Clear Sky Science · tr
Geri dönüş araçlarının kararlılık karakterizasyonu için uyarlanabilir Bayesçi öğrenme
Neden dönen uzay araçlarının dengede kalması önemli
Bir kapsül bir gezegenin atmosferinden geri inerken, onun yalpalanma ve sallanma biçimindeki küçük değişiklikler sorunsuz bir inişle tehlikeli bir takla arasındaki farkı yaratabilir. Oysa bu davranışı tahmin etmek için gereken ayrıntılı veriler nadir ve üretmeleri son derece pahalıdır. Bu makale, sınırlı sayıda bilgisayar simülasyonundan yola çıkarak geri dönüş araçlarının nasıl kararlı kaldığını ve mühendislerin bu tahminlere ne kadar güvenebileceğini öğrenmenin yeni bir yolunu sunuyor. Çalışma ayrıca, yeni bilgiler geldikçe güncellenen uzay aracının sanal kopyaları olan daha güvenilir dijital ikizlere de işaret ediyor.
Kapsüllerin yalpalamasına ne sebep olur
Keskin olmayan bir kapsül havada dalış yaparken, yüzeyine etki eden kuvvetler onu bir şamandıra gibi öne arkaya doğru eğip kaldırır. Bu hareketi iki temel unsur kontrol eder: kapsülü tekrar akış yönüne döndürmeye çalışan bir geri getirme etkisi ve salınımlarını ya sönümlendiren ya da güçlendiren bir sönümleme etkisi. Mühendisler bu davranışları, aracın hızı ve havayla karşılaştığı açıya bağlı olan kararlılık katsayılarıyla özetler. Şok dalgalarının, türbülanslı arkelerin ve esnek yapılarının etkileştiği geçiş ve düşük-süpersonik rejimlerde bu katsayılar doğrudan ölçülmesi zor, karmaşık biçimlerde değişir.
Geleneksel testlerin neden yetersiz kaldığı
Klasik araçlar—rüzgar tünelleri, balistik atış denemeleri ve tam 3B akışkan simülasyonları—her biri yalnızca resmin bir bölümünü sunar. Rüzgar tünelleri ölçekli modellerin etrafındaki akışı bozabilir, atış testleri yalnızca seyir verileri sağlar ve yüksek doğruluklu simülasyonlar o kadar maliyetlidir ki yalnızca birkaç vaka çalışılabilir. Geçmiş yöntemler genellikle bu dağınık veri noktalarına basit eğriler uydururken, çoğunlukla tek bir en iyi tahmin verirler ve belirsizliğin net bir resmini sunmazlar. Bu, mühendislerin örneklenen açılar arasındaki önemli eğilimleri kaçırabilecek kararlılık eğrileriyle kalmalarına ve hangi ek verinin güveni en çok artıracağını göstermeyen sınırlı rehberliğe yol açar.
Boşlukları dolduran bir öğrenme döngüsü
Yazarlar, bilinmeyen kararlılık davranışını birkaç izole sayı yerine düzgün ama belirsiz bir fonksiyon olarak ele alan uyarlanabilir bir Bayesçi çerçeve öneriyor. Önce, ses hızının hemen üzerindeki birkaç hızda serbestçe yalpalayan bir Genesis örnek-iade kapsülünü simüle ediyorlar. Basitleştirilmiş bir yalpalama hareketi denklemi, zaman içindeki hücum açısını bilinmeyen geri getirme ve sönümleme terimlerine bağlıyor. Küresel bir arama algoritması ile Bayesçi örneklemenin birleşimi, yöntemin birkaç kilit açıda bu terimlerin hangi değerlerinin simüle edilen hareketi en iyi şekilde yeniden ürettiğini ve gürültü ile modelleme sınırları göz önüne alındığında hangi değer aralıklarının hâlâ makul olduğunu bulmasını sağlıyor.
Bir yedeğe nerelere bakacağını öğretmek
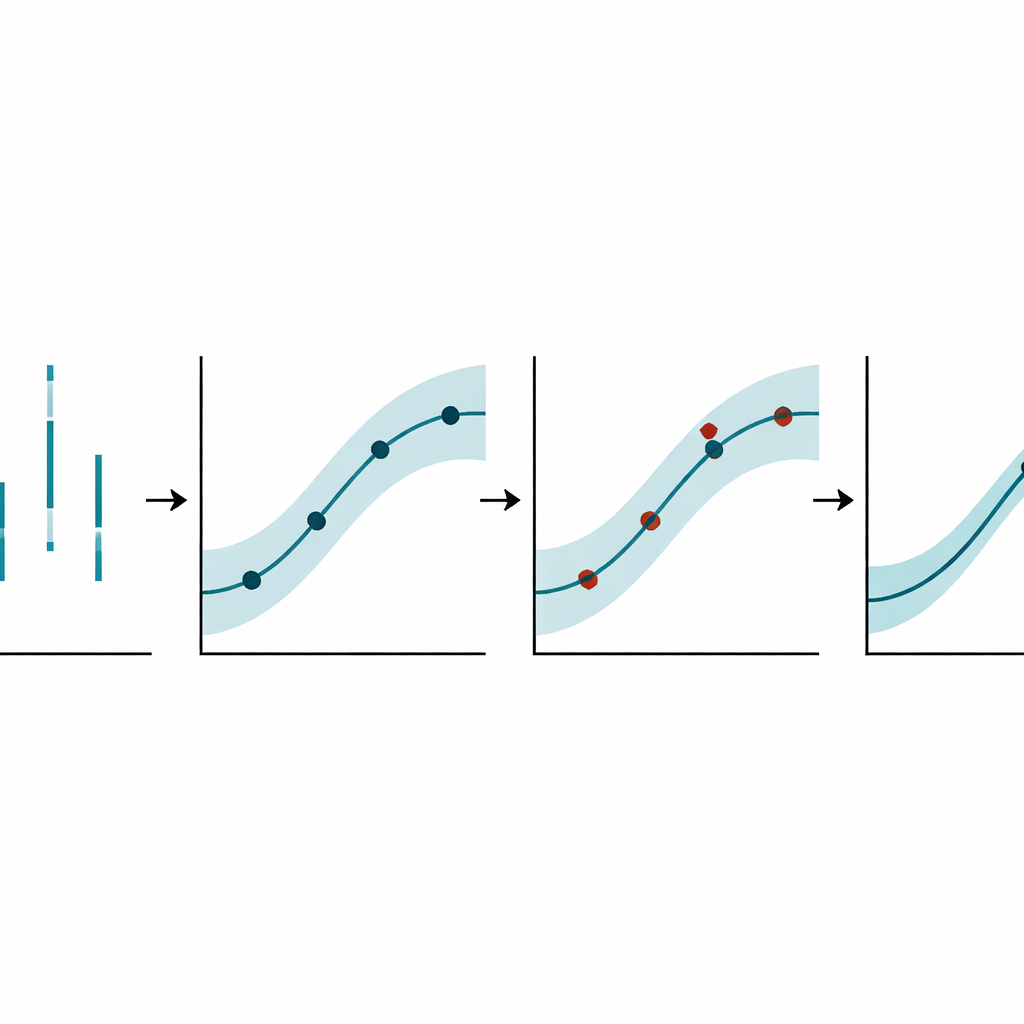
Ardından ekip, kararlılık davranışını sürekli bir açı aralığı boyunca tahmin eden ve her tahmin etrafında belirsizlik bandı taşıyan esnek istatistiksel bir eğri olan bir yedek model (surrogate) kuruyor. Bilinmeyen fonksiyonları yerleşik güven tahminleriyle modellemek için yaygın kullanılan bir araç olan Gauss sürecini kullanıyorlar. Kritik olarak, açılar eşit aralıklarla örneklenmiyor. Bunun yerine uyarlanabilir bir kural, yedeğin hem belirsiz olduğu hem de güçlü bir tepki öngördüğü açı ve Mach sayısı kombinasyonlarını tarıyor. Bu umut vadeden noktalarda yerel bir Bayesçi tersine çözüm yeniden çalıştırılıyor, yeni ve daha doğru tahminler eğitim setine ekleniyor ve yedek güncelleniyor. Bu döngü, açı aralığı boyunca belirsizlik dengeye gelene dek devam ediyor.
Yöntemin kapsül davranışı hakkında açığa çıkardıkları
Genesis kapsülüne Mach sayıları 1.10 ile 1.50 arasında uygulandığında, yaklaşım kararlı ve fiziksel olarak mantıklı eğilimler ortaya çıkarıyor. Geri getirme katsayısı test edilen açılar boyunca tutarlı biçimde negatif kalarak kapsülün doğal olarak kendini dik tutmaya çalıştığını gösteriyor ve hız arttıkça yalnızca hafif değişiklikler görünüyor. Sönümleme davranışı daha dramatik: çok küçük açılarda hareket kısa süreli büyüme gösterebilir, ardından daha yüksek açılarda ve daha yüksek Mach sayılarında şoklar ve türbülanslı arkeler salınımlardan enerjiyi çektiği için güçlü biçimde sönümleniyor. Uyarlanabilir öğrenme süreci bu eğrilerde epistemik (bilgiye dayalı) belirsizliği yarıdan fazla azaltıyor ve ortaya çıkan fonksiyonlar hareket denklemine tekrar beslenince, eğitim ve ayırılmış test vakaları için orijinal simülasyon yörüngelerini yaklaşık bir derece hassasiyetle yeniden üretebiliyor.
Geleceğin dijital ikizleri için bunun anlamı
Günlük ifadeyle, yazarlar birkaç pahalı, yüksek ayrıntılı simülasyonu alıp geri dönüş kapsülünün dengesini nasıl koruduğuna dair güvenilir, sürekli bir resme nasıl dönüştüreceklerini ve bilginin güçlü ya da zayıf olduğu yerleri gösteren dürüst hata bantlarını nasıl elde edeceklerini gösteriyor. Bu tür uyarlanabilir, belirsizlik farkındalıklı yedek modeller, sürekli olarak büyük simülasyonları yeniden çalıştırmadan hızlı ve güvenlik açısından kritik tahminler yapmak zorunda olan uzay aracının dijital ikizleri için temel yapı taşlarından biridir. Ek verinin en değerli olduğu yerleri öğrenerek ve her tahminde güveni nicelendirerek çerçeve, mühendislerin daha sağlam geri dönüş sistemleri tasarlamasına yardımcı oluyor ve gerçek araçları güvenle yönlendirebilecek sanal ikizlerin yolunu açıyor.
Atıf: Tiwari, B., Musharrat, L., Romeo, S.A.S. et al. Adaptive Bayesian learning for stability characterization of re-entry vehicles. Sci Rep 16, 10267 (2026). https://doi.org/10.1038/s41598-026-40068-7
Anahtar kelimeler: geri dönüş araçları, aerodinamik kararlılık, Bayesçi öğrenme, dijital ikizler, Gauss süreç yedeği