Clear Sky Science · pl
Wykrywanie rozmiaru urobku po wybuchu oparte na wydajnej sieci do usuwania mgły i wielowymiarowej fuzji cech
Dlaczego rozmiary skał mają znaczenie we współczesnym górnictwie
Na pierwszy rzut oka sterta rozdrobnionych skał przemieszczająca się po taśmie przypomina zwykłe gruzowisko. Dla operatorów kopalni wielkość każdego kawałka to jednak pieniądze: determinuje ona, ile energii potrzeba do kruszenia rudy, jak płynnie pracują maszyny, a nawet jak bezpieczna jest operacja. Artykuł opisuje nowy system sztucznej inteligencji, który potrafi automatycznie mierzyć rozmiar urobku po wybuchu w czasie rzeczywistym, nawet w zakurzonych, przyciemnionych i mokrych warunkach panujących w działającej kopalni — otwierając drogę do bardziej wydajnego i inteligentnego górnictwa.
Wyzwanie widzenia przez kurz i zamieszanie
Po rozbiciu skał materiał z wybuchu — od drobnego żwiru po głazy o średnicy przekraczającej pół metra — trafia na taśmy transportowe i do kruszarek. Tradycyjnie pracownicy oceniali wielkość cząstek ręcznie, przez przesiewanie, lub z użyciem prostych metod przetwarzania obrazu, takich jak progowanie i wykrywanie krawędzi. Metody te są powolne, pracochłonne i łatwo je zmylić kurzem, zmiennym oświetleniem oraz przez kawałki skał stykające się lub nachodzące na siebie. Bardziej zaawansowane systemy 3D wykorzystujące skanery laserowe lub kamery stereoskopowe mogą być bardzo dokładne, ale są kosztowne i trudne w utrzymaniu w surowych warunkach przemysłowych. Kopalnie potrzebują więc narzędzia taniego, odpornego i szybkiego, a jednocześnie wystarczająco dokładnego, by kierować decyzjami dotyczącymi wysadzeń i kruszenia.
Ulepszone oko do skalistych scen
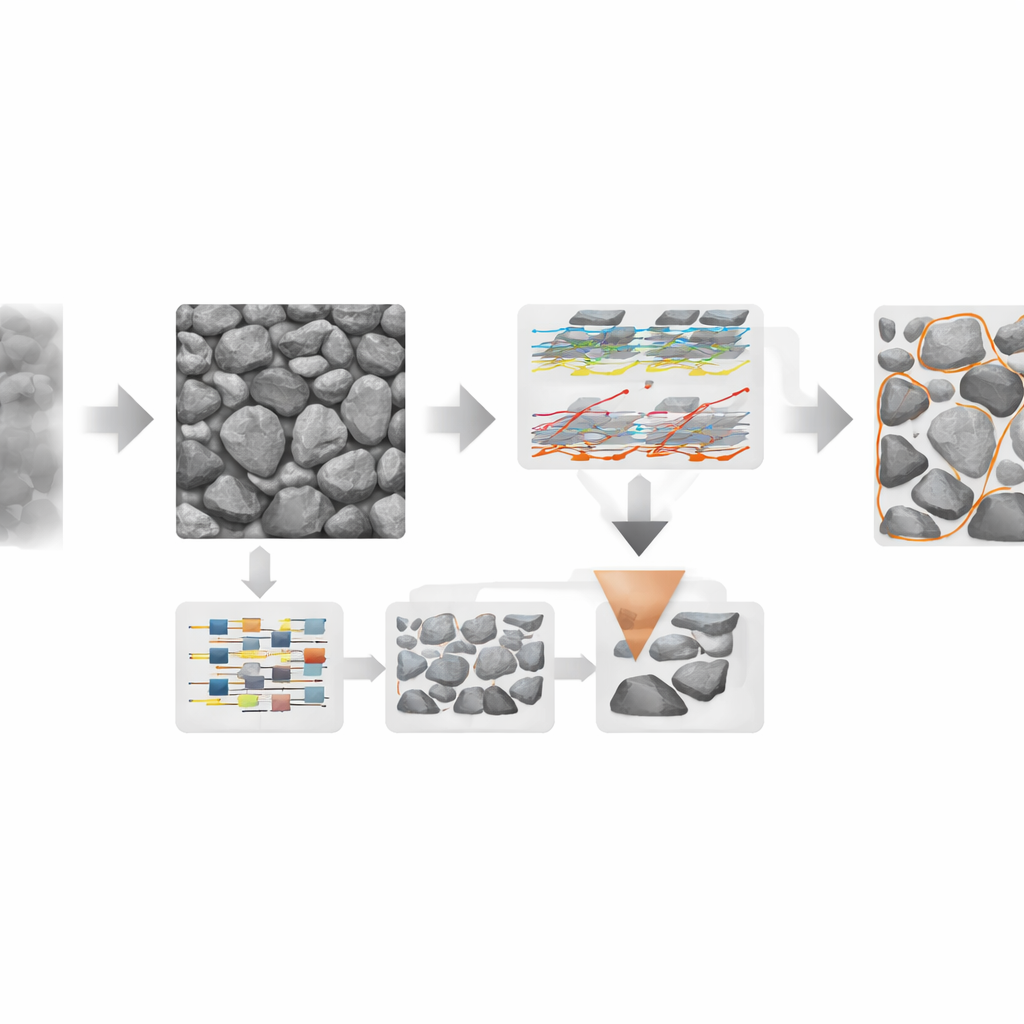
Autorzy bazują na YOLOv8, popularnej sieci do wykrywania obiektów w czasie rzeczywistym, i przekształcają ją specjalnie pod kątem urobku po wybuchu. Najpierw wstawiają moduł usuwania kurzu na samym początku systemu. Moduł ten, zaadaptowany z sieci do „odmglania” obrazu znanej jako FFA-Net, jest trenowany wspólnie z detektorem zamiast działać jako odrębny etap wstępnego przetwarzania. Uczy się on poprawiać kontrast, wyostrzać krawędzie skał i tłumić wizualną zasłonę powodowaną przez dym i drobne cząstki. Oczyszczony obraz trafia następnie do wydajnego „kręgosłupa” złożonego z bloków MBConv, które stopniowo rozszerzają obszar widzenia każdego neuronu, jednocześnie utrzymując obliczenia na tyle lekkie, by można je było praktycznie wdrożyć przy zasilaniu kruszarki.
Wykrywanie zarówno drobnych odprysków, jak i masywnych głazów
Następna innowacja dotyczy sposobu łączenia informacji na różnych skalach. W prawdziwych hałdach po wybuchu drobne fragmenty są upchane między dużymi blokami, a wiele elementów zachodzi na siebie. Standardowe wersje YOLO opierają się głównie na lokalnych filtrach splotowych, które mogą przeoczyć drobne lub częściowo ukryte kawałki. Tutaj autorzy wprowadzają nowy moduł „neck” nazwany I3SS, który miesza proste konwolucje z komponentem modelującym sekwencje, inspirowanym niedawnymi modelami przestrzeni stanów (Vmamba). Konwolucje wydobywają subtelne tekstury i wskazówki krawędzi, natomiast część sekwencyjna łączy efektywnie odległe piksele w obrazie bez dużych kosztów związanych z uwagą w stylu transformera. Konstrukcja z krzyżowym przepływem (cross-path fusion) dodatkowo wprowadza mapę cech o wyższej rozdzielczości niż zwykle, dzięki czemu detale drobnego urobku nie ulegają rozmyciu w miarę przesuwania się cech ku końcowemu detektorowi.
Bardziej adaptowalny etap decyzyjny
Na koniec zespół zastępuje stałą głowicę detekcyjną YOLOv8 „Dynamic Head”, która potrafi ponownie ważyć informacje w zależności od warunków lokalnych. Głowica ta zwraca uwagę na to, gdzie na obrazie pojawia się skała, jak duża jest oraz jaki rodzaj predykcji jest potrzebny (obecność, położenie czy rozmiar), i odpowiednio dostosowuje swoje wewnętrzne priorytety. W efekcie system mniej podatny jest na rozmycie ruchu, oślepiające refleksy lamp czy mokre, śliskie powierzchnie skał — czynniki, które zwykle zmiękczają granice i zlewają sąsiednie fragmenty. Autorzy zebrali również i starannie oznaczyli dedykowany zbiór danych składający się z 356 obrazów o wysokiej rozdzielczości z rzeczywistego zasilania kruszarki szczękowej, obejmujący sceny dzienne i nocne, suchy i mokry urobek oraz od niewielkiego do dużego zapylenia.
Jak dobrze radzi sobie nowy system
W testach przeciwko szeregowi znanych modeli detekcyjnych ulepszona sieć przewyższa zarówno tradycyjne detektory dwustopniowe, jak i kilka niedawnych, lekkich wariantów YOLO. W porównaniu z bazową wersją YOLOv8n średnia precyzja w ośmiu kategoriach rozmiaru urobku wzrasta o około 7 punktów procentowych, a główny wynik mAP przy standardowym progu nakładania się zwiększa się o 7,6 punktu procentowego. Zyski są szczególnie wyraźne dla najdrobniejszych kawałków: dla urobku mniejszego niż około 72 milimetry precyzja rośnie o 18,8 punktu procentowego, a recall o 13,8, co oznacza znacznie mniej pominiętych małych fragmentów. W uproszczonym teście „wszystkiego urobku” system osiąga recall na poziomie 84% i mAP równy 88,1%, przy zachowaniu prędkości przetwarzania odpowiedniej dla taśm transportowych poruszających się stosunkowo wolno.
Co to oznacza dla inteligentniejszego górnictwa
W praktyce praca ta dostarcza narzędzie oparte na kamerze, które może monitorować wyniki wysadzeń ciągłe, w warunkach rzeczywistej produkcji, bez kosztownego sprzętu 3D. Dzięki widzeniu przez kurz i rozplątywaniu zatłoczonych fragmentów skał zapewnia bardziej wiarygodne statystyki rozkładu wielkości cząstek, szczególnie dla małych elementów, które w istotny sposób wpływają na zużycie energii w dalszych etapach przetwarzania. Te informacje mogą zasilać pętlę zwrotną przy projektowaniu wysadzeń, eksploatacji kruszarek i planowaniu budżetów energetycznych, wspierając bezpieczniejsze i bardziej efektywne kopalnictwo odkrywkowe. Autorzy zauważają, że przyszłe rozszerzenia mogłyby dodać prawdziwą segmentację kształtów lub wskazówki 3D, ale nawet w obecnej formie podejście stanowi solidny i wdrażalny krok w stronę inteligentnej, opartej na danych kontroli rozdrabniania i przetwarzania rudy.
Cytowanie: Li, P., Xie, S., Zhang, W. et al. Blasting ore size detection based on efficient dehazing network and multi-dimensional feature fusion. Sci Rep 16, 11445 (2026). https://doi.org/10.1038/s41598-026-39514-3
Słowa kluczowe: fragmentacja rud, wizja komputerowa, głębokie uczenie, monitoring przemysłowy, wykrywanie obiektów