Clear Sky Science · tr
Verimli dehazing ağı ve çok boyutlu özellik füzyonuna dayalı patlatma cevher boyutu tespiti
Modern madencilikte kaya boyutlarının önemi
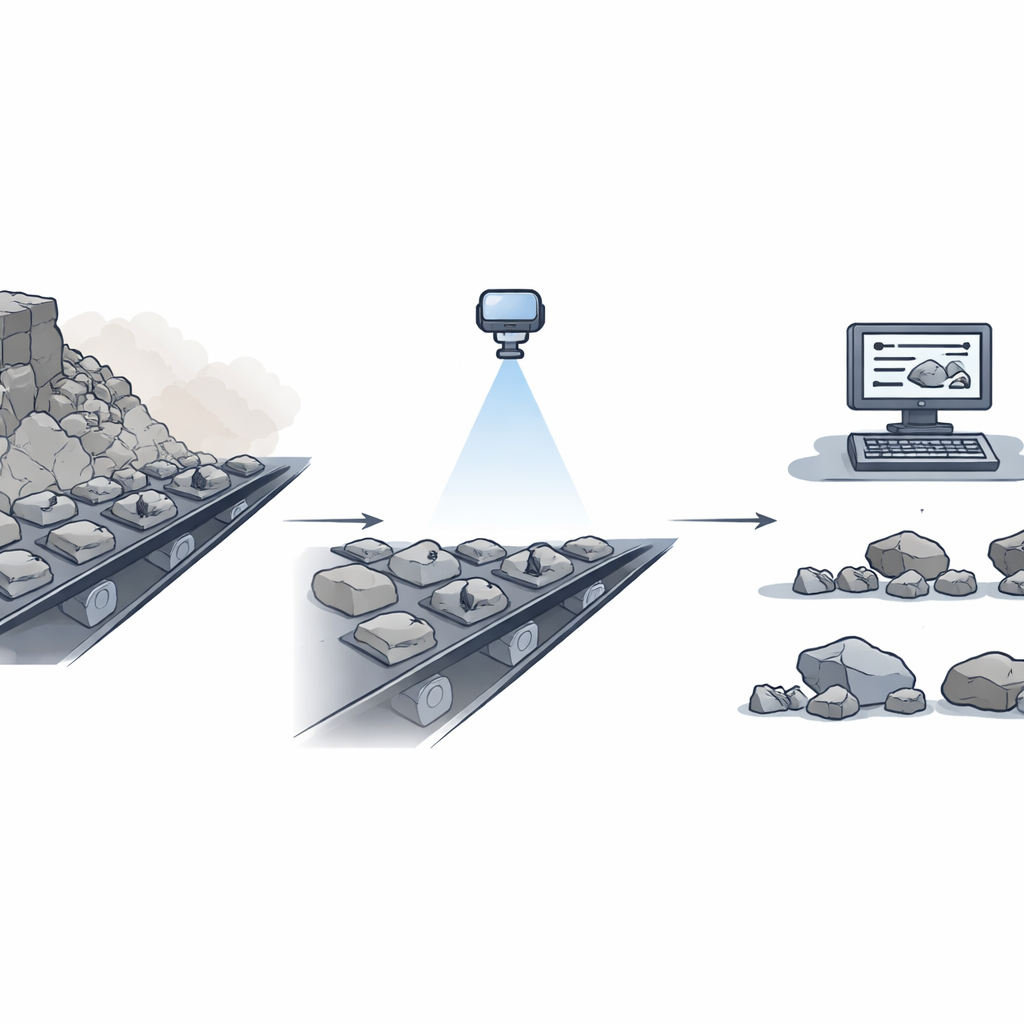
İlk bakışta, bir bant konveyör üzerinde devrilen kırık kayalar sadece moloz gibi görünür. Ancak maden işletmecileri için her bir parçanın boyutu paradır: cevheri ezmek için gereken enerjiyi, makinelerin ne kadar sorunsuz çalışacağını ve hatta işletmenin güvenliğini belirler. Bu makale, tozlu, loş ve ıslak işletme koşullarında bile patlatılmış cevherin boyutunu gerçek zamanlı olarak otomatik ölçebilen yeni bir yapay zeka sistemini anlatıyor—daha verimli ve akıllı madenciliğe giden bir yol sunuyor.
Toz ve karışıklığın içinden görme zorluğu
Açık ocakta patlayıcılarla kayaların kırılmasının ardından ince çakıldan yarım metrenin üzerindeki bloklara kadar değişen parçalar konveyör bantlara ve kırıcıların beslemesine yüklenir. Geleneksel olarak, işçiler tanecik boyutunu manuel elekleme ile ya da eşiğe alma ve kenar tespiti gibi temel görüntü işleme yöntemleriyle değerlendirirdi. Bu yöntemler yavaş, emek yoğun ve toz, değişen ışık ve birbirine değen ya da üst üste binen kayalar tarafından kolayca yanıltılabilir. Lazer tarayıcılar veya stereo kameralar kullanan daha sofistike 3B sistemler çok isabetli olabilir ancak zorlu endüstriyel ortamlarda maliyetli ve bakımı güçtür. Bu nedenle madenlerin ucuz, dayanıklı, hızlı ama kırma ve patlatma kararlarını yönlendirecek kadar hassas bir araca ihtiyacı vardır.
Kayan sahneler için geliştirilmiş bir göz
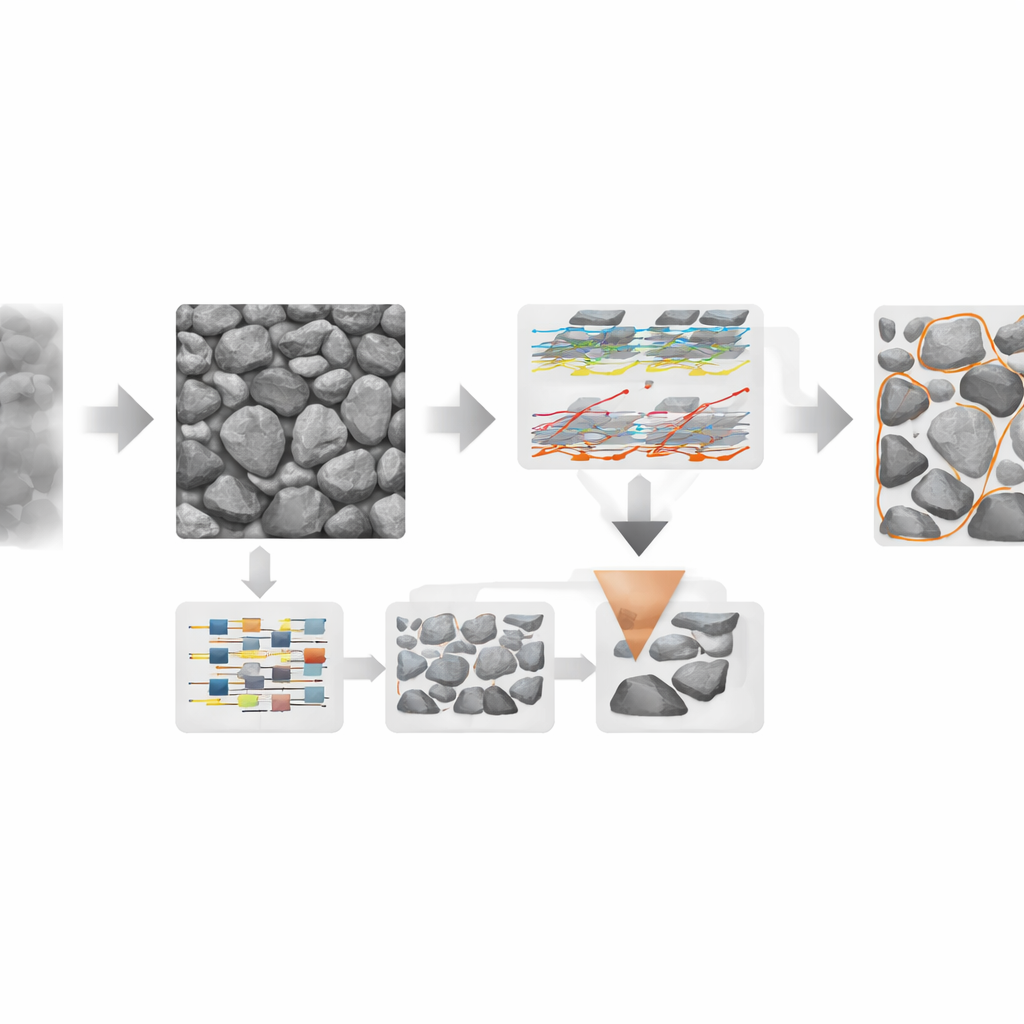
Yazarlar, popüler gerçek zamanlı nesne tespiti ağı YOLOv8’i temel alıyor ve bunu özellikle patlatılmış cevher için yeniden şekillendiriyor. Öncelikle, sistemin en önüne bir toz giderme modülü yerleştiriyorlar. FFA-Net olarak bilinen bir görüntü “dehazing” ağından uyarlanan bu modül, ayrı bir ön işleme adımı olmak yerine dedektörle birlikte eğitiliyor. Kontrastı artırmayı, kaya kenarlarını keskinleştirmeyi ve duman ile ince parçacıkların neden olduğu görsel örtüyü bastırmayı öğreniyor. Temizlenen görüntü daha sonra her nöronun “gördüğü” alanı kademeli olarak genişleten ancak pratik dağıtım için hesaplamayı hafif tutan MBConv bloklarından oluşan verimli bir backbone’a akıyor.
Hem küçük çiplere hem de iri bloklara ulaşmak
Sistemin bir sonraki yeniliği, bilgiyi ölçekler boyunca nasıl birleştirdiğinde yatıyor. Gerçek patlama yığınlarında küçük parçalar büyük blokların arasına sıkışır ve pek çok parça üst üste biner. YOLO’nun standart sürümleri esas olarak yerel konvolüsyon filtrelerine dayanır, bu da küçük ya da kısmen gizlenmiş parçaları kaçırabilir. Burada yazarlar, düz konvolüsyonları son zamanlarda öne çıkan durum uzayı modellerinden (Vmamba) esinlenen bir sıra modelleme bileşeniyle karıştıran I3SS adlı yeni bir “neck” modülü tanıtıyor. Konvolüsyonlar ince doku ve kenar ipuçlarını çıkarırken, sıra kısmı transformer tarzı dikkat maliyetine girmeden görüntü genelinde uzak pikselleri verimli şekilde birbirine bağlıyor. Çapraz yol füzyon tasarımı ayrıca özellikler son dedektöre ilerlerken ince cevher detaylarının yok olmamasını sağlamak için olağandan daha yüksek çözünürlüklü bir özellik haritasını sisteme katıyor.
Daha uyarlanabilir bir karar aşaması
Son olarak ekip, YOLOv8’in sabit tespit başlığını, yerel koşullara göre bilgiyi yeniden ağırlayabilen bir “Dinamik Başlık” ile değiştiriyor. Bu başlık bir kayanın görüntüde nerede göründüğüne, ne kadar büyük olduğuna ve hangi tür tahminin gerektiğine (varlık, konum veya boyut) dikkat ediyor ve iç vurgu ayarlarını buna göre yapıyor. Sonuç olarak sistem, hareket bulanıklığı, lambalardan gelen parlama veya suyla ıslanmış kaya yüzeyleri gibi sınırları yumuşatan ve bitişik parçaları birbirine karıştıran durumlar tarafından daha az etkileniyor. Yazarlar ayrıca gündüz ve gece sahnelerini, kuru ve ıslak cevheri ve hafiften yoğun toza kadar değişen koşulları kapsayan gerçek bir çene kırıcı beslemesinden alınmış 356 yüksek çözünürlüklü görüntüden oluşan özel bir veri setini bir araya getirip dikkatle etiketlemişler.
Yeni sistemin performansı ne kadar iyi
İyi bilinen çeşitli tespit modellerine karşı test edildiğinde, iyileştirilmiş ağ hem geleneksel iki aşamalı dedektörleri hem de birkaç yeni hafif YOLO varyantını geride bırakıyor. YOLOv8n temel çizgisine kıyasla sekiz cevher boyutu kategorisi genelinde ortalama hassasiyet yaklaşık 7 puan artıyor ve standart örtüşme eşiğinde ana ölçüt olan mAP 7.6 puan yükseliyor. Kazançlar özellikle en ince parçalar için çarpıcı: yaklaşık 72 milimetreden daha küçük cevherler için hassasiyet 18.8 puan, geri çağırma (recall) ise 13.8 puan artıyor; bu da çok daha az küçük parçanın kaçırıldığı anlamına geliyor. Basitleştirilmiş bir “tüm-cevher” testinde sistem %84 geri çağırma ve %88.1 mAP ulaşıyor ve işleme hızı nispeten yavaş hareket eden konveyör bantlar için yeterli kalıyor.
Daha akıllı madencilik için anlamı
Pratik açıdan bakıldığında bu çalışma, pahalı 3B donanıma gerek kalmadan gerçek üretim koşullarında sürekli patlama sonuçlarını izleyebilen kamera tabanlı bir araç sunuyor. Tozun içinden görerek ve kalabalık kaya parçalarını çözerek özellikle downstream enerji kullanımını güçlü şekilde etkileyen küçük parçalar için daha güvenilir boyut dağılımı istatistikleri sağlıyor. Bu bilgiler patlama tasarımlarına, kırıcıların işletimine ve enerji bütçelerinin planlanmasına geri besleme sağlayarak açık ocak madenciliğinin daha güvenli ve verimli olmasını destekleyebilir. Yazarlar gelecekte gerçek şekil segmentasyonu veya 3B ipuçları eklenebileceğini not ediyor, ancak mevcut haliyle yöntem cevher kırma ve işleme üzerinde veri odaklı, akıllı kontrol yolunda sağlam ve dağıtılabilir bir adım sunuyor.
Atıf: Li, P., Xie, S., Zhang, W. et al. Blasting ore size detection based on efficient dehazing network and multi-dimensional feature fusion. Sci Rep 16, 11445 (2026). https://doi.org/10.1038/s41598-026-39514-3
Anahtar kelimeler: cevher parçalanması, bilgisayarlı görü, derin öğrenme, endüstriyel izleme, nesne tespiti