Clear Sky Science · nl
Aanpasend Bayesiaans leren voor stabiliteitskarakterisering van terugkeervliegtuigen
Waarom het belangrijk is dat terugkerende ruimtevaartuigen stabiel blijven
Wanneer een capsule terugvalt door de atmosfeer van een planeet, kunnen kleine veranderingen in hoe hij kantelt en wiebelt het verschil betekenen tussen een soepele landing en een gevaarlijke tuimeling. Toch zijn de gedetailleerde gegevens die nodig zijn om dit gedrag te voorspellen schaars en extreem duur om te genereren. Dit artikel presenteert een nieuwe manier om, op basis van beperkte computersimulaties, te leren hoe terugkeervliegtuigen stabiel blijven en hoe zeker ingenieurs kunnen zijn van die voorspellingen. Het werk wijst ook de weg naar betrouwbaardere digitale tweelingen—virtuele kopieën van ruimtevaartuigen die bijwerken zodra nieuwe informatie binnenkomt.
Hoe capsules hun wiebel krijgen
Terwijl een stomp capsule door de lucht duikt, zorgen krachten op het oppervlak ervoor dat hij omhoog en omlaag kantelt, vergelijkbaar met een deinende boei. Twee hoofdcomponenten bepalen deze beweging: een terugstellend effect dat de capsule probeert terug te wijzen in de stroom en een dempende werking die de oscillaties óf kalmeert óf versterkt. Ingenieurs vatten dit gedrag samen met stabiliteitscoëfficiënten, die afhangen van de snelheid van het voertuig en de invalshoek van de lucht. In de lastige transsonische en lage-supersonische regimes, waar schokgolven, turbulente wervels en flexibele structuren elkaar beïnvloeden, veranderen deze coëfficiënten op complexe manieren die moeilijk direct te meten zijn.
Waarom traditionele tests tekortschieten
Klassieke middelen—windtunnels, ballistische baanproeven en volledige 3D-vloeistofsimulaties—leveren elk slechts een deel van het plaatje. Windtunnels kunnen de stroming rond geschaalde modellen verstoren, baanproeven geven alleen spaarzame trajectgegevens en high-fidelity simulaties zijn zo kostbaar dat slechts enkele gevallen kunnen worden uitgevoerd. Eerdere methoden passen vaak eenvoudige krommen door deze verspreide datapunten, maar ze geven meestal slechts een beste schatting en geen duidelijk beeld van de onzekerheid. Daardoor blijven ingenieurs zitten met stabiliteitscurven die belangrijke trends tussen bemonsterde hoeken kunnen missen en weinig aanwijzing geven waar extra gegevens de meeste verbetering in vertrouwen zouden opleveren.
Een leerlus die de gaten opvult
De auteurs stellen een adaptief Bayesiaans kader voor dat het onbekende stabiliteitsgedrag behandelt als een gladde maar onzekere functie in plaats van een handvol geïsoleerde getallen. Eerst simuleren ze een Genesis-sample-return-capsule die vrij pitcht bij verschillende snelheden net boven de geluidssnelheid. Een vereenvoudigde pitch-bewegingsvergelijking koppelt de invalshoek van de capsule in de tijd aan de onbekende terugstellende en dempende termen. Met een globale zoekalgoritme gecombineerd met Bayesiaanse bemonstering vindt de methode, op een paar sleutelhoeken, welke waarden van deze termen het beste de gesimuleerde beweging reproduceren en welk waardenbereik nog plausibel is gezien ruis en modelbeperkingen.
Een surrogaatmodel leren waar het volgende moet kijken
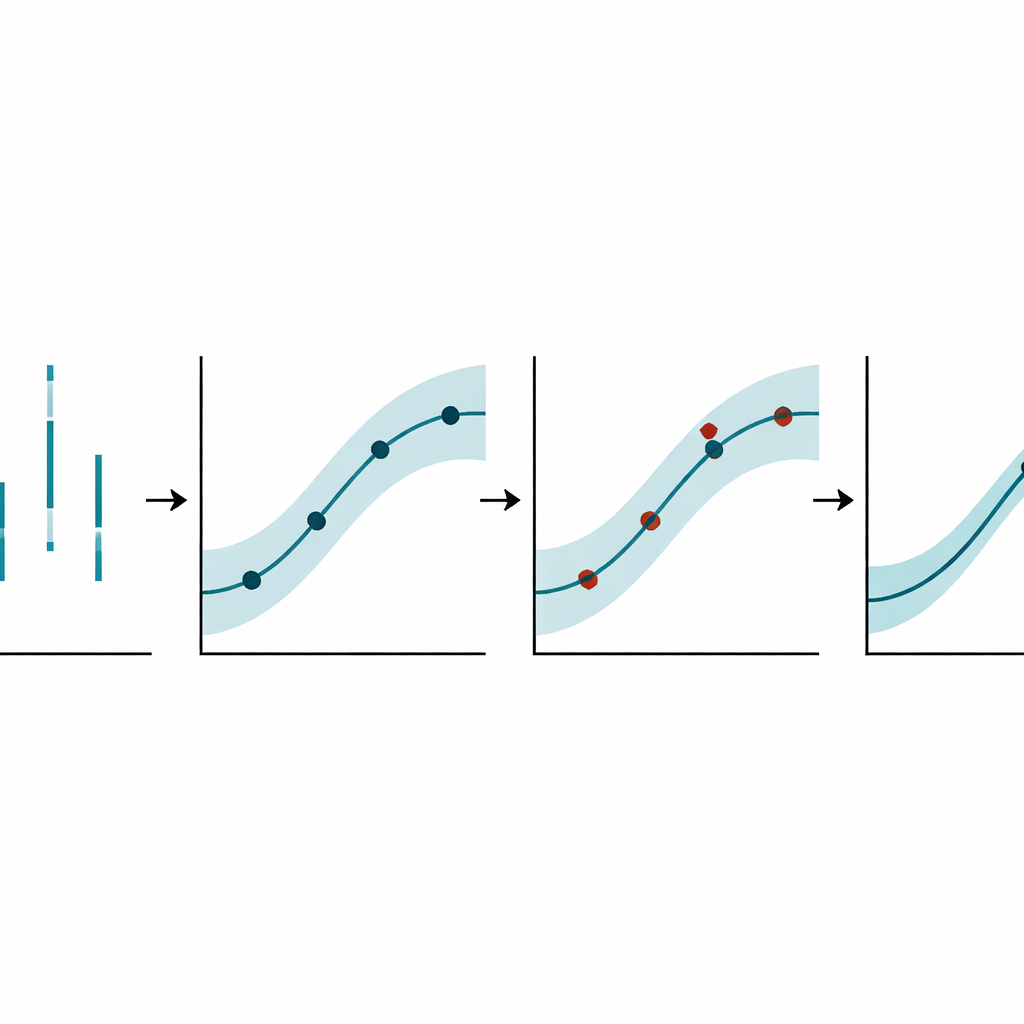
Vervolgens bouwt het team een surrogaatmodel—een flexibel statistisch model—dat het stabiliteitsgedrag over een continu bereik van hoeken voorspelt en bij elke voorspelling een onzekerheidsband meegeeft. Ze gebruiken een Gaussian process, een populair hulpmiddel om onbekende functies te modelleren met ingebouwde betrouwbaarheidsinschattingen. Cruciaal is dat ze hoeken niet uniform bemonsteren. In plaats daarvan scant een adaptieve regel naar combinaties van hoek en Mach-getal waar het surrogaat zowel onzeker is als een sterke respons voorspelt. Op die veelbelovende punten voeren ze opnieuw een lokale Bayesiaanse inversie uit, voegen de nieuwe, nauwkeurigere schattingen toe aan de trainingsset en werken het surrogaat bij. Deze lus gaat door totdat de onzekerheid over het hoekbereik stabiliseert.
Wat de methode onthult over capsulegedrag
Toegepast op de Genesis-capsule bij Mach-getallen van 1,10 tot 1,50 onthult de aanpak stabiele en fysisch consistente trends. De terugstellende coëfficiënt blijft consequent negatief, wat betekent dat de capsule er van nature naar neigt zich weer in de stroming te richten over de geteste hoeken, met slechts milde veranderingen bij toenemende snelheid. Het dempingsgedrag is dramatischer: bij zeer kleine hoeken kan de beweging kort groeien voordat ze bij hogere hoeken en hogere Mach-getallen sterk gedempt wordt, waar schokken en turbulente wervels energie uit de oscillaties halen. Het adaptieve leerproces verkleint de epistemische (kennisgebaseerde) onzekerheid in deze curven met meer dan de helft, en wanneer de resulterende functies terug in de bewegingsvergelijking worden gestopt, reproduceren ze de oorspronkelijke simulatie-trajecten binnen ongeveer één graad voor zowel trainings- als achtergehouden testgevallen.
Wat dit betekent voor toekomstige digitale tweelingen
In gewone bewoordingen laten de auteurs zien hoe je een paar dure, gedetailleerde simulaties kunt omzetten in een betrouwbaar, continu beeld van hoe een terugkeercapsule zijn balans bewaart, met eerlijke foutmarges die aantonen waar kennis sterk of zwak is. Dit soort adaptieve, onzekerheidsbewuste surrogaat is een belangrijke bouwsteen voor digitale tweelingen van ruimtevaartuigen, die snel en veiligheidkritisch moeten voorspellen zonder voortdurend uitgebreide simulaties opnieuw uit te voeren. Door te leren waar aanvullende gegevens het meest waardevol zijn en door vertrouwen in elke voorspelling te kwantificeren, helpt het kader ingenieurs robuustere terugkeersystemen te ontwerpen en effent het de weg voor virtuele tweelingen die echte voertuigen veilig naar huis kunnen leiden.
Bronvermelding: Tiwari, B., Musharrat, L., Romeo, S.A.S. et al. Adaptive Bayesian learning for stability characterization of re-entry vehicles. Sci Rep 16, 10267 (2026). https://doi.org/10.1038/s41598-026-40068-7
Trefwoorden: terugkeervliegtuigen, aërodynamische stabiliteit, Bayesiaans leren, digitale tweelingen, Gaussian process-surrogaten