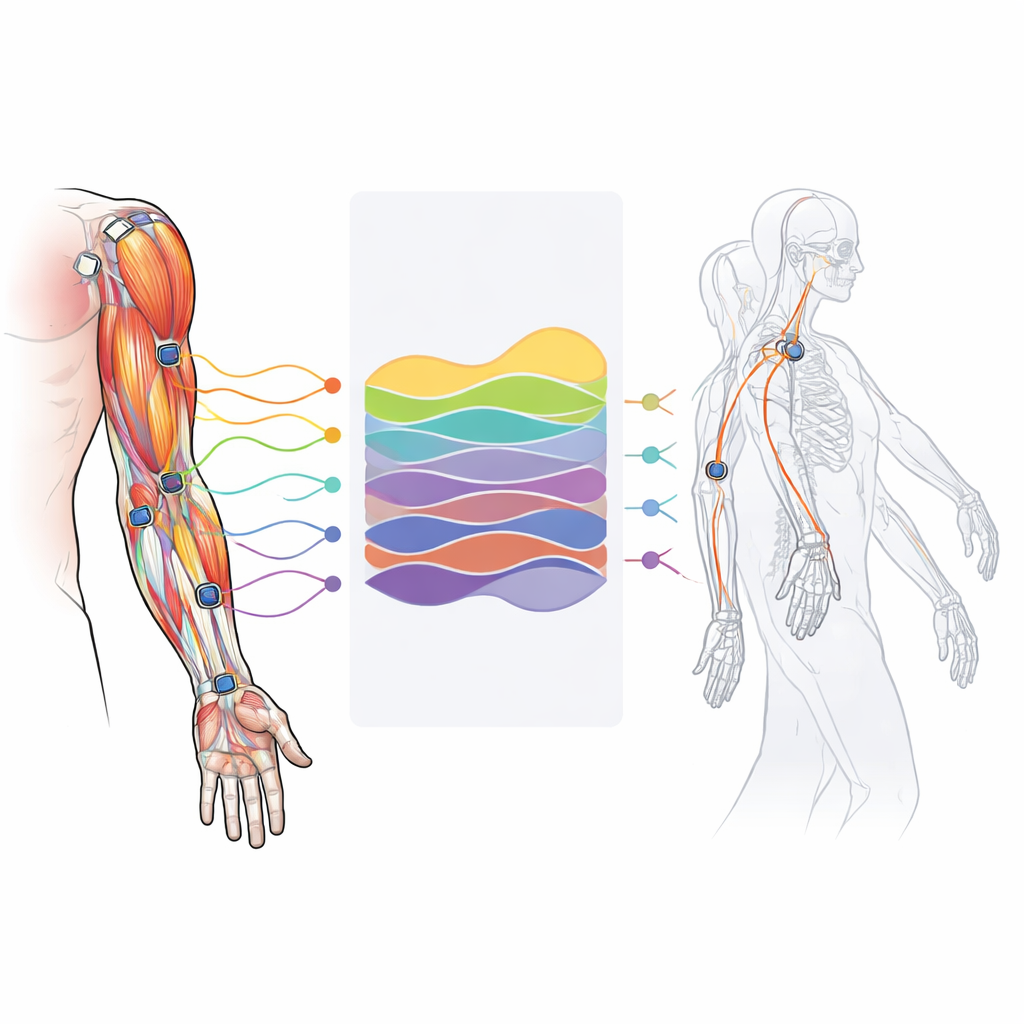
De meeste studies naar armbeweging vertrouwen op slechts één inkijkje in het lichaam: óf hoe gewrichten bewegen, óf hoe spieren vuren, óf hoe de ledemaat door de ruimte versnelt. ULTRA-MoCap onderscheidt zich doordat het alle drie gelijktijdig registreert. Het synchroniseert een geavanceerd camera-gebaseerd motion-capture systeem met zes kleine inertiële meetsensoren (IMU’s) die beweging bij hand, pols, onderarm en bovenarm volgen, plus oppervlakte-elektromyografie (sEMG) sensoren die elektrische activiteit in belangrijke spieren zoals biceps, triceps en deltoideus meten. Deze combinatie maakt het mogelijk om te zien hoe spieractiviteit, ledemaatbeweging en gewrichtshoeken in de tijd op elkaar aansluiten, en levert een gedetailleerd, dynamisch portret van bovenlichaamsbewegingen.
Hoe de data van echte mensen werden verzameld
De dataset is opgebouwd uit experimenten met dertien gezonde volwassenen, elk zorgvuldig geselecteerd om bestaande arm- of schouderblessures uit te sluiten. De deelnemers droegen zestig reflecterende markers voor motion capture en zes draadloze sensoreenheden op hun rechterarm. Ze voerden vijf veelvoorkomende bovenste ledemaatoefeningen uit: beide armen laten zwaaien, over het lichaam reiken, herhaaldelijk de ellebogen buigen en strekken, de schouders roteren, en de armen boven het hoofd heffen naar verschillende hoogtes. Elke proef duurde dertig seconden op zelfgekozen snelheden variërend van langzaam tot zeer snel, met rustpauzes om vermoeidheid te vermijden die de spiersignalen zou kunnen vertekenen. Het resultaat is een grote variatie aan bewegingen die toch duidelijke, herhaalbare patronen volgen, vergelijkbaar met natuurlijke dagelijkse activiteiten.
Van ruwe markers naar virtuele gewrichten
Om wolken van cameramarkers om te zetten in betekenisvolle gewrichtshoeken, gebruikten de auteurs een gedetailleerd computermodel van het bovenlichaam dat botten en gewrichten voorstelt als een virtueel skelet. Ze schaalden dit model eerst op maat van ieders lichaamsafmetingen met behulp van een kalibratiehouding, en voerden vervolgens een inverse-kinematica proces uit dat de gewrichtsposities en -hoeken vindt die het beste overeenkomen met de waargenomen markerbanen op elk moment. Zorgvuldige kwaliteitscontroles zorgden ervoor dat de virtuele markers binnen enkele centimeters van de echte markers bleven en dat de berekende schouder-, elleboog- en polsbewegingen anatomisch aannemelijk waren over duizenden frames. De uiteindelijke dataset bevat zowel deze verwerkte gewrichtshoeken als de oorspronkelijke sensor- en markeropnames, allemaal georganiseerd met consistente bestandsnamen en formaten zodat anderen ze eenvoudig kunnen hergebruiken.
Het testen van datakwaliteit met machine learning
Om aan te tonen dat de signalen niet alleen schoon maar ook informatief zijn, trainden de auteurs een deep-learningmodel om te herkennen welke van de vijf oefeningen werd uitgevoerd, uitsluitend op basis van korte, tweeseconde fragmenten van sensordata. Met alleen IMU-bewegingsgegevens identificeerde het model de oefening in meer dan 94 procent van de gevallen correct, en de prestaties stegen iets wanneer IMU- en spiersignalen werden gecombineerd. Spiergegevens alleen bleken moeilijker te generaliseren tussen verschillende mensen, wat de natuurlijke variatie weerspiegelt in hoe individuen hun spieren inzetten, maar werkten buitengewoon goed wanneer het model gepersonaliseerd was voor één proefpersoon. Deze resultaten suggereren dat ULTRA-MoCap goed geschikt is voor zowel algemene algoritmen die op nieuwe gebruikers moeten werken als gepersonaliseerde systemen die zich aan één individu aanpassen.
Wat deze bron betekent voor de toekomst
In alledaagse bewoordingen is ULTRA-MoCap vergelijkbaar met een rijk uitgerust "zwart doos"-recorder voor de arm, die vastlegt hoe botten, spieren en draagbare sensoren samen gedrag vertonen tijdens realistische bewegingen. Omdat de dataset en ondersteunende code publiek beschikbaar zijn, kunnen onderzoekers deze gebruiken om slimmere revalidatie-oefeningen te ontwerpen, de aansturing van robotische exoskeletten te verbeteren, interacties in virtual reality te verfijnen of te onderzoeken hoe meer bereikt kan worden met minder of eenvoudigere sensoren. De studie concludeert dat deze meerlagige blik op beweging van de bovenste ledemaat een belangrijk gat in bestaande bronnen opvult en de vooruitgang naar draagbare technologieën die onze armbewegingen op natuurlijke, intuïtieve wijze begrijpen en ondersteunen, zou moeten versnellen.
Bronvermelding: Fritsche, O., Camacho, S., Hossain, M.S.B. et al. ULTRA-MoCap: A Multimodal IMU and sEMG Dataset for Upper Body Joint Kinematics Analysis. Sci Data 13, 622 (2026). https://doi.org/10.1038/s41597-026-06687-5
Trefwoorden: beweging van de bovenste ledemaat, draagbare sensoren, elektromyografie, motion-capture dataset, revalidatietechnologie