Clear Sky Science · fr
Apprentissage bayésien adaptatif pour la caractérisation de la stabilité des véhicules de rentrée
Pourquoi il est essentiel de garder les engins spatiaux de retour stables
Quand une capsule replonge dans l’atmosphère d’une planète, de légers changements dans son basculement et ses oscillations peuvent faire la différence entre un atterrissage en douceur et une rotation dangereuse. Pourtant, les données détaillées nécessaires pour prédire ce comportement sont rares et extrêmement coûteuses à produire. Cet article présente une nouvelle façon d’apprendre, à partir d’un nombre limité de simulations numériques, comment les véhicules de rentrée conservent leur stabilité et quel degré de confiance les ingénieurs peuvent avoir dans ces prédictions. Le travail ouvre aussi la voie à des jumeaux numériques plus fiables — des copies virtuelles des engins spatiaux qui se mettent à jour au fur et à mesure que de nouvelles informations arrivent.
Comment une capsule de rentrée prend son tangage
Lorsqu’une capsule à nez obtus plonge dans l’air, les forces à sa surface la font basculer vers le haut et le bas, un peu comme une bouée qui oscille. Deux éléments principaux gouvernent ce mouvement : un effet de rappel qui tend à réaligner la capsule avec l’écoulement, et un effet d’amortissement qui calme ou amplifie ses oscillations. Les ingénieurs résument ces comportements par des coefficients de stabilité, qui dépendent de la vitesse du véhicule et de l’angle d’attaque. Dans les régimes transsonique et bas-supersonique, où on observe des ondes de choc, des traînées turbulentes et l’interaction avec des structures flexibles, ces coefficients varient de façon complexe et sont difficiles à mesurer directement.
Pourquoi les méthodes traditionnelles montrent leurs limites
Les outils classiques — tunnels aérodynamiques, essais balistiques et simulations numériques 3D haute fidélité — n’offrent chacun qu’une partie du tableau. Les tunnels peuvent déformer l’écoulement autour de modèles à l’échelle, les essais en trajectoire ne fournissent que des données éparses, et les simulations haute fidélité sont si coûteuses qu’on ne peut en lancer que peu de cas. Les approches passées ajustaient souvent de simples courbes sur ces points épars, mais fournissaient généralement un unique meilleur estimé sans évaluer clairement l’incertitude. Cela laisse les ingénieurs avec des courbes de stabilité susceptibles de manquer des tendances importantes entre les angles échantillonnés et sans indication sur les endroits où des données supplémentaires amélioreraient le plus la confiance.
Une boucle d’apprentissage qui comble les lacunes
Les auteurs proposent un cadre bayésien adaptatif qui considère le comportement de stabilité inconnu comme une fonction lisse mais incertaine plutôt que comme un ensemble de nombres isolés. D’abord, ils simulent la capsule de retour Genesis en tangage libre à plusieurs vitesses juste au-dessus de la vitesse du son. Une équation simplifiée du mouvement en tangage relie l’angle d’attaque au fil du temps aux termes de rappel et d’amortissement inconnus. À l’aide d’un algorithme de recherche globale combiné à un échantillonnage bayésien, la méthode identifie, à quelques angles clés, quelles valeurs de ces termes reproduisent au mieux le mouvement simulé et quelle plage de valeurs reste plausible compte tenu du bruit et des limites du modèle.
Apprendre au modèle de substitution où regarder ensuite
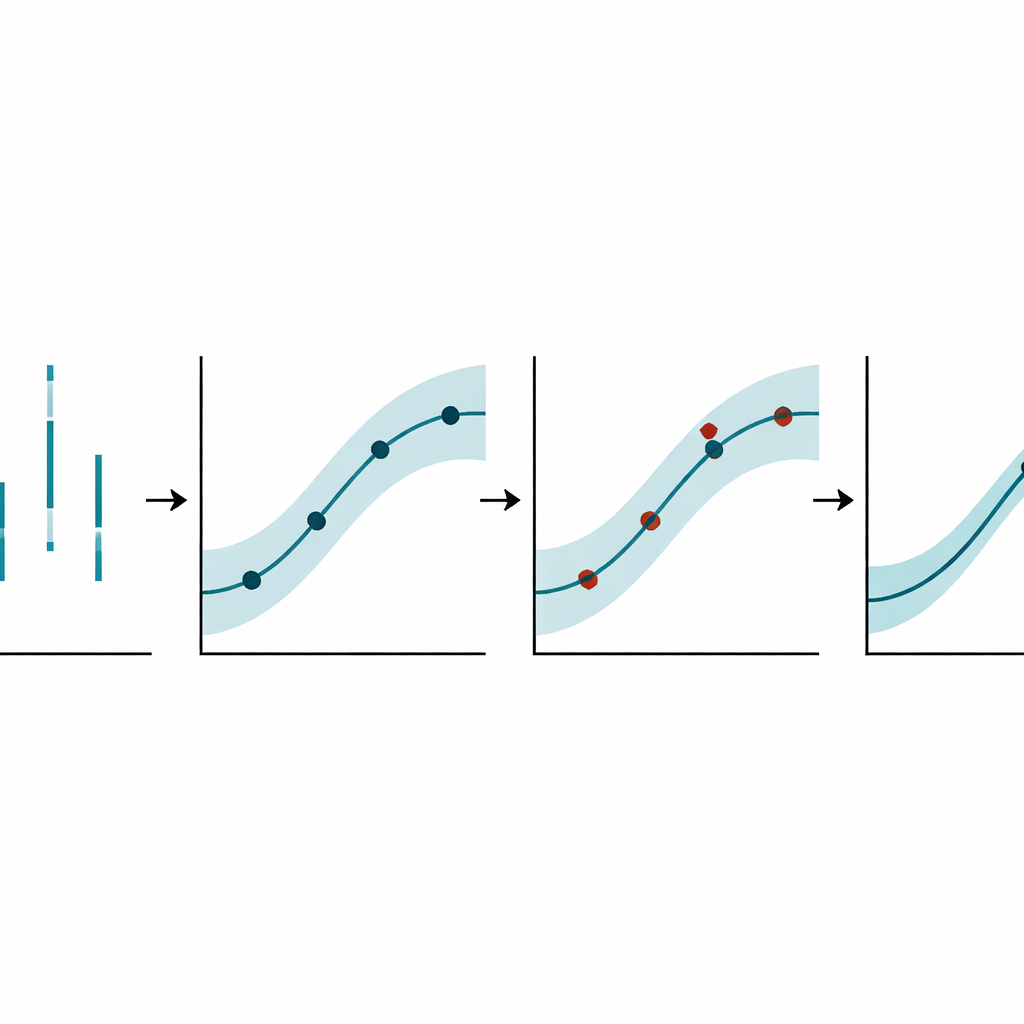
Puis l’équipe construit un modèle de substitution — une courbe statistique flexible — qui prédit le comportement de stabilité sur une plage continue d’angles et associe une bande d’incertitude à chaque prédiction. Ils utilisent un processus gaussien, un outil répandu pour modéliser des fonctions inconnues avec des estimations de confiance intégrées. De façon cruciale, ils n’échantillonnent pas les angles uniformément. Au lieu de cela, une règle adaptative scrute les combinaisons d’angle et de nombre de Mach où le surrogat est à la fois incertain et prédit une réponse forte. À ces points prometteurs, ils relancent une inversion bayésienne locale, ajoutent les nouvelles estimations plus précises au jeu d’entraînement et mettent à jour le surrogat. Cette boucle se poursuit jusqu’à ce que l’incertitude sur la plage d’angles se stabilise.
Ce que la méthode révèle sur le comportement de la capsule
Appliquée à la capsule Genesis pour des nombres de Mach de 1,10 à 1,50, l’approche met au jour des tendances stables et physiquement cohérentes. Le coefficient de rappel reste systématiquement négatif, ce qui signifie que la capsule tend naturellement à se redresser sur les angles testés, avec des variations modestes à mesure que la vitesse augmente. Le comportement d’amortissement est plus marqué : à très petits angles, le mouvement peut brièvement croître avant de devenir fortement amorti à des angles plus élevés et à des nombres de Mach plus grands, où les chocs et les traînées turbulentes dissipent l’énergie des oscillations. Le processus d’apprentissage adaptatif réduit l’incertitude épistémique (liée au manque de connaissance) dans ces courbes de plus de moitié, et lorsque les fonctions résultantes sont réinjectées dans l’équation du mouvement, elles reproduisent les trajectoires simulées d’origine à environ un degré près, tant pour les cas d’entraînement que pour des cas de test non utilisés.
Ce que cela signifie pour les futurs jumeaux numériques
En termes concrets, les auteurs montrent comment transformer quelques simulations coûteuses et détaillées en une image continue et fiable de la manière dont une capsule de rentrée conserve son équilibre, accompagnée de barres d’erreur honnêtes qui indiquent où la connaissance est forte ou faible. Ce type de surrogat adaptatif et conscient de l’incertitude est une brique essentielle pour les jumeaux numériques des engins spatiaux, qui doivent produire rapidement des prédictions critiques pour la sécurité sans relancer continuellement des simulations massives. En apprenant où les données supplémentaires sont les plus utiles et en quantifiant la confiance associée à chaque prédiction, le cadre aide les ingénieurs à concevoir des systèmes de rentrée plus robustes et facilite l’émergence de jumeaux virtuels capables de guider en toute sécurité les véhicules réels vers la Terre.
Citation: Tiwari, B., Musharrat, L., Romeo, S.A.S. et al. Adaptive Bayesian learning for stability characterization of re-entry vehicles. Sci Rep 16, 10267 (2026). https://doi.org/10.1038/s41598-026-40068-7
Mots-clés: véhicules de rentrée, stabilité aérodynamique, apprentissage bayésien, jumeaux numériques, surrogats de processus gaussien