Clear Sky Science · sv
Adaptiv bayesiansk inlärning för karaktärisering av stabilitet hos återinträdesfordon
Varför det är viktigt att återvändande rymdfarkoster håller sig stadiga
När en kapsel rusar tillbaka genom en planets atmosfär kan små förändringar i hur den tippar och gungar avgöra om landningen blir mjuk eller blir till en farlig kullerbytta. Samtidigt är de detaljerade data som krävs för att förutsäga detta beteende sällsynta och extremt dyra att framställa. Denna artikel presenterar ett nytt sätt att, utifrån begränsade datorsimuleringar, lära sig hur återinträdesfordon förblir stabila och hur säkra ingenjörer kan vara i dessa prediktioner. Arbetet pekar också mot mer pålitliga digitala tvillingar — virtuella kopior av rymdfarkoster som uppdateras när ny information kommer in.
Hur återinträdeskapslar börjar gunga
När en trubbig kapsel dyker genom luften får krafterna på dess yta den att pitcha upp och ner, ungefär som en bobbande boj. Två huvudingredienser styr denna rörelse: en återställande effekt som försöker rikta kapseln tillbaka in i flödet, och en dämpande effekt som antingen dämpar eller förstärker svängningarna. Ingenjörer sammanfattar dessa beteenden med stabilitetskoefficienter, som beror på hur snabbt fordonet rör sig och i vilken vinkel det möter luften. I de svårhanterliga transoniska och lågsupersoniska regionerna — där chockvågor, turbulenta vakar och flexibla strukturer samspelar — varierar dessa koefficienter på komplexa sätt som är svåra att mäta direkt.
Varför traditionella tester inte räcker till
Klassiska verktyg — vindtunnlar, ballistiska avfyrningar och fullskaliga 3D-fluidberäkningar — ger alla bara en del av bilden. Vindtunnlar kan snedvrida flödet kring skalade modeller, fälttester ger endast glesa banadata, och högupplösta simuleringar är så kostsamma att endast ett fåtal fall kan köras. Tidigare metoder anpassar ofta enkla kurvor genom dessa spridda datapunkter, men levererar vanligtvis bara en enda bästa gissning utan en tydlig bild av osäkerheten. Det lämnar ingenjörerna med stabilitetskurvor som kan missa viktiga trender mellan provade vinklar och ger litet stöd för var extra data skulle förbättra förtroendet mest.
En inlärningsloop som fyller i luckorna
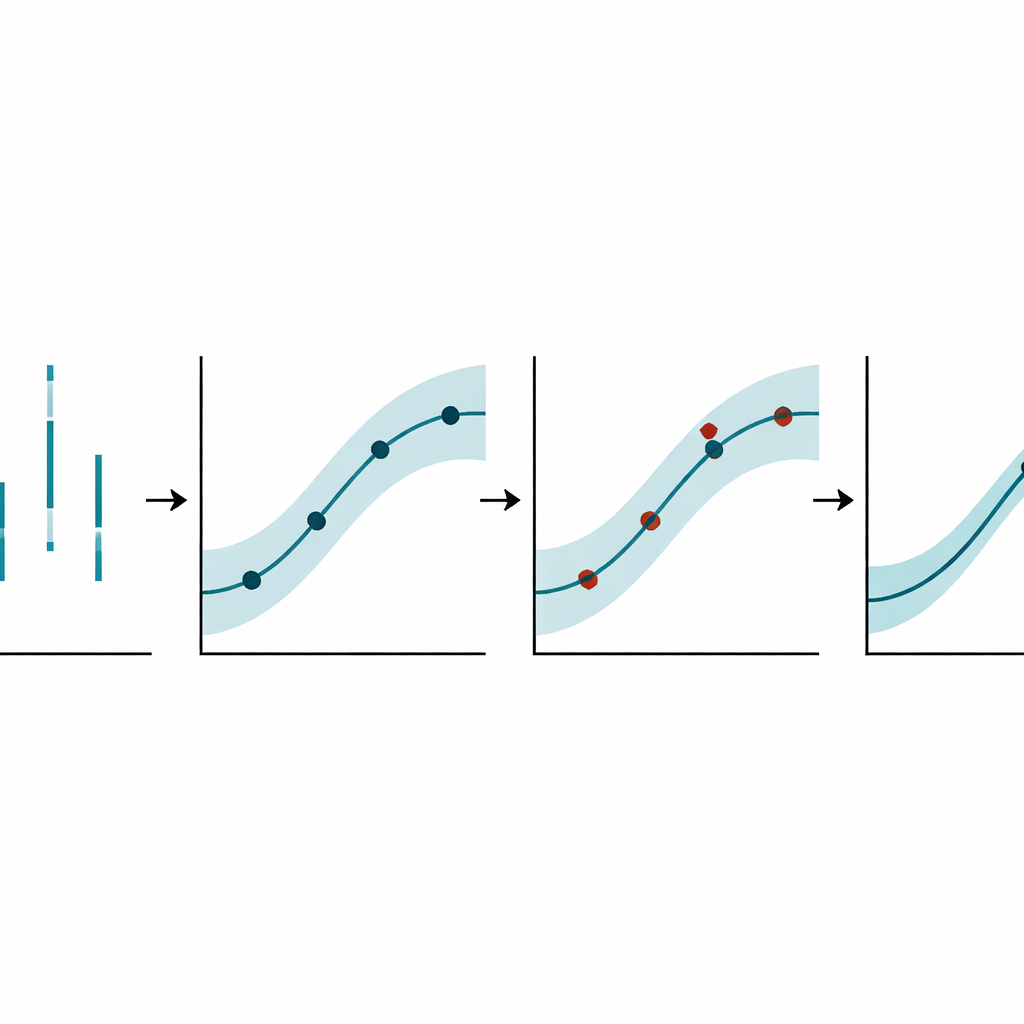
Författarna föreslår ett adaptivt bayesianskt ramverk som behandlar det okända stabilitetsbeteendet som en slät men osäker funktion snarare än ett fåtal isolerade tal. Först simulerar de hur en Genesis-provåterföringskapsel pitchar fritt vid flera hastigheter strax över ljudets hastighet. En förenklad pitchrörelseekvation kopplar kapselns anfallsvinkel över tiden till de okända återställande och dämpande termerna. Genom att använda en global sökalgoritm kombinerad med bayesiansk sampling hittar metoden, vid ett fåtal nyckelvinklar, vilka värden på dessa termer som bäst återger den simulerade rörelsen och vilket intervall av värden som fortfarande är rimligt med hänsyn till brus och modelleringsbegränsningar.
Lära en surrogatmodell var den ska leta härnäst
Därefter bygger teamet en surrogatmodell — en flexibel statistisk kurva — som predikterar stabilitetsbeteendet över ett kontinuerligt intervall av vinklar och som bär ett osäkerhetsband runt varje förutsägelse. De använder en Gaussian process, ett välanvänt verktyg för att modellera okända funktioner med inbyggda uppskattningar av förtroende. Avgörande är att de inte samplar vinklar jämt. I stället skannar en adaptiv regel efter kombinationer av vinkel och Mach-tal där surrogaten både är osäker och förutspår en stark respons. Vid dessa lovande punkter kör de en lokal bayesiansk inversion igen, lägger till de nya, mer exakta skattningarna i träningsuppsättningen och uppdaterar surrogaten. Denna loop fortsätter tills osäkerheten över vinkelintervallet planar ut.
Vad metoden avslöjar om kapselns beteende
Tillämpat på Genesis-kapseln vid Mach-tal från 1,10 till 1,50 avslöjar angreppssättet stabila och fysiskt rimliga trender. Återställningskoefficienten förblir konsekvent negativ, vilket betyder att kapseln naturligt försöker ställa sig rätt över de testade vinklarna, med endast måttliga förändringar när hastigheten ökar. Dämpningsbeteendet är mer dramatiskt: vid mycket små vinklar kan rörelsen tillfälligt växa innan den blir starkt dämpad vid högre vinklar och högre Mach-tal, där chockar och turbulenta vakar suger energi ur svängningarna. Den adaptiva inlärningsprocessen minskar epistemisk (kunskapsbaserad) osäkerhet i dessa kurvor med mer än hälften, och när de resulterande funktionerna matas tillbaka i rörelseekvationen reproducerar de de ursprungliga simuleringsbanorna inom ungefär en grad för både tränings- och hållna testfall.
Vad detta betyder för framtida digitala tvillingar
I vardagliga termer visar författarna hur man kan förvandla några dyra, högupplösta simuleringar till en pålitlig, kontinuerlig bild av hur en återinträdeskapsel håller balansen, tillsammans med ärliga felstaplar som visar var kunskapen är stark eller svag. Denna typ av adaptiv, osäkerhetsmedveten surrogatmodell är en nyckelkomponent för digitala tvillingar av rymdfarkoster, som måste göra snabba, säkerhetskritiska prediktioner utan att ständigt köra om omfattande simuleringar. Genom att lära sig var ytterligare data är mest värdefulla och genom att kvantifiera förtroendet i varje prediktion hjälper ramverket ingenjörer att designa mer robusta återinträdessystem och banar väg för virtuella tvillingar som kan vägleda verkliga farkoster säkert hem.
Citering: Tiwari, B., Musharrat, L., Romeo, S.A.S. et al. Adaptive Bayesian learning for stability characterization of re-entry vehicles. Sci Rep 16, 10267 (2026). https://doi.org/10.1038/s41598-026-40068-7
Nyckelord: återinträdesfordon, aerodynamisk stabilitet, bayesiansk inlärning, digitala tvillingar, Gaussian process-surmattningar